-
实战项目【7】MEMS惯性传感器的精度参数和单位换算
1 前言
-
有不少朋友在做项目的时候经常涉及到加速度计和陀螺仪的原始数据转换为其他的单位的问题,这篇文章梳理和推导一下。 1)加速度计的原始数据 在应用时常见的转换单位有: g、m/s^2 、角度 2)陀螺仪的原始数据 在应用时常见的转换单位有:°/s、red/s、角度
-
是对《几种常用的加速传感参数比较》这篇文件更新,在这篇文章中将不同参加的传感器参数对比和精度参数写在一起,本文专讲精度参数和单位换算
2 测量范围和精度
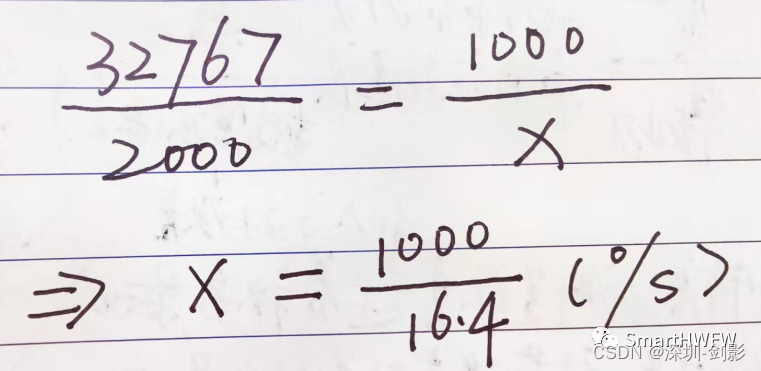
在MEMS 传感的数据手册中都给出了加速度计和陀螺仪的测量范围和测量精度。有测量范围是可以推算出测量精度的。 不论是加速还是陀螺仪,数据寄存器都是16位的,由于最高位是符号位,故而数据寄存器的输出范围是 -7FFF-7FFF (-32767~32767)。 陀螺仪: 假如,我们选择陀螺仪的测量范围是 ±2000,在数据手册中 16.4 LSB/(°/s)是 32767/2000 = 16.4 计算出来的 那么寄存器的数字和测量范围的对应关系:
 比如,通过寄存器读取陀螺仪的值是1000的,那么我们求角速度 X
比如,通过寄存器读取陀螺仪的值是1000的,那么我们求角速度 X
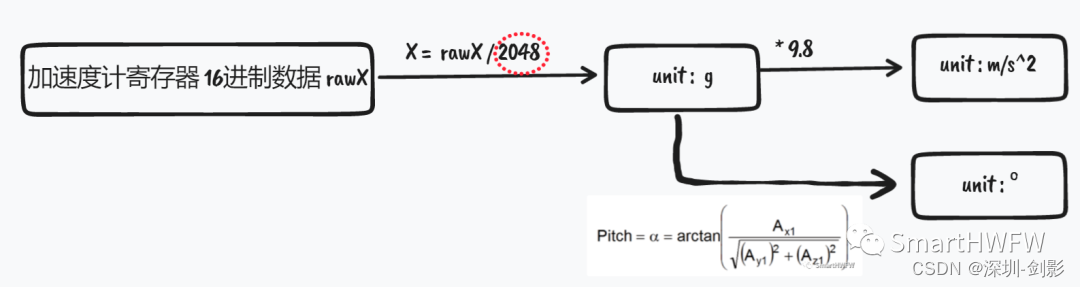
加速度: 同样假如,我们选择加速度的测量范围是 ±16,在数据手册中 2048 LSB/g 是 32767/16 = 2048 计算出来的 那么寄存器的数字和测量范围的对应关系:

比如,通过寄存器读取陀螺仪的值是1000的,那么我们求重力加速度 X X = 1000 / 2048 = 0.49g3 计算单位换算
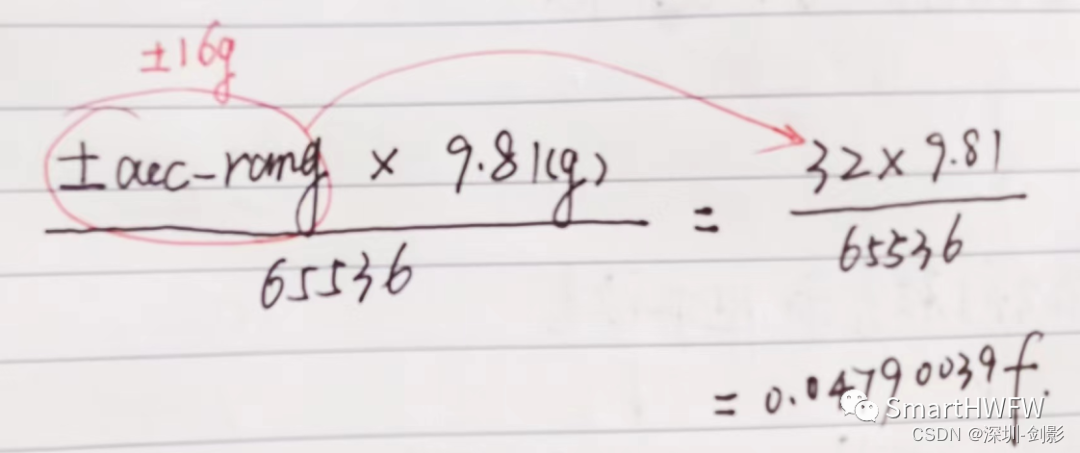
- 不同量程下精度的计算 加速度计量程为:±2g 获取到的加速度计数据 除以16384 加速度计量程为:±4g 获取到的加速度计数据 除以8192 加速度计量程为:±8g 获取到的加速度计数据 除以4096 加速度计量程为:±16g 获取到的加速度计数据 除以2048
2.可以转化为带物理单位的数据,单位:g(m/s^2)
2. 可以通过三角关系转换为角度float tanalpha = 0,tanbeta = 0,tangamma = 0; tanalpha = (float)data->rawx / sqrt( ((float)data->rawy * (float)data->rawy + (float)data->rawz * (float)data->rawz) ); data->anglex = (float)atan(tanalpha)*57.3; tanbeta = (float)data->rawy / sqrt( ((float)data->rawx * (float)data->rawx + (float)data->rawz * (float)data->rawz) ); data->angley = (float)atan(tanbeta)*57.3; tangamma = (float)data->rawz / sqrt( ((float)data->rawy * (float)data->rawy + (float)data->rawx * (float)data->rawx) ); data->anglez = (float)atan(tangamma)*57.3;- 1
- 2
- 3
- 4
- 5
- 6
- 7
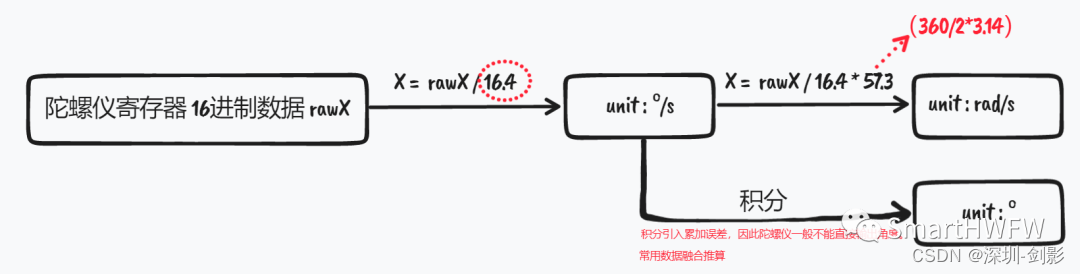
- 不同量程下精度的计算 陀螺仪量程为:±250 dps 获取到的陀螺仪数据除以131 陀螺仪量程为:±500 dps 获取到的陀螺仪数据除以65.5 陀螺仪量程为:±1000dps 获取到的陀螺仪数据除以32.8 陀螺仪量程为:±2000dps 获取到的陀螺仪数据除以16.4 2.可以转化为带物理单位的数据,单位:rad/s

//原始数据 raw_data[AXIS_X] = (buf[0] << 8) | buf[1]; raw_data[AXIS_Y] = (buf[2] << 8) | buf[3]; raw_data[AXIS_Z] = (buf[4] << 8) | buf[5]; //坐标map转换 remap_data[icm_dev.cvt.axis[AXIS_X]] = icm_dev.cvt.sign[AXIS_X] * raw_data[AXIS_X]; remap_data[icm_dev.cvt.axis[AXIS_Y]] = icm_dev.cvt.sign[AXIS_Y] * raw_data[AXIS_Y]; remap_data[icm_dev.cvt.axis[AXIS_Z]] = icm_dev.cvt.sign[AXIS_Z] * raw_data[AXIS_Z]; //重力加速度计算 unit: m/s2 data->x = (float)remap_data[AXIS_X] * KSCALE_ACC_16G_RANGE; data->y = (float)remap_data[AXIS_Y] * KSCALE_ACC_16G_RANGE; data->z = (float)remap_data[AXIS_Z] * KSCALE_ACC_16G_RANGE; //red/s data->x = (float)remap_data[AXIS_X] * KSCALE_GYRO_2000_RANGE; data->y = (float)remap_data[AXIS_Y] * KSCALE_GYRO_2000_RANGE; data->z = (float)remap_data[AXIS_Z] * KSCALE_GYRO_2000_RANGE;- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
4 简单验证数据正确性
据我了解,如果加速度计灵敏度设置为 16g,则值为 2048 = 1g。 当设备平放在桌子上时,我希望看到 x 和 y 加速度计值接近于零,而 z 约为 1g(即 2048 原始值),这是我在其他设备上看到的,但不是 这个新设备。 请参阅所附屏幕截图中的示例。
-
-
相关阅读:
Hi3519AV100通过ORTP库实现局域网图传和VLC实时预览
英语单词和词组笔记
总结springboot启动jar,指定配置文件
Web安全漏洞——SSTI模版注入(初级)
async-validator 源码学习笔记(三):rule
数据库--postgresql
动态规划问题(二)
“蔚来杯“2022牛客暑期多校训练营8,签到题F
Python sorted()函数
(Java版)大小写转换设计一个程序, 输入一行字符串, 将其中大写转为小写, 小写转为大写. 其余字符不变
- 原文地址:https://blog.csdn.net/zhi_Alanwu/article/details/127987674
