-
PointNet 和 PointNet++ 作者讲座学习笔记
前人的工作
三维数据的表达形式
- 点云:深度传感器扫描得到
- Mesh:由三角面片或四边形面片组成,适合建模、渲染
- 体素:把空间划分为三维网格,每个小的正方体组成
- 多角度的图片:用于可视化

点云数据是一种非常适合三维场景理解算法的数据格式:
- 点云非常接近于原始的传感器数据。激光雷达扫描到的数据直接就是点云。可以做一种端到端的深度学习,能尽可能挖掘原始数据中的模式(信息)。
- 点云的表达形式非常简单

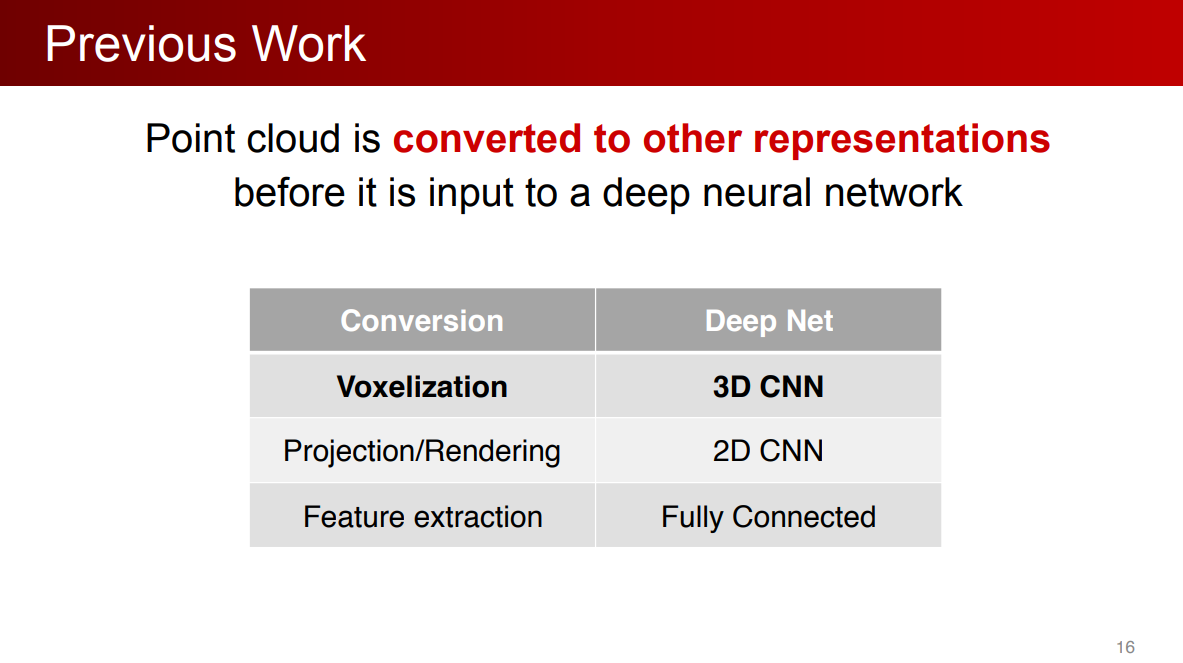
把点云转化为体素,再用3D CNN
之前的工作

时空复杂度很高

PointNet
直接用点云
端到端的学习


两个挑战
- 置换不变性
- 旋转不变性

置换不变性
输入是无序的,模型需要对 N ! N! N!个排列结果保持不变

解决置换不变性的方法:对称函数。
因为对称函数跟排列是没有关系的

在神经网络中如何应用对称函数

对每一维取最大值,但是这样丢失了很多特征。
可以先将数据升维,由于信息冗余,使得 m a x max max操作可以保留更多的点云数据。

一个原始的PointNet结构
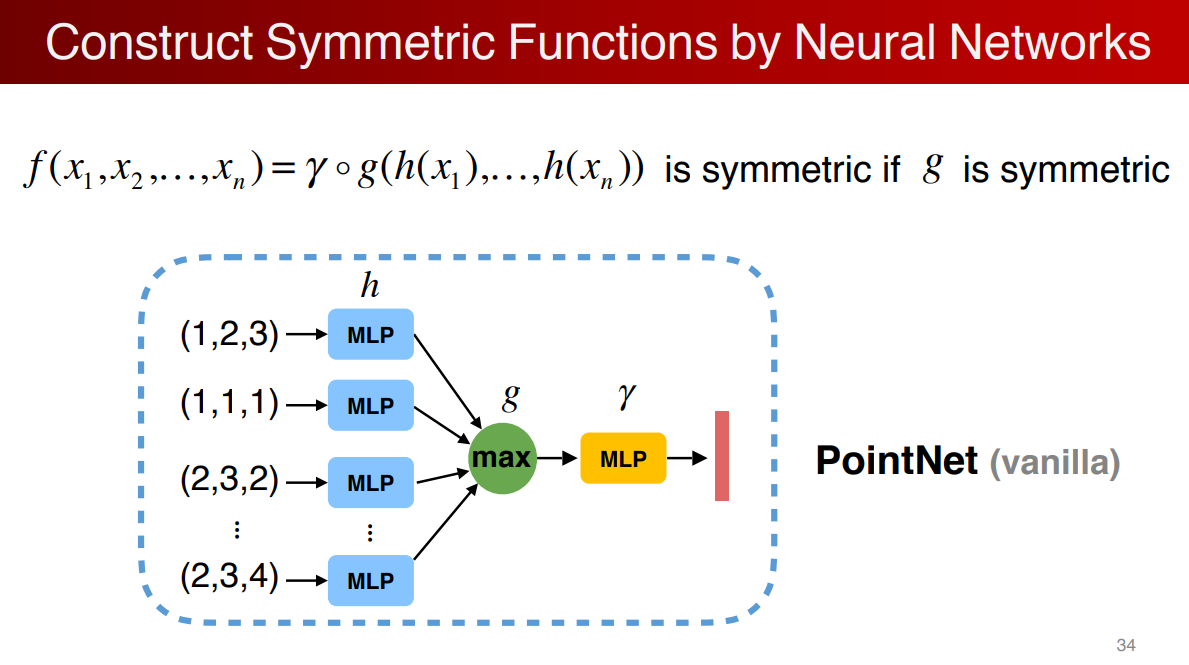
理论证明,PointNet可以逼近任意连续函数

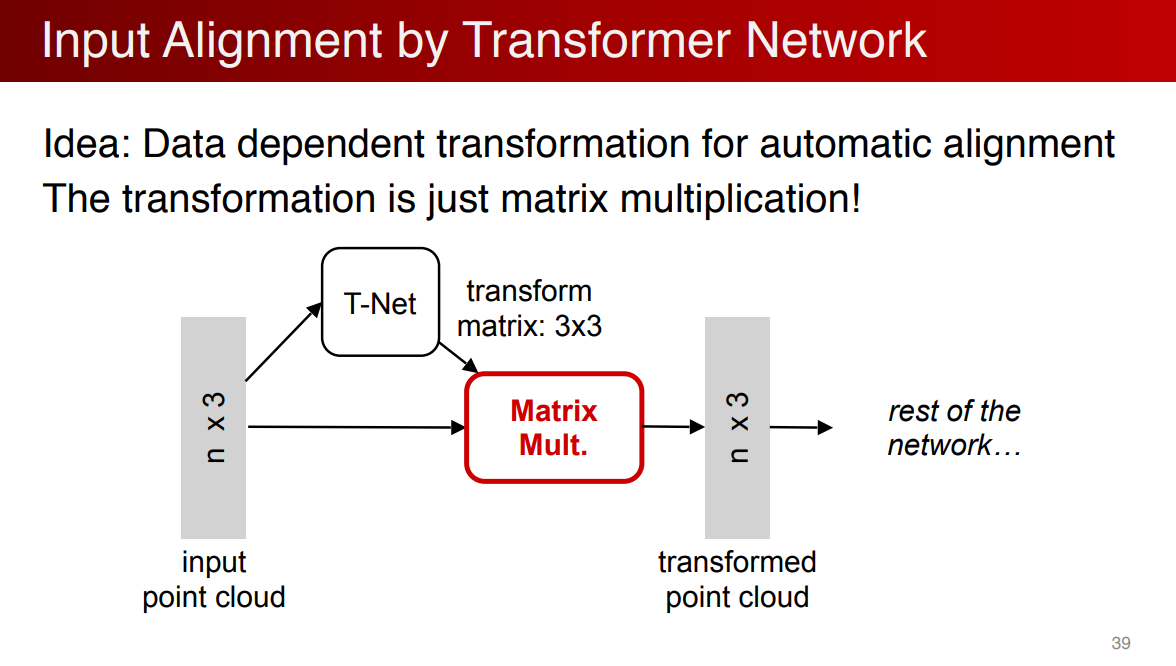
旋转不变性

使用Transformer Network对其输入
PointNet的分类网络

PointNet的分割网络

PointNet对数据丢失是鲁棒的

解释了为什么对点的丢失非常鲁棒,因为学习到了关键点

PointNet的限制
要么是对一个点做操作,要么是对全局的点做操作,它没有局部的操作。

因为没有局部特征的学习,所以在分割精细的点上存在问题,在平移不变性上也有所缺陷。

PointNet++
核心思想:在局部区域重复地迭代性地使用PointNet

- 实现了多级的特征学习
- 因为在区域中,可以用局部坐标系,可以实现平移不变性
- 由于在小区域内使用PointNet,保证了置换不变性
多级点云特征学习
用一个具体例子来理解多级点云特征学习

假设找到红点周围的小区域

因为不想受整体平移的影响,先把小区域的点转化到局部坐标系

对小区域使用PointNet提取局部特征

提取完特征得到一个新的点

这个点不仅有X,Y坐标,还有代表小区域几何形状的特征向量重复这个过程,得到一组新的点

这组点往往在数量上少于原先的点,但每个点代表了它周围几何区域的点。这组操作叫作点集提取。分类
经过两层点集提取,再经过pooling,得到全局特征,然后做分类。

分割
将全局特征再传递给原来的点上就可以实现分割。

小区域大小
如何选择局部小区域的大小?
类比卷积神经网络,在CNN中,小的kernel比较流行。

点云中常见的问题是采样不均匀,近的点非常密,远的点非常疏。一个极端的情况,小区域中只有一个点,那么学习到的特征会非常不稳定。


通过对比实验,得到结论:在点云中,kernel太小的话会被采样率的不均匀所影响。针对这个问题,提出MSG和MRG。
动机是,希望在密的地方相信这个特征;在疏的地方不相信这个特征,而是看更大的区域。

参考资料
-
相关阅读:
HTTP协议
@postconstruct注解获取不到本身的bean
STC8H开发(十五): GPIO驱动Ci24R1无线模块
39+又是一篇惊鸿巨作,教你如何打造高分SCI文章
当新手小白有了一块【香橙派OrangePi AIpro】.Demo
Golang标准包time总结
LLM在text2sql上的应用
QT事件系统_lineEdit输入信息触发事件方法
HPCPlus怎么使用
零基础转行,入职军工类测试方向,月薪10K | 既然选择了,就要全力以赴
- 原文地址:https://blog.csdn.net/m0_46283220/article/details/127938081