-
[ros2实操]1-ros2的安装(ubuntu1804)与运行
参考链接:
Recording and playing back data — ROS 2 Documentation: Galactic documentation使用docker创建了一个ubuntu1804镜像:
docker run -it --gpus all \ -p 8860:8860 \ -v /tmp/.X11-unix:/tmp/.X11-unix \ -v /home/lbw/temp_dir:/temp_dir \ -e DISPLAY=unix$DISPLAY -e GDK_SCALE -e GDK_DPI_SCALE \ --add-host docker_host:172.17.0.2 --add-host master_host:172.17.0.1 \ ubuntu:18.04- 1
- 2
- 3
- 4
- 5
- 6
- 7
安装了一些系统必要的库
apt-get update apt-get install wget apt-get install python3 apt-get install gedit apt-get install python3-argcomplete- 1
- 2
- 3
- 4
- 5
通过鱼香ROS安装命令:
wget http://fishros.com/install -O fishros && . fishros- 1
选择安装ros2-eloquent,安装完毕后运行小乌龟测试:
ros2 run turtlesim turtlesim_node- 1
再看一个窗口:ros2 run turtlesim turtle_teleop_key- 1
小键盘上下左右遥控小乌龟画图
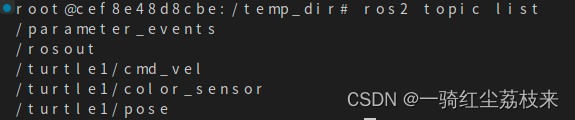
再开一个终端查看消息:
ros2 topic list- 1
打印消息ros2 topic echo /turtle1/cmd_vel- 1
控制乌龟值线行走,可以打印乌龟的速度
ros2消息的操作,需要安装一下ros2 bag.
(和ros1不同,ros2桌面版不带bag工具,需要另外安装)apt-get install ros-eloquent-ros2bag ros-eloquent-rosbag2*- 1
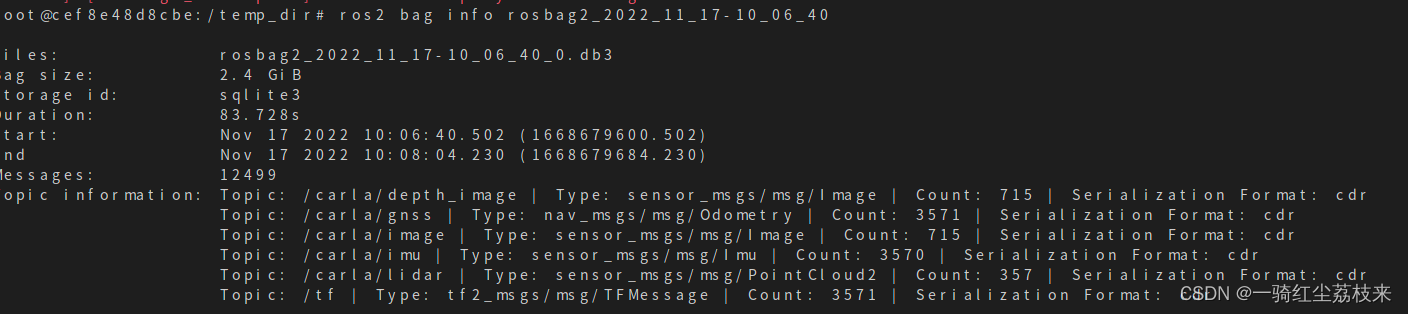
安装安成之后,查看包内消息:
rosbag2_2022_11_17-10_06_40是一个文件夹,ros2录制的都是文件夹:
ros2 bag info rosbag2_2022_11_17-10_06_40- 1
-
相关阅读:
小美的排列构造
[附源码]计算机毕业设计springboot吾悦商城管理系统
RTSP 和 RTMP原理 & 通过ffmpeg实现将本地摄像头推流到RTSP服务器
TSINGSEE青犀AI智能分析算法助力小区规范整改:楼道杂物堆放检测
HTTP协议的请求方式有哪些
Pandas--read_csv,to_csv参数说明
ZnDPA-Cy7 荧光细胞凋亡检测凋亡靶向探针
九、GC收集日志
Vue3理解(9)
Kafka从入门到精通02
- 原文地址:https://blog.csdn.net/condom10010/article/details/127959767