-
PID算法及其实现
PID算法
算法简介
PID即:Proportional(比例)、Integral(积分)、Differential(微分)的缩写。顾名思义,PID控制算法是结合比例、积分和微分三种环节于一体的控制算法。从20世纪30至40年代出现至今,PID算法不仅在工业流程控制中被广泛应用,小到元件温度控制,大到汽车定位巡航等。现在在互联网广告中也有不少应用PID算法的地方
算法应用
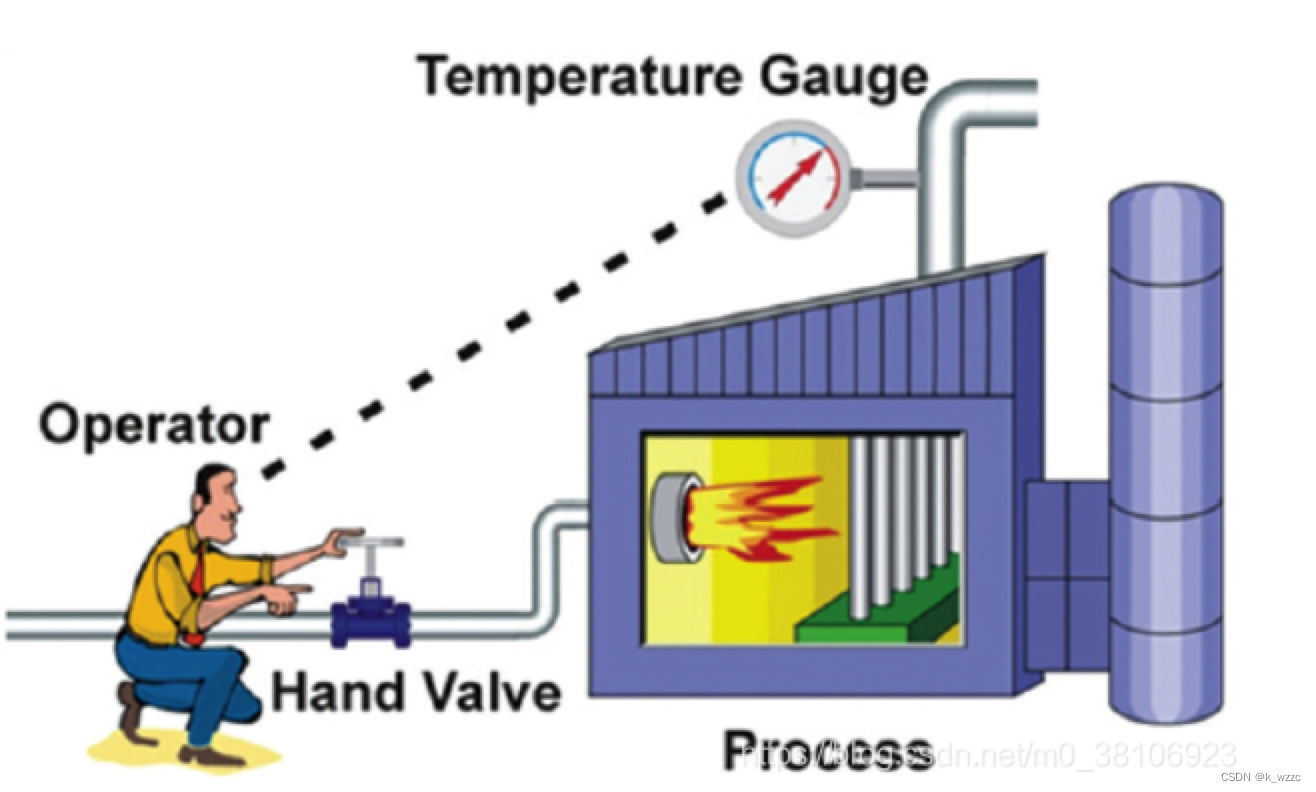
PID算法原理
PID算法公式:
u(t) = K_p(e(t) + \frac{1}{T_t}\int^t_0 e(t){\rm d}t + T_d\frac{de(t)}{dt})- 1
- Tt ——积分时间常数 ;
- Td ——微分时间常数;
- u(t)——PID控制器的输出信号;
- e(t)——给定值r(t)与测量值之差。
经过变换可得
u(t) = K_pe(t) + K_i\int^t_0 e(t){\rm d}t + Kd\frac{de(t)}{dt})- 1
- 2
上面的公式每一部分都对应一个控制算法(比例、积分、微分)
常规的模拟PID控制系统原理框图如下所示:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-jqF6H2CW-1668959786948)(https://note.youdao.com/yws/res/13206/AE61C125214849BE8040D3B8B58B50BF)]PID算法通俗易懂的例子可以参看以下两篇文章:
https://bbs.huaweicloud.com/blogs/229961
https://zhuanlan.zhihu.com/p/39573490PID 算法分类
- 位置式:下一步去哪儿,直接给出变化到的位置
- 增量式:下一步要变化多少到达目标,给出变化量
增量式的算法,这两者只是在算法的实现上的存在差异,本质的控制上对于系统控制的影响还是相同
增量式PID算法公式如下:
u(t) = K_p(e(t)-e(t-1) )+ K_ie(t) + K_d(e(t)-2e(t-1)+e(t-2))- 1
- 2
代码实现
位置式PID
/** * 位置式PID * * @param dt 采样周期 * @param kp 比例增益 * @param ki 积分增益 * @param kd 微分增益 * @param integalError 累积误差 * @param preError 上次误差 */ case class PositionPID( dt: Double, // 采样周期 kp: Double, // 比例增益 ki: Double, // 积分增益 kd: Double, // 微分增益 var integalError: Double = 0, // 累积误差 var preError: Double = 0 // 上次误差 ) { def calculate(targetValue: Double, processValue: Double): Double = { // 误差 error =目标值-过程值 val error = targetValue - processValue // kp * e(t) val p = kp * error // ki* ∑e(t)*δt val i = ki * (error + integalError) * dt integalError += error // kd * (e(t)-e(t-1))/δt val d = kd * (error - preError) / dt // 新的过程值 val out = p + i + d preError = error out } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
增量式PID
/** * * @param dt 采样周期 * @param kp 比例增益 * @param ki 积分增益 * @param kd 微分增益 * @param currentError 当前误差 * @param preError 上次误差 * @param preError2 上上次误差 * @param preOutput 上次输出值 */ case class IncrementPID( dt: Double, // 采样周期 kp: Double, // 比例增益 ki: Double, // 积分增益 kd: Double, // 微分增益 var currentError: Double = 0, // 当前误差 var preError: Double = 0, //上次误差 var preError2: Double = 0, // 上上次误差 var preOutput: Double = 0 // 上次输出值 ) { def calculate(targetValue: Double, processValue: Double): Double = { // 误差 error =目标值-过程值 val error = targetValue - processValue // 比例调节 val p = kp * (error - preError) // 积分调节 val i = ki * error // 微分调节 val d = kd * (error - 2 * preError + preError2) val out = p + i + d + preOutput preError2 = preError preError = error preOutput = out out } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
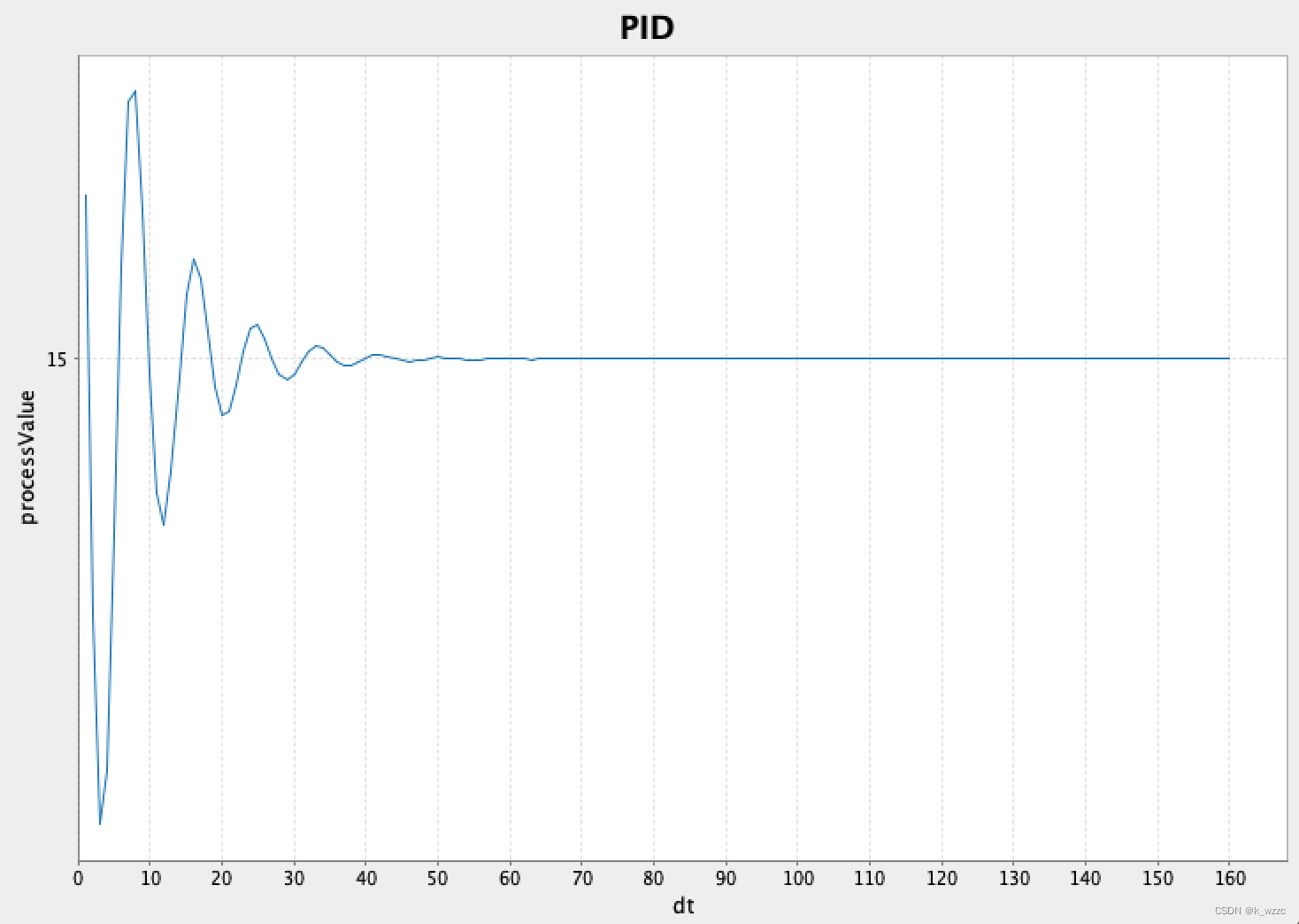
结果测试
def main(args: Array[String]): Unit = { val ppid = PositionPID(0.1, 0.1, 0.5, 0.01) var processValue = 0.0 val targetValue = 15.0 val dts = 1 to 160 for (i <- dts) { val t = ppid.calculate(targetValue, processValue) processValue += t println(s"processValue:${processValue},t:${t}") } val ipid = IncrementPID(0.1, 0.2, 0.5, 0.05) val ps = new ListBuffer[Double]() for (i <- dts) { val t = ipid.calculate(targetValue, processValue) processValue += t ps.append(processValue) println(s"processValue:${processValue},t:${t}") } val f: Figure = Figure() val p: Plot = f.subplot(0) val psv = new DenseVector(ps.toArray) val xlable = new DenseVector(dts.map(_.toDouble).toArray) p += plot(xlable, psv) p.xlabel = "dt" p.ylabel = "processValue" p.title = "PID" f.saveas("/Desktoplines.png") }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
PID控制过程
参考资料
https://zhuanlan.zhihu.com/p/39573490
https://codeantenna.com/a/DcTWiCGMll
https://bbs.huaweicloud.com/blogs/229961
https://mp.weixin.qq.com/s?__biz=Mzg5MDU1OTgzMw==&mid=2247485702&idx=1&sn=b5dd06e736297cdef6fc778b88cdea31&source=41#wechat_redirect
-
相关阅读:
Elasticsearch:运用向量搜索通过图像搜索找到你的小狗
C++基础——new和delete动态开辟
Banana Pi 开源社区发布BPI-M6开源硬件开发板,支持6.75TOPs算力
自动驾驶学习笔记(四)——变道绕行仿真
request 请求类封装
基于机器视觉的移动消防机器人(二)--详细设计
java学习二------锁
【数据结构】红黑树
IM即时通讯开发iOS多设备字体适配方案
关于程序员职业规划的思考
- 原文地址:https://blog.csdn.net/k_wzzc/article/details/127956611
