-
Autoware中的点云3D聚类算法,保姆级算法阅读注释,一看就懂,非常详细!
综述
五大模块,看完等于点云入门~(dog)

实际步骤
-
输入激光雷达获得的点云
-
pcl::PointCloudheader: seq:序列长度 stamp:获取点云的时刻 frame_id:坐标系名称 points:保存点云的容器,类型为std::vector width:类型为uint32_t,表示点云的宽度,即一行点云的数量 height:类型为uint32_t,若为1,代表无序点云,则width代表点云数量;大于1,则有序 is_dense:bool类型,若点云中数据是有限的,则为true;否则为false- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
-
-
剔除距离激光雷达过近的点云(水平方向,XY平面,360度剔除)
- 通过点云中(x,y)坐标到原点的距离判断当前点云是否满足要求
-
对点云进行体素下采样操作
-
点云体素下采样代码
pcl::VoxelGrid- 1
- 2
- 3
- 4
-
操作步骤
- 绘制体素包围盒,包裹住所有点云
- 使用AABB包围盒,即根据x、y、z三轴的最大值和最小值创建包围盒
- 在包围盒内生成体素栅格,栅格大小作者设定,单位是米
- 计算每个栅格中包含所有点云的质心,并输出。即每个栅格只输出一个点云,大幅度缩减了点云数量。
- 实现点云体素下采样
- 绘制体素包围盒,包裹住所有点云
-
-
剔除距离激光雷达过低或过高的点云(垂直方向,Z轴,360度剔除)
- 通过点云的Z坐标判断当前点云是否满足要求,通常取 -1.3 <= Z <= 0.5
- 激光雷达的安装高度已足够高,再加半米足以检测到大多数车辆
-
剔除距离激光雷达左右两侧过远的点云
-
通过点云的Y坐标是否满足限制条件判断,通常取 -1.5 <= Y <= 1.5
-
应用函数
pcl::PointIndices::Ptr、pcl::ExtractIndices-
pcl:PointIndices::Ptr保存点云索引,用于后续点云查找、提取、删除等操作-
普通数组也可以保存点云索引,但是无法应用pcl库中其他函数直接对索引进行处理,所以还是需要利用
pcl::PointIndices::Ptr记录点云索引 -
该函数最主要的部分
indices成员变量,类型为std::vectorpcl::PointIndices::Ptr far_indices(new pcl::PointIndices); far_indices->indices.push_back((unsigned int)index);- 1
- 2
-
-
pcl::ExtractIndices根据作者的设置,输出是否位于索引内的点云 ——>滤波器pcl::ExtractIndices- 1
- 2
- 3
- 4
- 5
- 6
- 7
-
-
-
进行地面点云滤波(去除地面点云)
-
总体流程
-
重要部分:地面点云分割——>几何分割方法(RANSAC:随机采样一致算法),
-
算法步骤原理如下:
- 随机选择点云集合中的三个点,拟合平面模型
- 判断该平面模型法线与Z轴的夹角是否小于0.1弧度。若否,则不考虑,返回步骤1
- 计算其他点云到该平面模型的距离
- 若距离小于0.2(通常选取),则认定该点云是平面模型的内点,并统计内点个数
- 重复迭代,选择内点个数最多的平面模型作为最佳模型,并记录平面模型的点云索引
- 通过点云索引去掉地面点云,完成点云滤波
-
代码设置函数 为何设置迭代次数为100,链接:
pcl::SACSegmentation- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
-
-
-
滤除特征不明显的点云
-
判定特征是否明显的原理:点云曲率越大,对应弧的弯曲程度越大,采样点越多,特征越明显;反之,特征越不明显
-
核心操作:去除曲率小于0.5的点云数据
-
操作流程:
-
核心函数:
-
建立KD搜索树对象:
pcl::search::KdTree -
建立KD搜索树:
tree->setInputCloud(int_cloud_ptr) -
进行法向量粗估计(OMP代表多线程估计,更快):
pcl::NormalEstimationOMP- 设置输入
- 设置搜索方式:
normal_estimation.setSearchMethod(tree) - 设置视点(用于统一法线方向):
normmal_estimation.setViewPoint(0, 0, 0) - 设置搜索半径,进行KD树半径R邻域搜索:
normal_estimation.setRadiusSearch(3) - 拟合平面,并计算点云法向量:
normal_estimation.compute(*normal_point_ptr)
-
进行法向量精估计:基于法向量微分的点云分割(对点云的大小半径做差)–>
pcl::DiffenceOfNormalEstimationdiffnormals_estimator中的PointXYZ、PointNormal、PointNormal分别代表待分割的点云数据、大半径点云法向量、小半径点云法向量- 输入点云、大半径法向量、小半径法向量
diffnormals_estimator.setInputCloud(in_cloud_ptr)diffnormals_estimator.setNormalScaleLarge(normal_large_ptr)diffnormals_estimator.setNormalScaleSmall(normal_small_ptr)
- 初始化计算:
diffnormals_estimator.initcompute() - 计算点云法向量:
diffnormals_estimator.computeFeature(*out_cloud_ptr)- 更新
out_cloud_ptr中的法线和曲率,其数据类型为:PointNormal
- 更新
-
构建点云条件滤波对象:
pcl::ConditionalRemoval-
构建滤波条件对象:
pcl::ConditionOr -
构建条件滤波(点云曲率大于0.5保留):
range_cond->addComparison(pcl::FieldComparison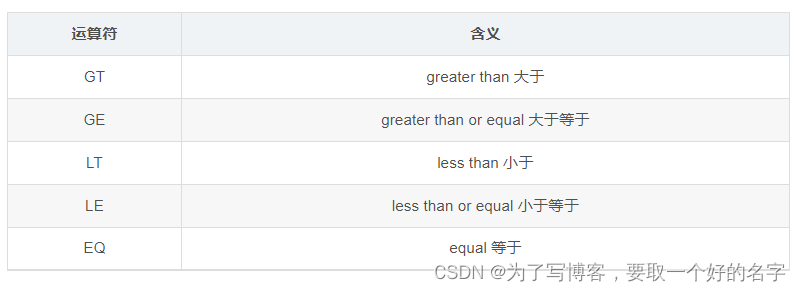
-
-
点云数据复制
pcl::PointCloud- 1
- 2
-
-
-
-
点云欧式聚类,获得聚类信息
-
简述欧式聚类原理:
- 构建点云空间的KD树,便于后续点云半径邻域搜索
- 随机选取点云空间内的某个点云p1作为初始点,并以该点云p1为中心进行半径(人为设定)邻域搜索,获得领域点云集合P1
- 在点云集合P1中去除点云p1,再随机挑选一个点云p2进行邻域搜索,获得邻域点云集合P2,并将P2集合中有而P1集合中没有的点云补充到P1集合中,即 P 1 = P 1 ∪ P 2 P1=P1\cup P2 P1=P1∪P2,P1不断扩大。
- 不断循环上述3步骤,直到遍历完P1集合中的所有点云,此时点云集合P1即为聚类得到的某个物体。
- 重新在点云空间中随机选取某个不属于点云集合P1的点云,进行上述步骤2、3、4,获得聚类物体。
- 当点云空间中没有单独的点云时,聚类结束,完成点云聚类。
-
实际流程:
-
获取点云的二维信息,即x,y坐标,进行二维空间的点云欧式聚类
-
利用二维空间的点云聚类结果找到对应的三维点云,即不考虑点云z坐标,只要点云(x,y)坐标属于一个聚类物体,那个该三维点云就属于同一个聚类物体。
- 从该部分可以看出3D聚类的结果存在瑕疵。如果现有两个物体,其(x,y)坐标相同,而高度z不同,按照该方法聚类,只会聚成一个物体,后续需改进
-
根据聚类物体的三维点云坐标获取聚类物体的信息
-
聚类物体的长宽高
- 长:length = max_x - min_x
- 宽:width = max_y - min_y
- 高:height = max_z - min_z
-
聚类物体的顶点
-
注:聚类结果显示为矩形。上下顶点只有Z坐标不同(只需求出上顶点或下顶点即可)
-
上下顶点的计算使用凸包算法获得
-
利用凸包算法获得聚类物体在二维平面中的凸点,如下所示,即将最外层点连接
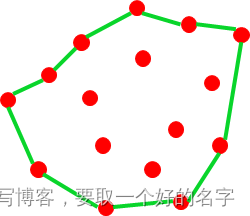
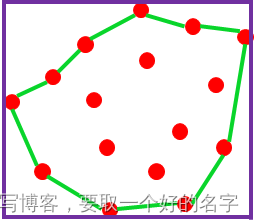
-
根据上述凸包,计算凸包的最小内接矩形,得到如下图所示,则紫色矩形的4个顶点,即为聚类物体的顶点,加上高度信息,即得到了聚类物体的8个顶点。
-
-
-
聚类物体的姿态
- 类物体的姿态等于聚类物体相对于激光雷达坐标系的偏航角
-
利用凸包算法计算得到内接矩阵的angle,如下图所示,angle应该为 θ 1 \theta_1 θ1.angle选择两个角度中绝对值较小的角度
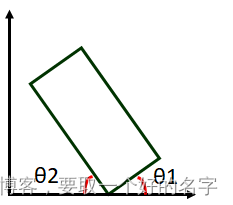
-
创造聚类物体的四元数
tf::createQuaternionFromRPY(0.0, 0.0, θ1),完成聚类物体的姿态获取
-
-
-
-
将过近的聚类物体合并成一个聚类物体
- 合并流程:
- 第一次合并:
- 计算聚类物体的质心
- 如果两个质心的距离小于一定阈值,则将两个质心对应的聚类物体合并
- 第二次合并:
- 重复第一次合并操作
- 第一次合并:
- 两次合并的原因:防止第一次合并后出现物体过近的情况
- 合并流程:
-
输出聚类结果,完成点云3D聚类
-
-
相关阅读:
《MySQL高级篇》十六、主从复制
vuepress 配置文件分类管理
企业如何成功完成云迁移?
国科大课程自动评价脚本JS
linux-文件权限
kubernetes布署方式介绍
每日刷题巩固知识
C++ 教程(04)---- 注释
uni-app 应用名称 跟随系统语言 改变
力扣(LeetCode)259. 较小的三数之和(2022.09.16)
- 原文地址:https://blog.csdn.net/cxkyxx/article/details/127951737