-
Xavier(8):Xavier使用速腾聚创激光雷达运行a-loam算法部分报错与解决方案
文章目录
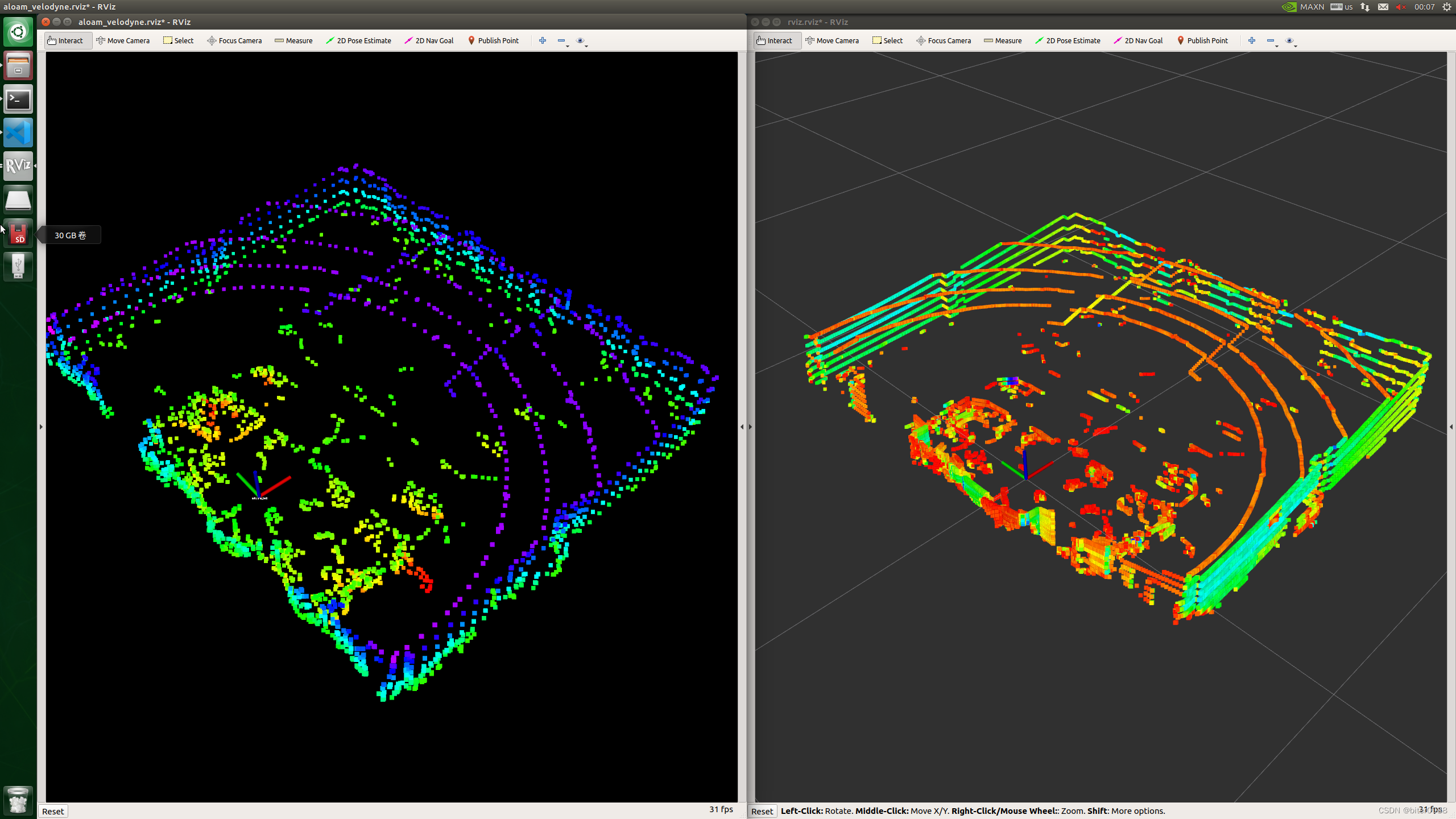
左边是a-loam效果,右边是激光雷达点云。
本机使用Nvidia xavier镜像,为ubuntu18.04、ros-melodic、opencv4
a-loam经过简单的源码修改可以适用于opencv4.x1 速腾聚创激光雷达驱动
报错:Project ‘cv_bridge’ specifies ‘/usr/include/opencv’ as an include dir
CMake Error at /opt/ros/melodic/share/cv_bridge/cmake/cv_bridgeConfig.cmake:113 (message): Project 'cv_bridge' specifies '/usr/include/opencv' as an include dir, which is not found. It does neither exist as an absolute directory nor in '${{prefix}}//usr/include/opencv'.- 1
- 2
- 3
- 4
参考:https://blog.csdn.net/qq_53627591/article/details/126116822
原因是:NVIDIA xaiver的镜像image自带的是opencv4版本,下面把opencv命名成了opencv4
sudo gedit /opt/ros/melodic/share/cv_bridge/cmake/cv_bridgeConfig.cmake
修改前if(NOT "include;/usr/include;/usr/include/opencv " STREQUAL " ") set(cv_bridge_INCLUDE_DIRS "") set(_include_dirs "include;/usr/include;/usr/include/opencv")- 1
- 2
- 3
修改后
if(NOT "include;/usr/include;/usr/include/opencv4 " STREQUAL " ") set(cv_bridge_INCLUDE_DIRS "") set(_include_dirs "include;/usr/include;/usr/include/opencv4")- 1
- 2
- 3
下面这个报错在其他程序里面出现,在编译速腾聚创激光雷达驱动没有出现,此处作为参考
Project ‘grid_map_cv’ specifies ‘/usr/include/opencv’ as an include dir
CMake Error at /opt/ros/melodic/share/grid_map_cv/cmake/grid_map_cvConfig.cmake:113 (message): Project 'grid_map_cv' specifies '/usr/include/opencv' as an include dir, which is not found. It does neither exist as an absolute directory nor in '${{prefix}}//usr/include/opencv'. Check the issue tracker 'http://github.com/anybotics/grid_map/issues' and consider creating a ticket if the problem has not been reported yet.- 1
- 2
- 3
- 4
- 5
- 6
修改上面报错的第一行中的文件的94行和96行,将opencv替换为opencv4:
修改前if(NOT "include;/usr/include;/usr/include/opencv " STREQUAL " ") set(grid_map_cv_INCLUDE_DIRS "") set(_include_dirs "include;/usr/include;/usr/include/opencv")- 1
- 2
- 3
修改后
if(NOT "include;/usr/include;/usr/include/opencv4 " STREQUAL " ") set(grid_map_cv_INCLUDE_DIRS "") set(_include_dirs "include;/usr/include;/usr/include/opencv4")- 1
- 2
- 3
2 a-loam算法
报错: fatal error: opencv/cv.h: 没有那个文件或目录
xx/src/A-LOAM/src/draw_boxes.cpp:7:10: fatal error: opencv/cv.h: 没有那个文件或目录 #include- 1
- 2
修改
#include为#include报错:error: ‘CV_LOAD_IMAGE_GRAYSCALE’ was not declared in this scope
error: ‘CV_LOAD_IMAGE_GRAYSCALE’ was not declared in this scope cv::Mat left_image = cv::imread(left_image_path.str(), CV_LOAD_IMAGE_GRAYSCALE);- 1
- 2
参考:https://blog.csdn.net/weixin_41560777/article/details/124138138
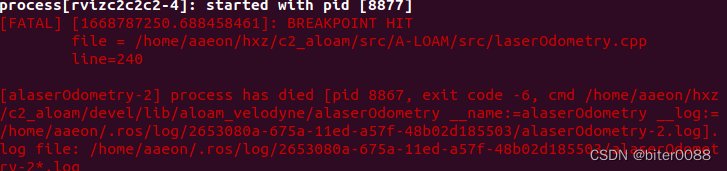
找到对应的kittiHelper.cpp文件,将91行与93行的CV_LOAD_IMAGE_GRAYSCALE改为cv::IMREAD_GRAYSCALE报错:[FATAL] [1668787250.688458461]: BREAKPOINT HIT
先启动速腾雷达驱动
roslaunch rslidar_sdk start.launch,后启动a-loamroslaunch aloam_velodyne aloam_velodyne_VLP_16_c2.launch[FATAL] [1668787250.688458461]: BREAKPOINT HIT file = /home/aaeon/hxz/c2_aloam/src/A-LOAM/src/laserOdometry.cpp line=240 [alaserOdometry-2] process has died [pid 8867, exit code -6, cmd /home/aaeon/hxz/c2_aloam/devel/lib/aloam_velodyne/alaserOdometry __name:=alaserOdometry __log:=/home/aaeon/.ros/log/2653080a-675a-11ed-a57f-48b02d185503/alaserOdometry-2.log]. log file: /home/aaeon/.ros/log/2653080a-675a-11ed-a57f-48b02d185503/alaserOdometry-2*.log- 1
- 2
- 3
- 4
- 5
- 6
根据报错查看
/home/aaeon/hxz/c2_aloam/src/A-LOAM/src/laserOdometry.cpp240行左右内容,怀疑是时间戳问题if (timeCornerPointsSharp != timeLaserCloudFullRes || timeCornerPointsLessSharp != timeLaserCloudFullRes || timeSurfPointsFlat != timeLaserCloudFullRes || timeSurfPointsLessFlat != timeLaserCloudFullRes) { printf("unsync messeage!"); ROS_BREAK(); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
先启动启动a-loam
roslaunch aloam_velodyne aloam_velodyne_VLP_16_my.launch,后启动速腾雷达驱动roslaunch rslidar_sdk start.launch则不会报错,且会正常运行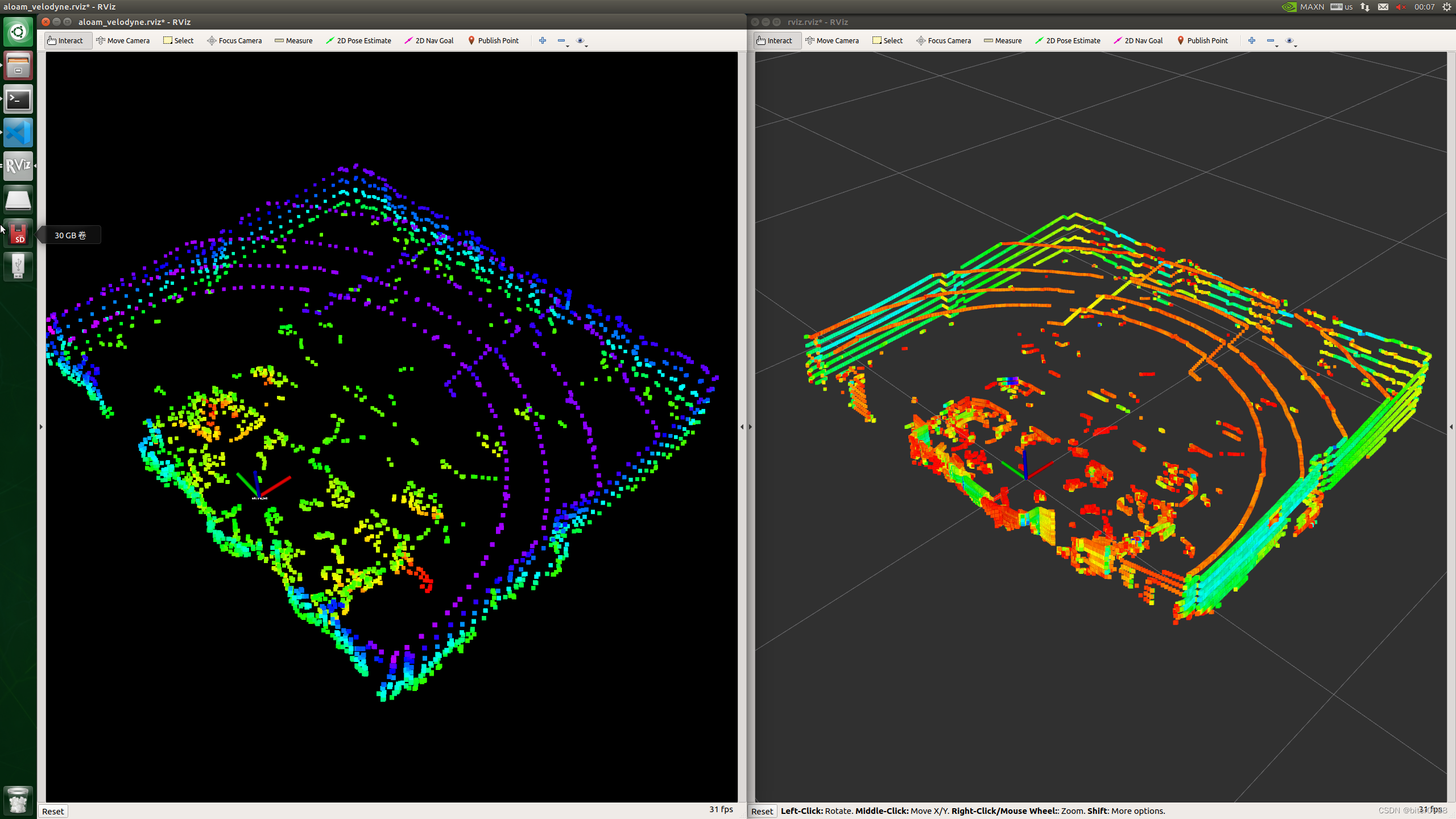
-
相关阅读:
魔众文库系统 v3.5.0 预览页数调整,批量操作命令,多处优化
工业控制系统面临的安全问题分析
LuatOS-SOC接口文档(air780E)-- fota - 底层固件升级
Spring学习之注解@Autowired、@Qualifier、@Resource
【Linux初阶】vim工具的使用 | vim配置 | sudo提权指令配置
steam搬砖,长期稳定副业,附防坑指南助你不掉坑
Linux篇【5】:Linux 进程概念(上)
最近公共祖先(LCA)在线做法
NeRF-VAE:将场景看作一个分布【ICML‘2021】
在网络隔离下实现文件传输交换,你的方式真的安全吗?
- 原文地址:https://blog.csdn.net/BIT_HXZ/article/details/127937738