-
ROS 开源项目 TurtleBot3 安装与使用
功能介绍
- 启动slam完成地图的搭建与保存
- 启动navigation并读取保存的地图,完成自动导航。
注:人工咨询
如果按照下面方案也无法成功解决,可以进入我淘宝咨询,可进行远程辅助解决。
1、安装部分
1.1 创建工作空间
lee_wsmkdir -p ~/lee_ws/src cd ~/lee_ws/src/ catkin_init_workspace cd ~/lee_ws/ catkin_make echo "source ~/lee_ws/devel/setup.bash" >> ~/.bashrc source devel/setup.bash- 1
- 2
- 3
- 4
- 5
- 6
- 7
1.2 安装
TurtleBot3 Simulationcd ~/lee_ws/src/ git clone https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git cd ~/lee_ws catkin_make- 1
- 2
- 3
- 4
1.3 安装
TurtleBot3cd ~/lee_ws/src/ git clone https://github.com/ROBOTIS-GIT/turtlebot3.git cd ~/lee_ws catkin_make- 1
- 2
- 3
- 4
1.4 安装相关依赖
sudo apt-get install ros-noetic-turtlebot3-bringup -y sudo apt-get install ros-noetic-turtlebot3-msgs -y sudo apt-get install ros-noetic-gazebo-ros -y sudo apt install ros-noetic-gazebo-ros-pkgs -y sudo apt install ros-noetic-gazebo-ros-control -y sudo apt-get install ros-noetic-rviz -y sudo apt-get install ros-noetic-map-server -y sudo apt install ros-noetic-gmapping -y sudo apt install ros-noetic-navigation -y sudo apt install ros-noetic-move-base -y sudo apt install ros-noetic-navigation -y- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
1.5设置机器人模型
该开源项目一共有两个机器人模型,分别为:
burger和waffle
在实验中,任意选择一个模型即可,效果一样。echo "export TURTLEBOT3_MODEL=waffle" >> ~/.bashrc- 1
2、实验部分
- 启动slam完成地图的搭建与保存
- 启动navigation并读取保存的地图,完成自动导航。
2.1 地图的搭建与保存
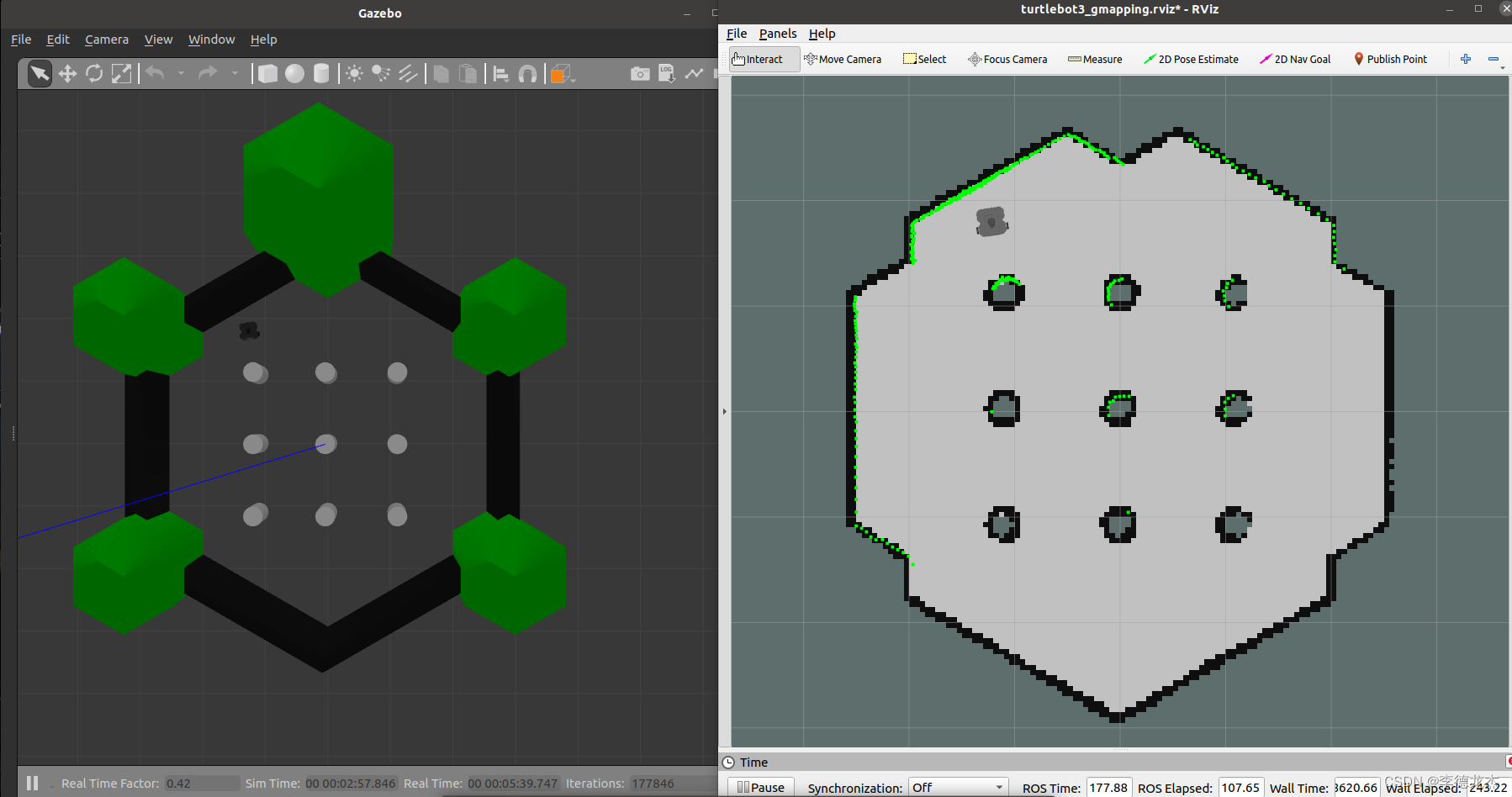
2.1.1 启动gazebo可视化界面
roslaunch turtlebot3_gazebo turtlebot3_world.launch- 1
2.1.2 启动slam地图建模
roslaunch turtlebot3_slam turtlebot3_slam.launch- 1
2.1.3 启动键盘控制
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch- 1
利用键盘控制,将地图搭建完成,效果如下:
2.1.4 保存地图
rosrun map_server map_saver -f ~/map- 1
2.2 读取地图,完成自动导航
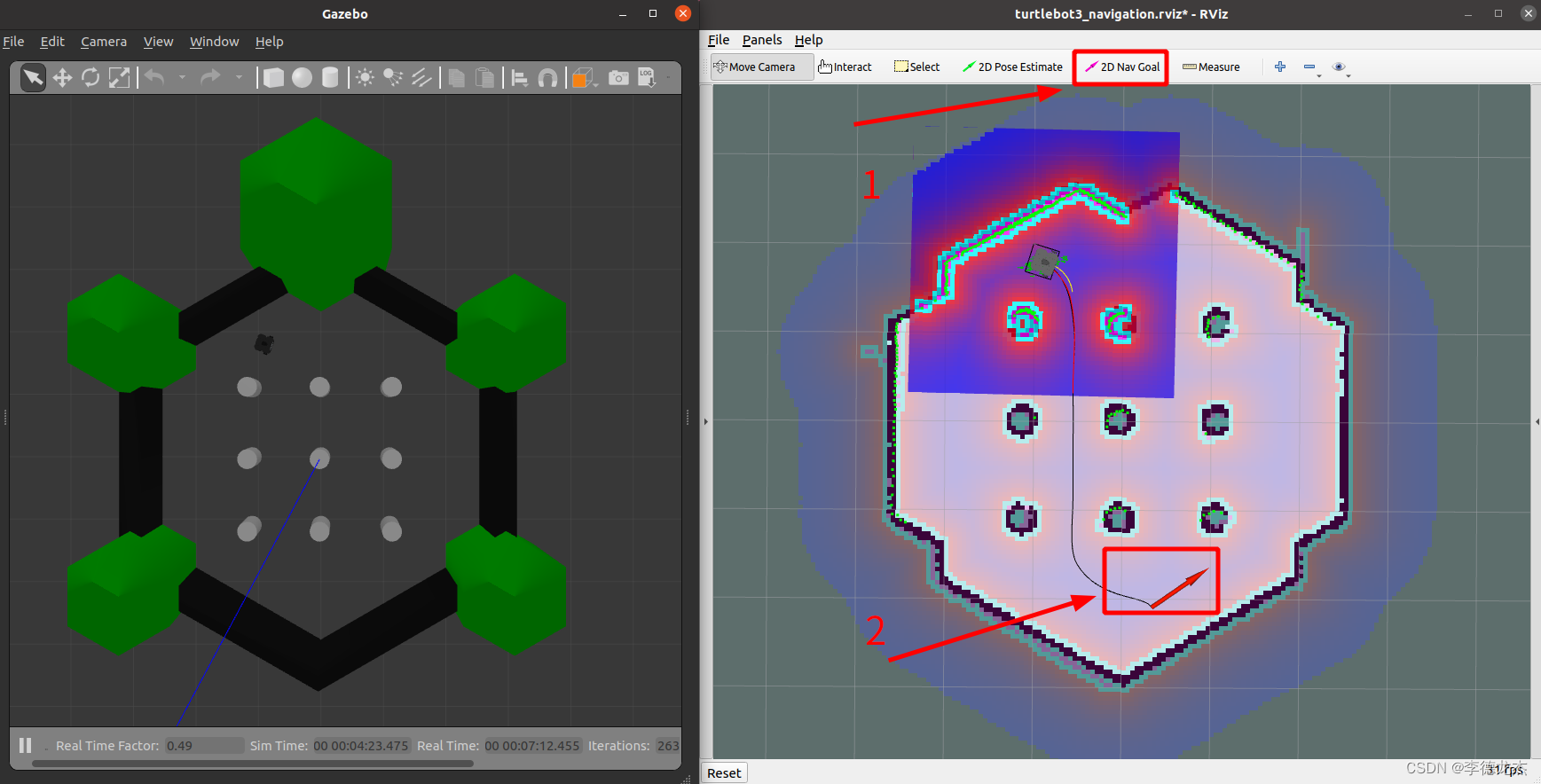
2.2.1 启动gazebo可视化界面
roslaunch turtlebot3_gazebo turtlebot3_world.launch- 1
2.2.2 读取地图,校准地图
roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=$HOME/map.yaml- 1
校准地图,鼠标左键点击1,然后点击2,箭头朝向与2同向。

2.2.3 完成导航
鼠标左键点击1,然后点击2,箭头朝向为机器人最终停止的朝向。
-
相关阅读:
请求转发与请求重定向的区别
list的特性及使用
微服务实战 05 分布式事务 入门
【Matplotlib绘制图像大全】(十九):Matplotlib绘制等高线
阿里巴巴面试题- - -多线程&并发篇(二十三)
13.Pandas怎么实现DataFrame的Mergee
职称评审的业绩要求,余老师为人才讲讲都需要符合什么条件的业绩
Revit中如何运用贴花呢及revit构件万能刷操作
漏洞管理流程
13 双口 RAM IP 核
- 原文地址:https://blog.csdn.net/weixin_44692299/article/details/127908302