-
STM32 BSRR BRR ODR 寄存器解析(F4系列已经去掉BRR寄存器了)
STM32 BSRR BRR ODR 寄存器解析(F4系列已经去掉BRR寄存器了)
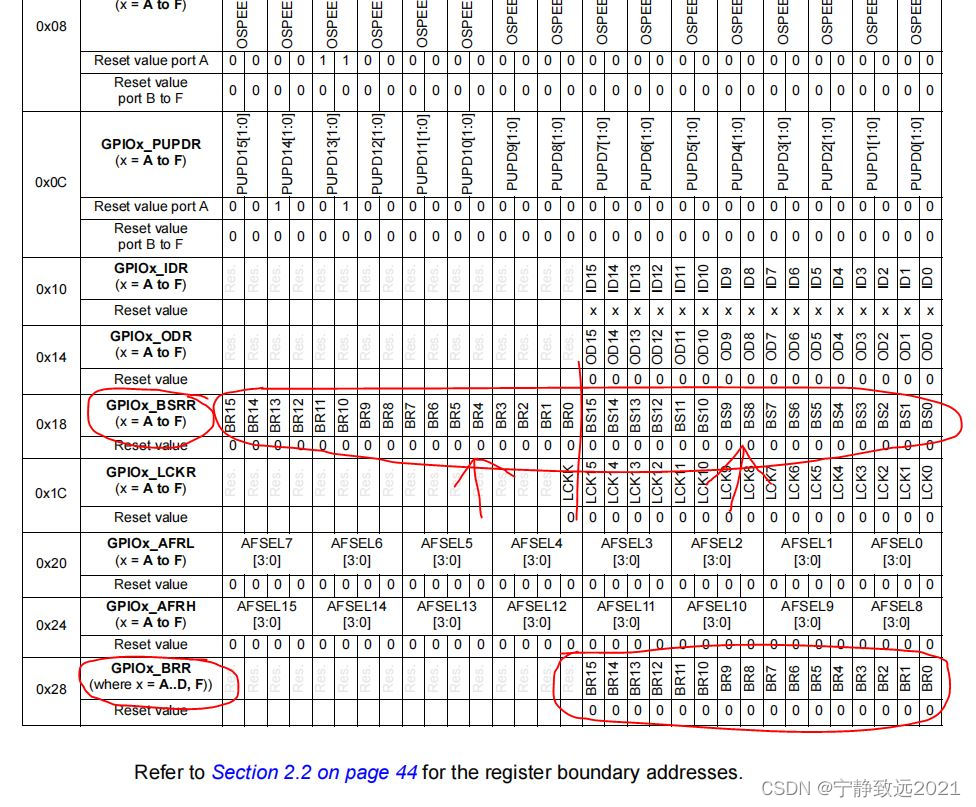
G0x0系列GPIO寄存器
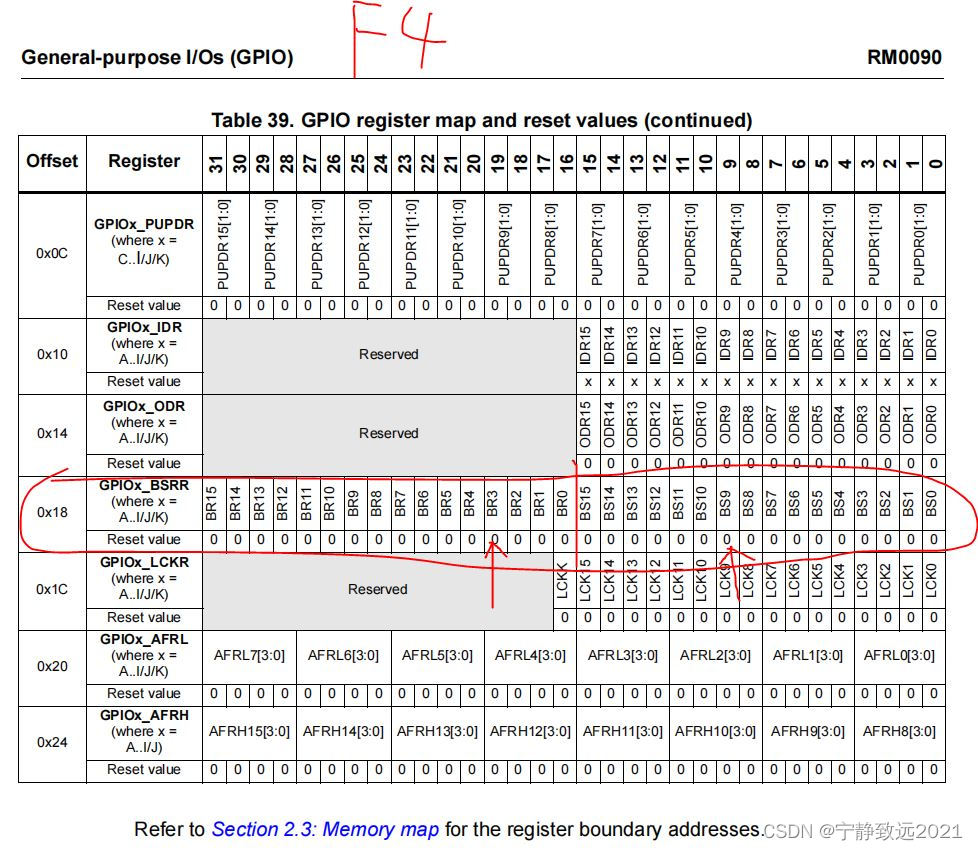
F4系列GPIO寄存器(没有BRR寄存器了)
一、用法
经常会看到类似如下的宏定义语句,用于对已经初始化后的 IO 口输出高、低电平。
#define SET_BL_HIGH() GPIOA->BSRR=GPIO_Pin_0 #define SET_BL_LOW() GPIOA->BRR=GPIO_Pin_0- 1
- 2
其作用类似于如下两个库函数,
void GPIO_SetBits(GPIO_Typedef* GPIOx, uint16_t GPIO_Pin) void GPIO_ResetBits(GPIO_Typedef* GPIOx, uint16_t GPIO_Pin)- 1
- 2
而且实际上这两个库函数就是通过修改BSRR,BRR寄存器的值来实现对 IO 口设置的。如下便是输出高电平的函数体:
void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin) { /* Check the parameters */ assert_param(IS_GPIO_ALL_PERIPH(GPIOx)); assert_param(IS_GPIO_PIN(GPIO_Pin)); GPIOx->BSRR = GPIO_Pin; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
因此,使用宏或者库函数本质上都是一样的。区别在于使用宏更快,而使用函数更灵活。
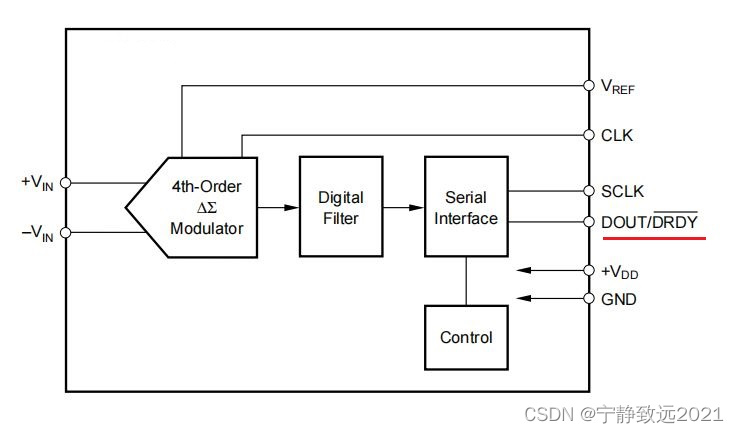
注意:在要求速度/时序的更快更严格的场合(模拟I2C,模拟SPI,Σ-∆ADC中DOUT/RDRY同一引脚等情况的),建议使用宏定义操作IO口对应的引脚。
#define IN1() {GPIOA->MODER&=0XFF3FFFFF;} //PA11 #define OUT1() {GPIOA->MODER&=0XFF3FFFFF;GPIOA->MODER|=0X00400000;} #define IN2() {GPIOA->MODER&=0XFFF3FFFF;}//PA9 #define OUT2() {GPIOA->MODER&=0XFFF3FFFF;GPIOA->MODER|=0X00040000;} #define DRDY1 (GPIOA->IDR)&(uint16_t)0x0800 #define DRDY2 (GPIOA->IDR)&(uint16_t)0x0200- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
二、解释
BSRR 和 BRR 都是 STM32 系列 MCU 中 GPIO 的寄存器。 BSRR 称为端口位设置/清楚寄存器,BRR称为端口位清除寄存器。
BSRR 低 16 位用于设置 GPIO 口对应位输出高电平,高 16 位用于设置 GPIO 口对应位输出低电平。
BRR 低 16 位用于设置 GPIO 口对应位输出低电平。高 16 位为保留地址,读写无效。
所以理论上来讲,BRR 寄存器的功能和 BSRR 寄存器高 16 位的功能是一样的。也就是说,输出低电平的宏语句,可以有如下两种写法。
#define SET_BL_LOW() GPIOA->BRR=GPIO_Pin_0 等价于 #define SET_BL_LOW() GPIOA->BSRR=GPIO_Pin_0 << 16- 1
- 2
- 3
这么来看的话,其实 BRR 寄存器是比较多余的。而实际上,在最新的 STM32F4 系列 MCU 的 GPIO 寄存器中,已经找不到 BRR 寄存器了,仅保留了 BSRR 寄存器用于实现端口输出高低电平。因此,在 STM32F4 系列 MCU 的 HAL 库函数中,对 GPIO 口输出高低电平的函数为如下形式:
void HAL_GPIO_WritePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState) { /* Check the parameters */ assert_param(IS_GPIO_PIN(GPIO_Pin)); assert_param(IS_GPIO_PIN_ACTION(PinState)); if(PinState != GPIO_PIN_RESET) { GPIOx->BSRR = GPIO_Pin; } else { GPIOx->BSRR = (uint32_t)GPIO_Pin << 16U; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
而早期 ST 的标准库 std 中,关于 GPIO 口输出高低电平的函数为如下形式,里面通过两个16位的指针分别指向 BSRR 的高16位和低16位。
typedef struct { __IO uint32_t MODER; /*!< GPIO port mode register, Address offset: 0x00 */ __IO uint32_t OTYPER; /*!< GPIO port output type register, Address offset: 0x04 */ __IO uint32_t OSPEEDR; /*!< GPIO port output speed register, Address offset: 0x08 */ __IO uint32_t PUPDR; /*!< GPIO port pull-up/pull-down register, Address offset: 0x0C */ __IO uint32_t IDR; /*!< GPIO port input data register, Address offset: 0x10 */ __IO uint32_t ODR; /*!< GPIO port output data register, Address offset: 0x14 */ __IO uint16_t BSRRL; /*!< GPIO port bit set/reset low register, Address offset: 0x18 */ __IO uint16_t BSRRH; /*!< GPIO port bit set/reset high register, Address offset: 0x1A */ __IO uint32_t LCKR; /*!< GPIO port configuration lock register, Address offset: 0x1C */ __IO uint32_t AFR[2]; /*!< GPIO alternate function registers, Address offset: 0x20-0x24 */ } GPIO_TypeDef; void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin) { /* Check the parameters */ assert_param(IS_GPIO_ALL_PERIPH(GPIOx)); assert_param(IS_GPIO_PIN(GPIO_Pin)); GPIOx->BSRRL = GPIO_Pin; } void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin) { /* Check the parameters */ assert_param(IS_GPIO_ALL_PERIPH(GPIOx)); assert_param(IS_GPIO_PIN(GPIO_Pin)); GPIOx->BSRRH = GPIO_Pin; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
可见,不管是输出高还是输出低,都是对 BSRR 寄存器的操作。
三、BSRR、BRR、 ODR 之间的关系
配置 BSRR , BRR 是为了对端口输出进行配置,而 ODR 寄存器也是用于输出数据的寄存器,一个 ODR 寄存器控制了一组(16位)的 GPIO 输出。因此,对 ODR 进行修改也可以到达对 IO 口输出进行配置。
但是,由于对 ODR 寄存器的读写操作必须以 16 位的形式进行。因此,如果使用 ODR 改写数据以控制输出时,须采用“读-改-写”的形式进行。
假设需要对 GPIOA_Pin_6 输出高电平。采用改写 ODR 寄存器的方式时,使用“读-改-写”操作,代码如下:
uint32_t temp; temp = GPIOA->ODR; temp = temp | GPIO_Pin_6; GPIOA->ODR = temp;- 1
- 2
- 3
- 4
这是因为在修改 ODR 时,为了确保对端口 6 的修改不会影响到其他端口的输出,需要对端口的原始数据进行保存,之后再对端口 6 的值进行修改,最后再写入寄存器。而对 BSRR 的操作,是写 1 有效,写 0 不改变原状态,因此可以对端口 6 置 1,其他位保持为 0。BSRR 为 1 的位,会修改相应的 ODR 位,从而控制输出电平。
对 BSRR 的操作可以实现原子操作。因此在设置单个 IO 口输出时,使用 BSRR 进行操作会更加方便。
但也有例外的时候,在需要对单个IO口进行 Toggle 操作时(即对当前输出取反输出,当前输出为高则输出低,当前输出低则输出高),官方的库函数就是直接对 ODR 寄存器进行操作的。代码如下:
void HAL_GPIO_TogglePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin) { /* Check the parameters */ assert_param(IS_GPIO_PIN(GPIO_Pin)); GPIOx->ODR ^= GPIO_Pin; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
原文链接:https://blog.csdn.net/u011303443/article/details/76514537
-
相关阅读:
QT QWT配置环境和运行
火山引擎 ByteHouse:如何提升 18000 节点的 ClickHouse 可用性?
Jackson多态序列化
计算方法/数值分析 期末复习整理
DBeaver报错:can‘t load driver class ‘com.mysql.cj.jdbc.Driver‘
Hello Vue!
哈佛积极心理学
猿创征文|【简单】微信公众号推送教程 ·可直接下载运行 ·超详细
70. 爬楼梯
Qt中的基础数据类型
- 原文地址:https://blog.csdn.net/m0_46577050/article/details/127897059
