-
导航基础知识
术语
2D 2 Dimensions 二维
3D 3 Dimensions 三维
NDS(Navigation Data Standard)导航数据标准,是由汽车制造商和供应商联合发展创建的汽车等级导航数据库标准格式。
AE:autonavi engine amap引擎
AL:adaptor layer 适配层
AOS:autonavi online service amap线上服务
GPS:Global Positioning System 全球定位系统
Overlay:地图图层
图元 图元是图面绘制(点、线、面等)的最小元素,支持自定义位置、纹理、点击响应等基本能力。
POI:Point of Interest 兴趣点(地图上某经纬度上的地理信息)
TMC:Traffic Message Channel 交通实时信息频道
TTS:Text To Speech 文本到语音
ODD:Operational Design Domain 运行设计域,在算路时候开启ODD功能是用于显示该路段是否可进行自动驾驶路段。开启ODD功能后,SDK内部会以算路形式发起ODD请求,并透出ODD应答结果给HMI。
WGS84:World Geodetic System 1984 全球测量系统。一种国际上采用的地心坐标系,坐标原点为地球质心。GPS芯片或者北斗芯片获取的经纬度一般为WGS84坐标系。
GCJ02:(G国家C测绘J局)制订的地理信息系统的坐标系统。一种对经纬度数据的加密算法,即加入随机的偏差。可以将GCJ02理解成是由WGS84坐标系经某些规则加密后的坐标系。
GNSS:Global Navigation Satellite System 全球导航卫星系统 BDS、GPS、GLONASS、GALILEOAR:Augmented Reality 增强现实技术
AR导航是利用摄像头将前方道路的真实场景实时捕捉下来,结合当前定位、地图导航信息以及场景AI识别,进行融合计算,然后生成虚拟的导航指引模型,叠加在真实的道路上,从而创建出更贴近驾驶者真实视野的导航画面。
ADAS:Advanced Driver Assistant System 高级驾驶辅助系统
利用车上传感器,感应环境,预先让驾驶者察觉到可能发生的危险,有效提升汽车驾驶的安全性、经济性和舒适性。ADAS并不是一项配置,而是几项配置结合使用组成的系统。
ADAS是辅助驾驶,核心是环境感知,而自动驾驶则是人工智能。ADAS实现的是第3级,而自动驾驶实现的是第4级。从第3级发展到第4级需要更多的汽车上配有自动驾驶技术,而且配合道路基础设施建设(道路上的摄像头,清晰的车道线),以及汽车互联,汽车手机互联等非常庞大的工程。
EHP:Electronic Horizon Provider 电子地平线提供者,为ADAS应用提供超视距前方路形和数据信息。

ACC:Adaptive Cruise Control 自适应巡航控制系统
DR:Dead Reckoning 航位推算。在车载导航中,航位推算是使用先前确定的位置,通过测量移动的距离和方位,计算出经过的时间后的位置。航位推算受误差累积影响,即随着时间的推移,推算出的位置误差会越来越大,需要使用GNSS位置修正。分为前端融合和后端融合。SAPA:Server Area / Parking Area 服务区、停车场
ETA:Estimated Time of Arrival 预计到达时间
UR:Update Region 一个地区的一个区域
tile: 为了减少每层道路加载的数据量,还需要进行分块处理。在NDS数据中数据是以tile为单位来进行存储的。
UR ID:区域划分id,一般按行政区划划。例如1100为北京。
Tile ID:地理划块id,块索引和分层id组成。通过指定地点的经纬度和level层号计算Tile Id。
Link ID:link的索引
墨卡托投影:正轴等角圆柱投影。由荷兰地图学家墨卡托于1569年创立。假想一个与地轴方向一致的圆柱切或割于地球,按等角条件,将经纬网投影到圆柱面上,将圆柱面展为平面后,即得本投影
接续算路:当电量不足以到达目的地时,自动为用户添加充电桩,算出可以到达目的地的路。路网数据
Road Network由Link(类似于道路)和Node(类似于路口)组成的网状数据。
NDS分层数据:实际的路网数据非常大,出于性能和品质考虑,一般路网数据都是分层存储。NDS中一般分5层:13,11,9,7,5。13层包含完整的路网,5层只包含高速和国道。
道路网数据等级Level,Level编号越大,道路网的内容越详细。level13 -> level11称为升层
NDS数据:NDS是由地图显示、道路规划、POI、名称、交通信息、语音表达等组成的一个SQLite数据库,每一部分对应着一系列的SQLite表结构。
baselink:在一个tile之中的link
routelink:跨过多个tile,由多个geolink组成
geolink:routelink在一个tile之中的那部分link
routelink只存在其中的一个tile,geolink分别存在各自的tileNDS坐标变换为 WGS84坐标 :90.0 / (1 << 30)
坐标系编码,应用一个缩放因子,使360°完全覆盖32位整型。NDS中一个坐标单位等于经度或纬度的90/2的30次方度。算路
行前:开始导航前的时段;行中:开始导航后、结束导航前的时段
路径规划:在路网中从CCP到目的地探索代价最小的路径(最优路径)。包含绑定和探索。绑定
在level13层查找距离当前选点位置(CCP,途经地,目的地)最近的道路的过程。
探索
包括升层探索,连接层探索,回溯三个过程。
升层探索
1.在探索过程中查找当前层中满足升层条件的点,当升层点达到一定数量时,进行升层处理。
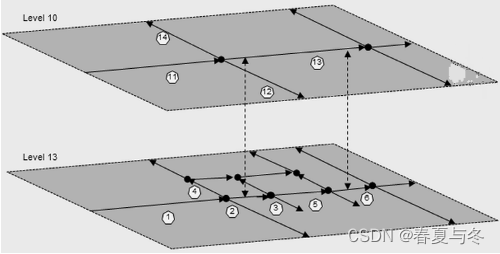 升层点
升层点
level13层的link 3的始点能够升到level10,对应的点为link13的始点。
level13层的link 6的终点能够升到level10,对应的点为link13的终点。
2.通过计算两点间的直线距离,各层Tile的跨度范围,比较两者的关系来确定最多升到哪一层。
3.升层探索过程中,如果升层点过少会导致路径规划结果不合理,出现绕远或无法到达的情况。如果升层点过多,在下层探索使用的内存和时间消耗就会增加。
连接层探索:在探索的最高层用于连通径路的探索过程。
回溯:将满足探索条件的最优路径,道路相遇之后,从始点到终点编辑径路上各个Link属性的过程。
道路探索(有向图探索)过程中包括两个基本动作:
1.查找顶点连接的所有边
2.查找边上的下一个顶点常用的算路模式包括:
最短: 距离最短,代价以路线长度为主
最快: 时间最短,代价以行驶时间为主
推荐: 综合模式,考虑道路易行驶,少转弯,路线简单等
ECO: 经济模式,以油量消耗/费用为主LinkCost:C(Ln)
C(Ln) = L * F * K * S * B * A * D * G * R
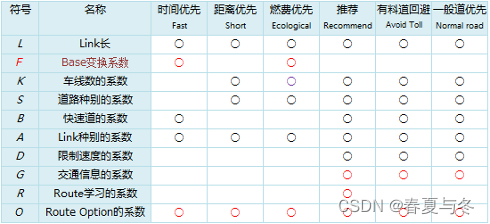
L link长
F Base变换系数
Fast模式:1 /基准车速[km/h] / 1000 * 3600
经济模式:从Link的道路类别、阻塞信息、坡度信息查表
K 车线数的系数 根据道路类型和车线查表
S 道路种别的系数 根据道路类型
B 快速道的系数 是否快速道
A link种别的系数 根据link类型
D 限制速度的系数 根据地图数据中存储的限制速度值与每个道路种别的默认值的比率来算出限制速度的系数 D = ( α / β - 1 ) * γ + 1
G 交通信息的系数 G = ( L - j ) + ( j * J )
R Route学习的系数
O Route Option的系数 用户设定是否走高速航道等NodeCostC(Nn)
C(Nn) = X + Y + Z + Z’
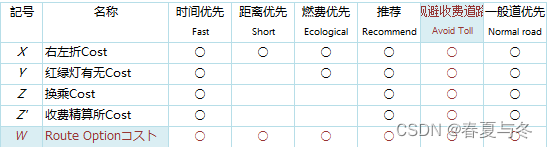
X 左右转Cost
Y 红绿灯有无Cost
Z 一种类型的道路到另一种类型的道路Cost
Z’ 非收费路到收费路的切换Cost引导
路口大图
栅格图(实景图)
实景图在每个路口唯一;旨在模拟真实场景,图片中可能会有路牌、真实楼块、真实桥梁等元素的建模。
栅格图(范式图)
一张范式图往往通用于多个路口;由固定的底图场景和上层箭头匹配生成,内容比较简单,没有路牌元素,与真实场景有一定差距。
矢量图
由在线/离线引擎根据路口形状实时绘制的图,不是图片;矢量图中还包含两种特殊的路口大图:混淆路口大图、近接路口大图。
三维实景图
根据真实场景建模而成的三维路口大图,主要出现在复杂的桥区和高架场景。定位
定位服务依据不同的定位模式,结合外部传入的信号信息,为车辆提供实时准确的位置呈现,目前有GNSS模式、后端融合、前端融合三种定位模式,GNSS 模式有纯 GNSS 模式和GNSS+脉冲车速模式。
纯 GNSS 模式只有GPS或其他卫星定位信号下的地图匹配模式。
GNSS+脉冲车速模式相对于纯GNSS模式增加了单独的车速脉冲信息输入,目前定位引擎对于车速脉冲的使用仅限于隧道推算场景。这种模式可以优化纯GNSS模式中隧道推算不准确的问题。融合信号是将GPS信号、陀螺仪、加速度计和脉冲等信息综合处理后得到的轨迹信号。
前端融合模式是指信号融合的工作是由系统方/硬件方负责的,定位引擎只负责地图匹配工作。定位引擎收到是类似于GPS信息的融合信号,所以整体的工作流程也是类似于纯GPS模式的。
后端融合模式是指融合信号的生成工作时在定位引擎内部实现的。对于定位引擎来说,后端融合模式的输入信息是GPS、陀螺仪、脉冲、加速度计等原始信号。
所谓“后端融合”是指惯导系统推算出的融合信号,是与地图数据和导航引擎通过通信协议紧密配合的,导航系统仅在汽车启动时使用GPS信号进行定位,车辆行驶过程中始终以惯导系统推算出的融合经纬度信息为主进行导航,只有当导航出现偏差时,才选用GPS信号精准时的数值进行实时校正,因此在失去GPS信号时仍能精准导航。惯导:惯性导航系统(INS,Inertial Navigation System)
以陀螺仪和加速度计为敏感器件的导航参数解算系统,该系统根据陀螺的输出建立导航坐标系,根据加速度计输出解算出运载体在导航坐标系中的速度和位置。 -
相关阅读:
笔试刷题Day—8
【机器学习300问】68、随机初始化神经网络权重的好处?
数位DP
python经典百题之水仙花数
win11电脑怎么设置定时关机
React+Mobx|基本使用、模块化
我做抖音小店无货源电商,2个月攒下16万!抖音电商真的好做吗?
《树上差分》小题两则
【图灵MySQL】Explain详解与索引最佳实践
对称加密和非对称加密以及CA证书
- 原文地址:https://blog.csdn.net/yangjinjingbj/article/details/127876805