-
根据两向量求旋转矩阵(C++)
Windows 10(64bits) + VMware 16 Pro + Ubuntu 20.04 + VS Code 2022
PCL 1.10 + Eigen3
一、库及VS code中的配置
1.1需要的库
PCL库
Eigen库1.2 VS Code配置
直接使用文本编辑器写代码的时候,库是由CMakeLists.txt进行链接的,但是用VS Code打开是,代码头文件中PCL库和Eigen库下面会有波浪线,像这样:
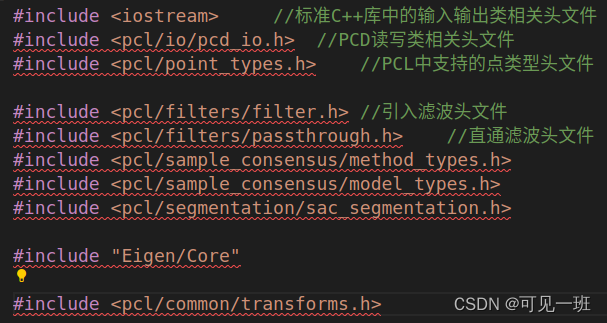
配置过程:
ctrl+shift+P——>C/C++:Edit Configuration中增加库的文件路径,库文件通常在/usr/include/中,或者对应上自己库的位置就可以。
这里要注意的是:
#include需要Eigen库的依赖,如果只添加了PCL库,这一条头文件还会有波浪线,可以自己试一下看看。 { "configurations": [ { "name": "Linux", "includePath": [ "${workspaceFolder}/**", "/usr/include/pcl-1.10", "/usr/include/eigen3" ], "defines": [], "compilerPath": "/usr/bin/gcc", "cStandard": "gnu17", "cppStandard": "gnu++14", "intelliSenseMode": "linux-gcc-x64" } ], "version": 4 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
二、求两向量旋转矩阵,并进行点云变换
旋转矩阵是33的,变换矩阵是44的,变换矩阵最后一列是平移向量。求两向量的旋转矩阵由Eigen完成,省去很多敲公式的时间。
//创建两个向量 Eigen::Vector3d VectorBefore(a, b, c); Eigen::Vector3d VectorAfter(x, y, z); //创建旋转矩阵、变换矩阵、位移向量 Eigen::Matrix3d rotationMatrix; Eigen::Matrix4d transformMatrix; transformMatrix.setIdentity(); Eigen::Vector3d t(0, 0, 0); //求两向量旋转矩阵 rotationMatrix = Eigen::Quaterniond::FromTwoVectors(VectorBefore, VectorAfter).toRotationMatrix(); //旋转矩阵和平移向量凑成变换矩阵 transformMatrix.block<3, 3>(0, 0) = rotationMatrix; transformMatrix.topRightCorner(3, 1) = t; //点云变换 pcl::transformPointCloud(*cloud_in, *cloud_out, transformMatrix);- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
Eigen库使用教程: C++矩阵库 Eigen 快速入门
-
相关阅读:
Python150题day01
第七讲(二):双指针,指针运用
系统性学习vue-vue3
2023年9月青少年机器人技术(三级)等级考试试卷-理论综合
电商平台图片相似度搜索怎么实现的?
vue 自适应页面高度
JSON和全局异常处理
DT Paint Effects工具(三)
大脑神经网络记忆原理图,记忆力机制的神经网络
Tailwindcss Layout布局相关样式及实战案例,5万字长文,附完整源码和效果截图
- 原文地址:https://blog.csdn.net/abanchao/article/details/127849012
