-
物联网开发笔记(45)- 使用Micropython开发ESP32开发板之控制红外传感器
一、目的
这一节我们学习如何使用我们的ESP32开发板来控制红外传感器。
二、环境
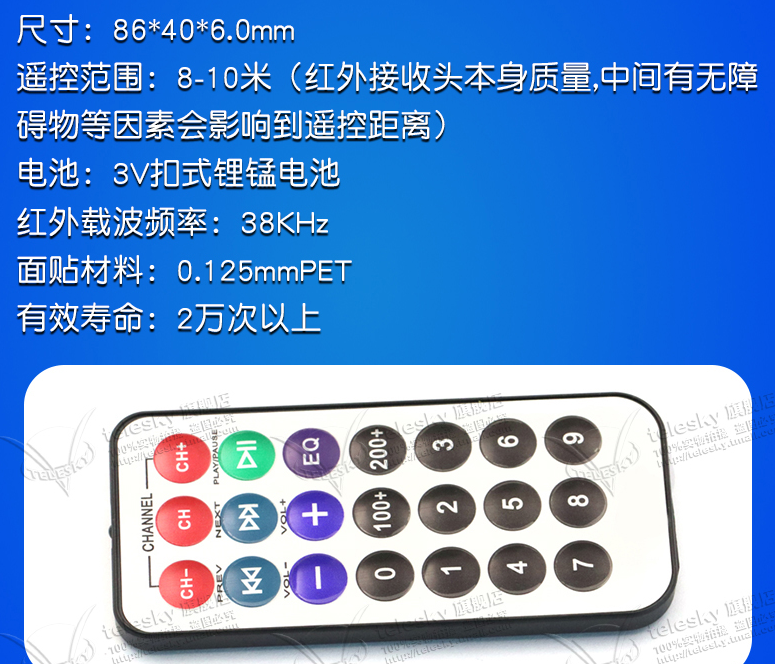
ESP32 + 红外传感器 + HX1838B红外接收模块 + Thonny IDE + 几根杜邦线
接线方法:
红外接收模块 接口说明(3线制)
1 VCC 外接开发板3.3V
2 GND 外接开发板GND
3 DO 小板数字量输出接口姐开发板IO口红外传感器介绍:
1 发送
当按下遥控器时,遥控器发出一帧数据(帧理解为完整的一次数据传输中的所有数据)
这一帧数据由前导码、用户码高8位、用户码低8位、数据码、数据反码组成

其中
- 前导码为
9ms高电平接着4.5ms低电平,标志数据帧的开始 - 用户码(共16位)为红外接收器识别遥控器的身份的标志,不同的遥控器一般用户码不同,以防止不同电器设备之间遥控码的干扰
- 数据码为红外接收器识别遥控器上不同的按键的标志,对同一遥控器来说,按不同的键所发出的二进制编码具有相同的用户码,不同的数据码
- 数据反码用于信息正确接收校验
- 以脉宽
0.56ms间隔0.565ms周期1.125ms表示二进制0;以脉宽0.56ms间隔1.69ms周期2.25ms表示二进制1
2 接收
解码就是将接收到脉冲还原为二进制的“0”和“1”,得到二进制“0”,“1”序列
三、代码
关于ESP32的官方介绍请查看:class Pin – control I/O pins — MicroPython latest documentation
- import machine
- import utime
- from machine import Pin
- class IR(object):
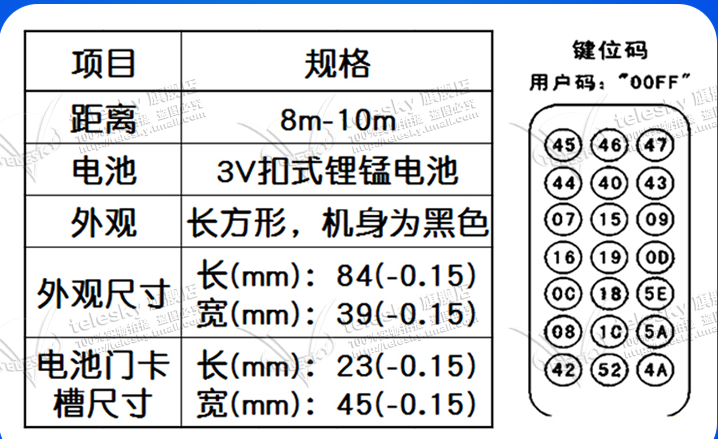
- CODE = {
- 162: "ch-", 98: "ch", 226: "ch+",
- 34: "prev", 2: "next", 194: "play/stop",
- 152: "0", 104: "*", 176: "#",
- 224: "-", 168: "+", 144: "EQ",
- 104: "0", 152: "100+", 176: "200+",
- 48: "1", 24: "2", 122: "3",
- 16: "4", 56: "5", 90: "6",
- 66: "7", 74: "8", 82: "9"
- }
- def __init__(self, gpioNum):
- self.irRecv = machine.Pin(gpioNum, machine.Pin.IN, machine.Pin.PULL_UP)
- self.irRecv.irq(trigger=machine.Pin.IRQ_RISING | machine.Pin.IRQ_FALLING, handler=self.__handler) # 配置中断信息
- self.ir_step = 0
- self.ir_count = 0
- self.buf64 = [0 for i in range(64)]
- self.recived_ok = False
- self.cmd = None
- self.cmd_last = None
- self.repeat = 0
- self.repeat_last = None
- self.t_ok = None
- self.t_ok_last = None
- self.start = 0
- self.start_last = 0
- self.changed = False
- def __handler(self, source):
- """
- 中断回调函数
- """
- thisComeInTime = utime.ticks_us()
- # 更新时间
- curtime = utime.ticks_diff(thisComeInTime, self.start)
- self.start = thisComeInTime
- if curtime >= 8500 and curtime <= 9500:
- self.ir_step = 1
- return
- if self.ir_step == 1:
- if curtime >= 4000 and curtime <= 5000:
- self.ir_step = 2
- self.recived_ok = False
- self.ir_count = 0
- self.repeat = 0
- elif curtime >= 2000 and curtime <= 3000: # 长按重复接收
- self.ir_step = 3
- self.repeat += 1
- elif self.ir_step == 2: # 接收4个字节
- self.buf64[self.ir_count] = curtime
- self.ir_count += 1
- if self.ir_count >= 64:
- self.recived_ok = True
- self.t_ok = self.start #记录最后ok的时间
- self.ir_step = 0
- elif self.ir_step == 3: # 重复
- if curtime >= 500 and curtime <= 650:
- self.repeat += 1
- def __check_cmd(self):
- byte4 = 0
- for i in range(32):
- x = i * 2
- t = self.buf64[x] + self.buf64[x+1]
- byte4 <<= 1
- if t >= 1800 and t <= 2800:
- byte4 += 1
- user_code_hi = (byte4 & 0xff000000) >> 24
- user_code_lo = (byte4 & 0x00ff0000) >> 16
- data_code = (byte4 & 0x0000ff00) >> 8
- data_code_r = byte4 & 0x000000ff
- self.cmd = data_code
- def scan(self):
- # 接收到数据
- if self.recived_ok:
- self.__check_cmd()
- self.recived_ok = False
- # 数据有变化
- if self.cmd != self.cmd_last or self.repeat != self.repeat_last or self.t_ok != self.t_ok_last:
- self.changed = True
- else:
- self.changed = False
- # 更新
- self.cmd_last = self.cmd
- self.repeat_last = self.repeat
- self.t_ok_last = self.t_ok
- # 对应按钮字符
- print(self.cmd)
- s = self.CODE.get(self.cmd)
- return self.changed, s, self.repeat, self.t_ok
- if __name__ == "__main__":
- t = IR(15)
- while(True):
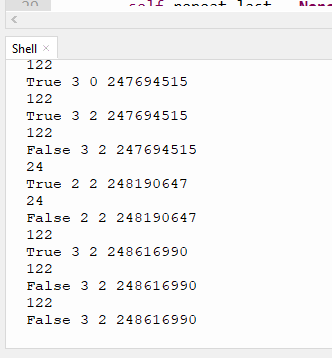
- changed, s, repeat, t_ok = t.scan()
- print(changed, s, repeat, t_ok)
- utime.sleep(0.3)
四、演示效果
- 前导码为
-
相关阅读:
QT5槽函数的重载问题
Fortran openmp并行打开多个文件
【每日思考】---成事的正确思维方式
【校招VIP】排序算法之高级排序
Elasticsearch系列之:Centos7安装部署Elasticsearch详细步骤
图解LeetCode——1796. 字符串中第二大的数字(难度:简单)
让Python更优雅更易理解
云原生主题学习月|共同学习全球领先的亚马逊云科技云原生课程,组团共学拿奖励~
Vulnhub靶场之matrix-breakout-2-morpheus
Visopsys 0.92 发布
- 原文地址:https://blog.csdn.net/zhusongziye/article/details/127833883
