使用的是沁恒的CH582M的Observer例程与官方的demo板。
本例程的功能是主机扫描到从机的MAC地址并打印出来。
先对宏定义进行理解讨论。
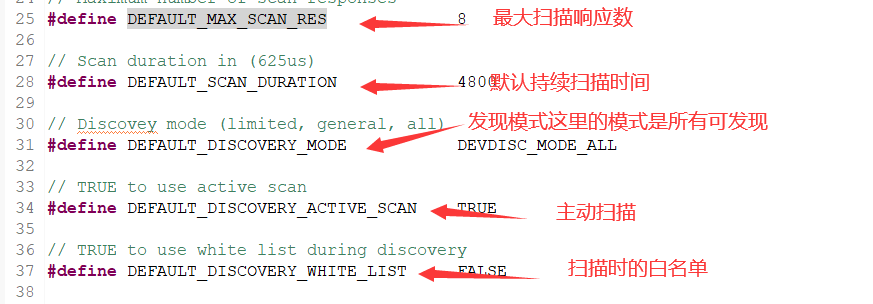
最大响应扫描数为8,在串口调试助手那里可以看到打印出的8个MAC地址。
这里的白名单是默认关闭的。

接下来对初始化进行讨论。

void Observer_Init() { ObserverTaskId = TMOS_ProcessEventRegister(Observer_ProcessEvent); // Setup Observer Profile { uint8_t scanRes = DEFAULT_MAX_SCAN_RES; GAPRole_SetParameter(GAPROLE_MAX_SCAN_RES, sizeof(uint8_t), &scanRes); } // Setup GAP GAP_SetParamValue(TGAP_DISC_SCAN, DEFAULT_SCAN_DURATION); // Setup a delayed profile startup tmos_set_event(ObserverTaskId, START_DEVICE_EVT); }
这里是初始化期间调用的功能,这里的详解可以参照CH58X/CH57X/V208的Broadcaster(广播者)例程讲解 - 小舟从此逝_1 - 博客园 (cnblogs.com)这篇文章。
接下来是对任务的管理调度,这里用的是TMOS事件管理。关于TMOS的理解具体可以参照WCH TMOS用法详解 - debugdabiaoge - 博客园 (cnblogs.com)
再次之前我们要了解一下TMOS任务的调度,在这里TMOS任务可以定义16个其中有15个自定义,1个系统任务。
广播者的例程里共写了两个任务,首先看到第一个任务
if(events & SYS_EVENT_MSG) { uint8_t *pMsg; if((pMsg = tmos_msg_receive(ObserverTaskId)) != NULL) { Observer_ProcessTMOSMsg((tmos_event_hdr_t *)pMsg); // Release the TMOS message tmos_msg_deallocate(pMsg); } // return unprocessed events return (events ^ SYS_EVENT_MSG); }
这个任务就是唯一的一个系统任务,这里是在各层协议栈之间传递数据,这这里是接收消息。同时还有这几个函数用于内部数据的传递。这部分可以参考CH579/CH57x 的TMOS系统使用 - iot-fan - 博客园 (cnblogs.com)对这部分进行更详尽的了解。
extern bStatus_t tmos_msg_send( tmosTaskID taskID, uint8_t *msg_ptr ); extern uint8_t *tmos_msg_receive( tmosTaskID taskID ); extern uint8_t *tmos_msg_allocate( uint16_t len ); extern bStatus_t tmos_msg_deallocate( uint8_t *msg_ptr );
第二个任务则是用户自定义事件,本例程中只使用了这一个自定义事件;
if(events & START_DEVICE_EVT) { // Start the Device GAPRole_ObserverStartDevice((gapRoleObserverCB_t *)&ObserverRoleCB); return (events ^ START_DEVICE_EVT); } // Discard unknown events return 0; }
GAPRole_ObserverStartDevice((gapRoleObserverCB_t *)&ObserverRoleCB);此函数是观察者角色启动设备,在系统启动期间调用一次。
下面讨论的是对自定义任务的回调函数。
static void ObserverEventCB(gapRoleEvent_t *pEvent) { switch(pEvent->gap.opcode) {
//事件初始化完成之后发送
case GAP_DEVICE_INIT_DONE_EVENT:
{
GAPRole_ObserverStartDiscovery(DEFAULT_DISCOVERY_MODE,
DEFAULT_DISCOVERY_ACTIVE_SCAN,
DEFAULT_DISCOVERY_WHITE_LIST);
PRINT("Discovering...\n"); } break;
//将设备添加到设备发现结果列表 case GAP_DEVICE_INFO_EVENT: { ObserverAddDeviceInfo(pEvent->deviceInfo.addr, pEvent->deviceInfo.addrType); } break; //设备发现完成将设备罗列出来 case GAP_DEVICE_DISCOVERY_EVENT: { PRINT("Discovery over...\n"); // Display discovery results if(pEvent->discCmpl.numDevs > 0) { int i, j; // Increment index of current result (with wraparound) for(j = 0; j < pEvent->discCmpl.numDevs; j++) { PRINT("Device %d : ", j); for(i = 0; i < 6; i++) { PRINT("%x ", pEvent->discCmpl.pDevList[j].addr[i]); } PRINT("\n"); } } GAPRole_ObserverStartDiscovery(DEFAULT_DISCOVERY_MODE, DEFAULT_DISCOVERY_ACTIVE_SCAN, DEFAULT_DISCOVERY_WHITE_LIST); PRINT("Discovering...\n "); } break; default: break; } }
上述程序中的
GAPRole_ObserverStartDiscovery(DEFAULT_DISCOVERY_MODE,
DEFAULT_DISCOVERY_ACTIVE_SCAN,
DEFAULT_DISCOVERY_WHITE_LIST); 我们可以看到可以看到本函数的定义
extern bStatus_t GAPRole_ObserverStartDiscovery( uint8_t mode, uint8_t activeScan, uint8_t whiteList );
uint8_t mode:发现模式 uint8_t activeScan:如果为TRUE执行主动扫描 uint8_t whiteList:仅扫描白名单中的设备
这三个参数在本例程的定义分别是:
#define DEFAULT_DISCOVERY_MODE DEVDISC_MODE_ALL
#define DEFAULT_DISCOVERY_ACTIVE_SCAN TRUE
#define DEFAULT_DISCOVERY_WHITE_LIST FALSE
ObserverAddDeviceInfo(pEvent->deviceInfo.addr, pEvent->deviceInfo.addrType);调用的函数为
static void ObserverAddDeviceInfo(uint8_t *pAddr, uint8_t addrType) { uint8_t i; // If result count not at max if(ObserverScanRes < DEFAULT_MAX_SCAN_RES) //如果未达到最大扫描数量,扫描个数由自己设置(大约可扫描的数量是40左右) { // Check if device is already in scan results for(i = 0; i < ObserverScanRes; i++) { if(tmos_memcmp(pAddr, ObserverDevList[i].addr, B_ADDR_LEN)) { return; } } // Add addr to scan result list tmos_memcpy(ObserverDevList[ObserverScanRes].addr, pAddr, B_ADDR_LEN); ObserverDevList[ObserverScanRes].addrType = addrType; // Increment scan result count ObserverScanRes++; } }
这只是最基础的讨论,如有问题请指正!
如转载请标明出处!文章可能被无良网站搬运。某些网站拿着别人的文章写着“我的编程学习分享”。