-
ROS2与turtlebot4仿真入门教程-turtlebot4异步建图
目录:
- ROS2与turtlebot4仿真入门教程-目录
- ROS2与turtlebot4仿真入门教程-安装ROS2
- ROS2与turtlebot4仿真入门教程-安装turtlebot4
- ROS2与turtlebot4仿真入门教程-turtlebot4遥控
- ROS2与turtlebot4仿真入门教程-测试雷达和相机
- ROS2与turtlebot4仿真入门教程-turtlebot4异步建图
- ROS2与turtlebot4仿真入门教程-turtlebot4同步建图
- ROS2与turtlebot4仿真入门教程-turtlebot4单点导航
- ROS2与turtlebot4仿真入门教程-turtlebot4多点导航
- ROS2与turtlebot4仿真入门教程-turtlebot4融合建图和导航
说明:
- 介绍如何仿真下实现异步建图
步骤:
- 启动仿真
ros2 launch turtlebot4_ignition_bringup ignition.launch.py slam:=async rviz:=true- 开始仿真,离开充电桩,利用鼠标左键和中键,调整视图
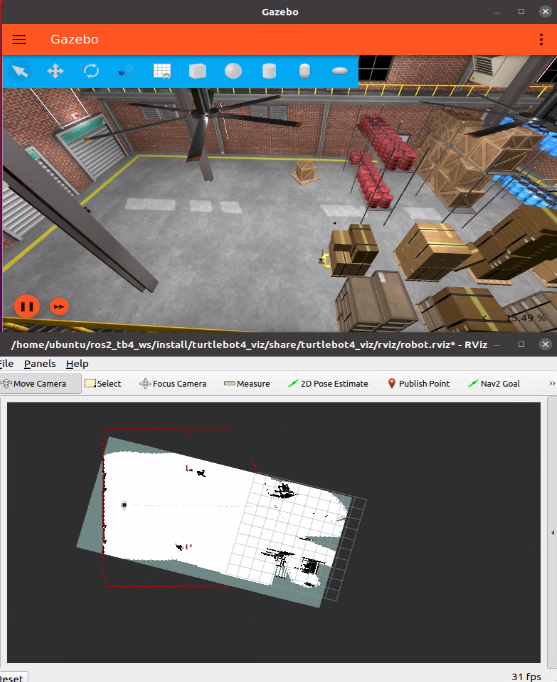
- ign效果图

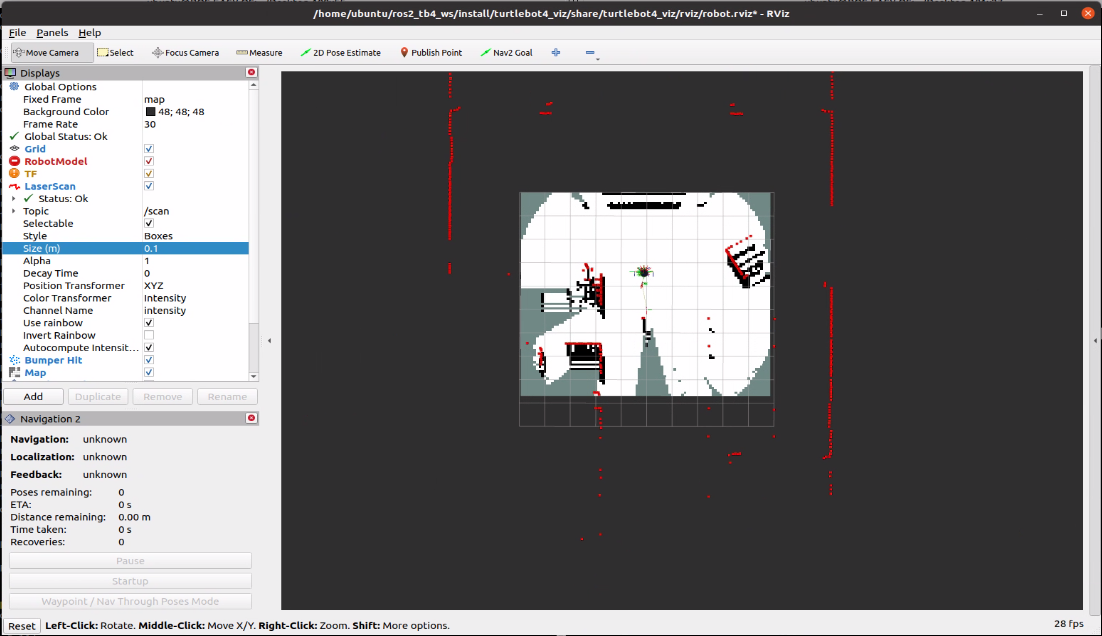
- rviz效果图:
- 启动键盘
ros2 run teleop_twist_keyboard teleop_twist_keyboard- 可以通过键盘控制小车移动键盘
- 效果图:
- 目前效果比较一般,还需要进一步优化
保存地图:
- 执行命令:
- $ ros2 service call /slam_toolbox/save_map slam_toolbox/srv/SaveMap "{name: {data: 'map_name'}}"
- requester: making request: slam_toolbox.srv.SaveMap_Request(name=std_msgs.msg.String(data='map_name'))
- response:
- slam_toolbox.srv.SaveMap_Response()
- 可以更改地图map_name, 地图保存在你执行这个命令的目录下
- 查看地图
eog map_name.pgm -
相关阅读:
微服务--Gatway:网关
Flowable 的使用
BFS:FloodFill算法
【免费赠送源码】Springboot乐校园二手书交易管理系统oc81w计算机毕业设计-课程设计-期末作业-毕设程序代做
JAVA:实现PrimeFactorization质因数分解算法(附完整源码)
Base64隐写
Qt-键盘消息的传递-键盘消息的获取-C++
Spring boot+Spring security+JWT实现前后端分离登录认证及权限控制
1. CMake基本
Odoo丨如何在明细行中添加复选框?
- 原文地址:https://blog.csdn.net/ncnynl/article/details/127727425