-
球形罩铆接机械臂设计(lunwen+开题报告+指导记录+设计图纸+PLC控制程序)
目 录
第1章 绪论…
1.1 引言…
1.2 机械手的应用现状…
1.3 机械手的应用意义…
1.4机械手的组成与分类…
1.4.1机械手的组成…
1.4.2机械手的分类…
1.5本课题的目的和意义…
1.6本课题应解决的主要问题及技术要求…
第2章球形罩铆接机械臂的总体方案设计…
2.1机械臂的动作要求…
2.2机械臂的技术参数…
2.3机械臂的驱动方案设计…
2.4机械臂的控制方案设计…
第3章机械手臂部机构设计…
3.1机械臂的机构选择…
3.2手臂偏重力矩的计算…
3.3手臂伸缩液压缸驱动及参数计算…
第4章液压泵的选择及液压系统的设计…
4.1液压泵的选择…
4.1.1液压伸缩缸的流量计算…
4.1.2确定液压泵的额定流量…
4.1.3确定液压泵的额定压力…
4.2液压系统的原理…
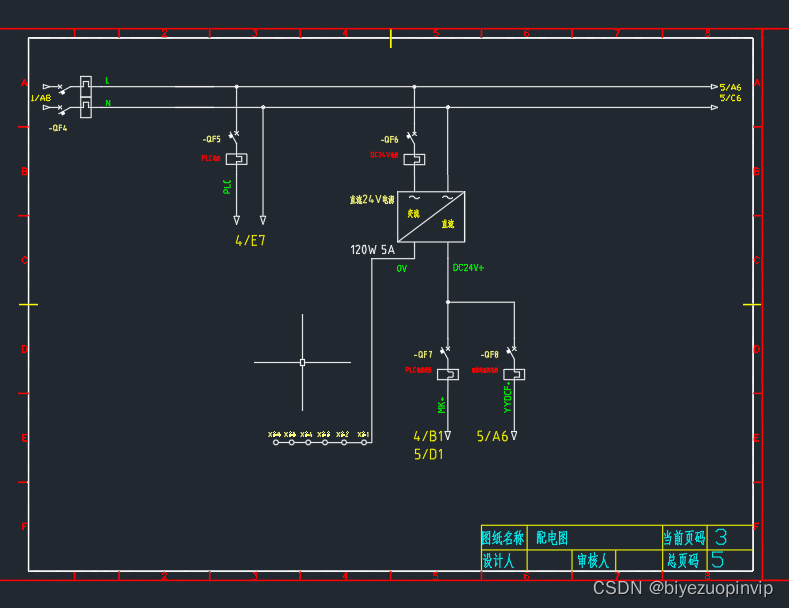
第5章机械臂的控制系统…
5.1 PLC控制系统设计的步骤…
5.2 控制要求…
5.3 PLC的I/O分配表…
5.4 控制系统及原理…
总结…
参考文献…
1.6 本课题应解决的主要问题及技术要求
(1)铆接时人不用在下面去支撑,可以用机械臂去代替;
(2)机械臂的结构和尺寸要符合机械臂工作要求;
(3)为了提高机械臂的控制精度,应该确保机械臂尽可能在结构上、选择的材料上去减轻其重量,这样可使机械臂的使用时间增长,同时机座要求重量大。
(4)机械臂各关节之间的轴承间隙不能太大,应尽可能地减小,这样工作时机械臂就不会产生太大的运动误差。第2章球形罩铆接机械臂的总体设计方案
2.1 球形罩铆接机械臂的动作要求
先按下自动按钮→液压机械臂伸出→伸出到位后,延时一秒→转动电机开始向上转动(小于90°)→当接触到工作面时,停止转动,延时一秒→旋转电机开始旋转(可360°旋转),延时一秒进行作业→二十秒后旋转电机停止旋转,机械臂开始向下转动到初始位置后停止→停止后液压机械臂缩回,运行结束,这样就完成一个工作。
2.2该机械臂的技术参数
支撑重量:1kg 自由度:3
手臂水平位移:100mm 转动电机角度;90°
水平位移速度:75mm 旋转电机角度:360°
角位移速度:110°/s 液压缸内径:200mm
液压缸外径:250mm 活塞直径:50mm
支撑面:半径为150mm
2.3机械臂的驱动方案设计
根据支撑工件的要求,手臂主要靠液压缸工作来完成水平来回的伸缩运动,转动电机上下转动90°,底座上的旋转电机可旋转360°。所以本次采用液压驱动。
一、液压传动的优点:
(1)、与其他传动方式相对比,它可以提供很大的推力,也可实现低速运动。
(2)、液压传动的无级调速具有方便性,调速范围广,调速具有随时性,即使在系统正在运行时也可调速,并且还不影响其正常工作。
(3)、在功率相同的情况下,液压传动占地空间小、很轻巧、结构紧凑。液压元件之间可采用管道连接,灵活性高,可以跟其它传动方式组成的更加复杂系统。
(4)、液压传动的执行元件其运动具有稳定性,可使运动部件换向时无换向冲击。而且由于其反应速度快,故可实现频繁换向。
(5)、操作简单,本文转载自http://www.biyezuopin.vip/onews.asp?id=10855调整控制方便,易于实现自动化。
(6)液压系统装有过载保护,在它工作时具有安全性、可靠性。元件可使用的时间也很长,主要是因为液压元件中的运动件均在油液中工作,能自行润滑。
(7)、液压元件易于实现系列化、标准化和通用化,对设计和维修很方便。
二、液压传动的缺点:
(1)、执行元件运动的准确性低,影响它的主要是油的泄漏和液体的可压缩性,故不能确保它的传动比具有严格性。
(2)、敏感性很高,主要体现在对温度,在温度低或者很高的时候很难工作。
(3)、能量损失很大,主要表现在泄漏损失、溢流损失、节流损失、摩擦损失等四个方面,且传动效率较低,也不适宜作远距离传动。
(4)、当系统出现故障时,查找故障发生的原因是很困难的。


















-
相关阅读:
5分钟搞懂分布式可观测性
Fluent Operator 2.5.0 发布:新增多个插件
SQLServer导出数据库字典
程序员看不懂就丢人了
拼多多电商官方平台根据ID获取APP商品详情原数据、券后价、商品信息、sku信息指南
《动手学深度学习》(一)-- 线性神经网络
docker安装可视化Portainer界面
静态IP怎么设置网速快?
【从零开始的Java开发】1-6-2 泛型:概述、泛型作为方法参数、自定义泛型、自定义泛型方法
React 与 TS 结合使用时的技巧总结
- 原文地址:https://blog.csdn.net/newlw/article/details/127786109