-
计算机图形学(一) 向量
向量
表示
 1. 通常写为
a
⃗
\vec{a}
a 或者黑体的 a
1. 通常写为
a
⃗
\vec{a}
a 或者黑体的 a
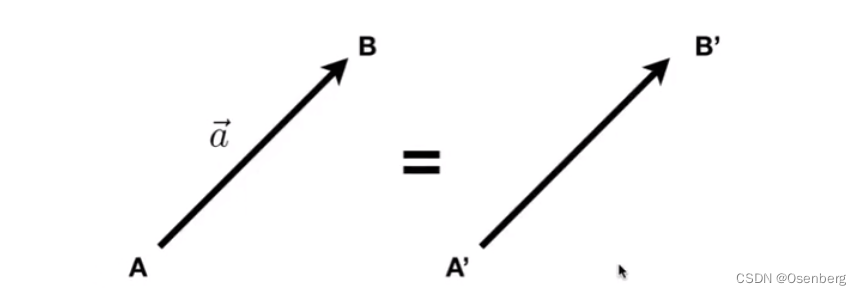
2. 或者使用开始和结束的端点表示 A B → \overrightarrow{AB} AB = B - A
3. 向量既有大小又有方向,标量只有大小没有方向
4. 没有绝对的起始位置(向量的大小和方向与它的位置无关)向量的归一化(vector normalization)
- 向量的大小表示为 ∣ ∣ a ⃗ ∣ ∣ ||\vec{a}|| ∣∣a∣∣
- 单位向量
- 向量的大小为 1
- 求一个向量的单位向量(向量的归一化): a ^ \hat{a} a^ = a ⃗ \vec{a} a / ∣ ∣ a ⃗ ∣ ∣ ||\vec{a}|| ∣∣a∣∣
- 单位向量的作用:用来表示方向
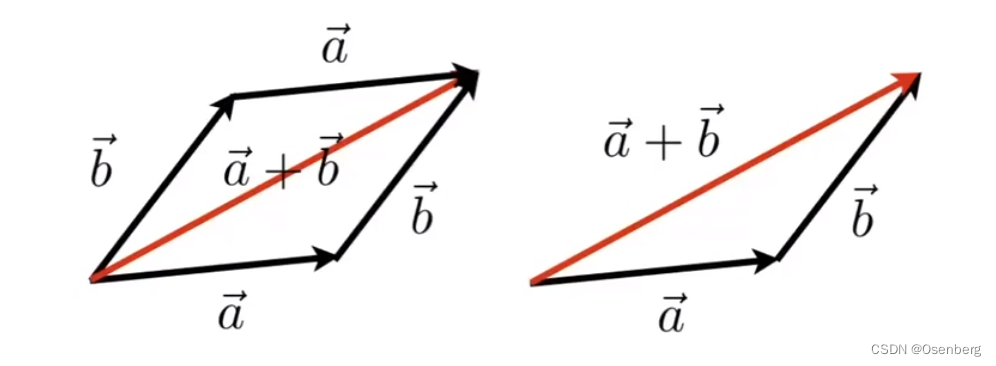
向量求和
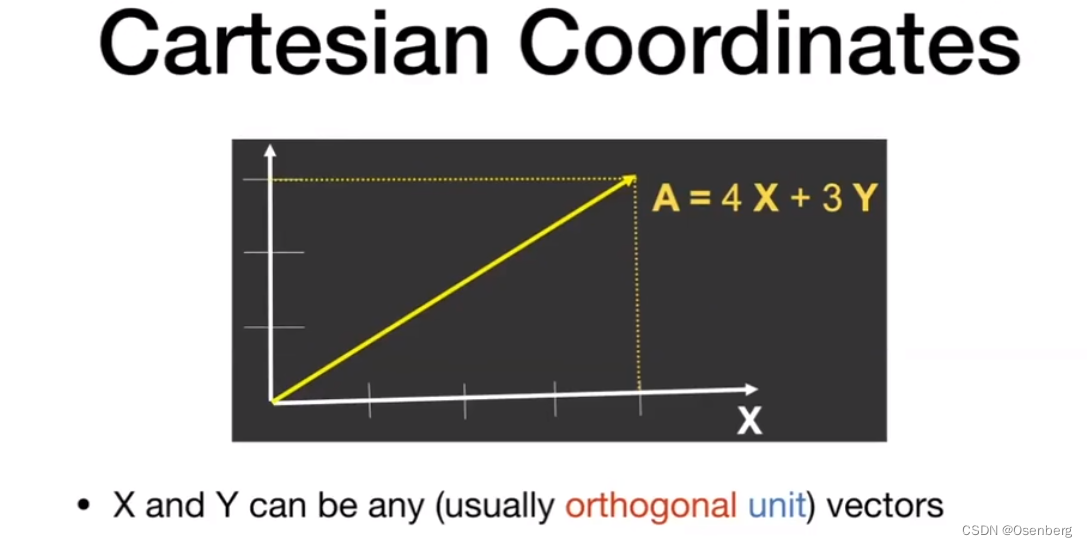
图形学上默认向量是列向量: A = ( x y ) (xy)
(xy)(xy)
转置之后是行向量: A T A^T AT = ( x , y ) (x,y)(x,y)(x,y)
向量的模: ∣ ∣ A ⃗ ∣ ∣ ||\vec{A}|| ∣∣A∣∣ = x 2 + y 2 \sqrt{x^2 + y^2} x2+y2向量点乘(Dot Product)
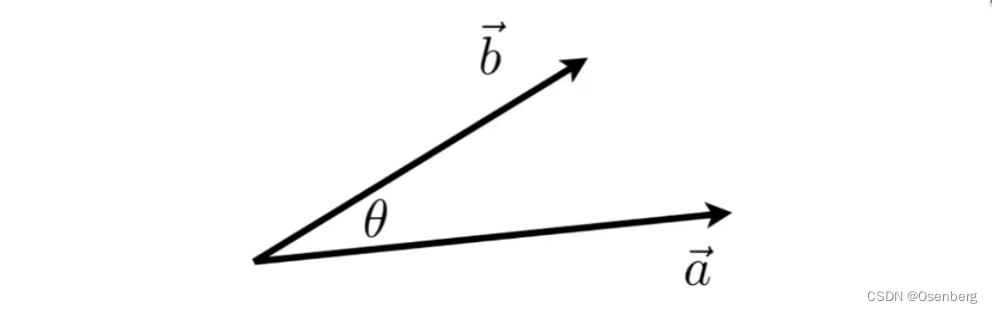
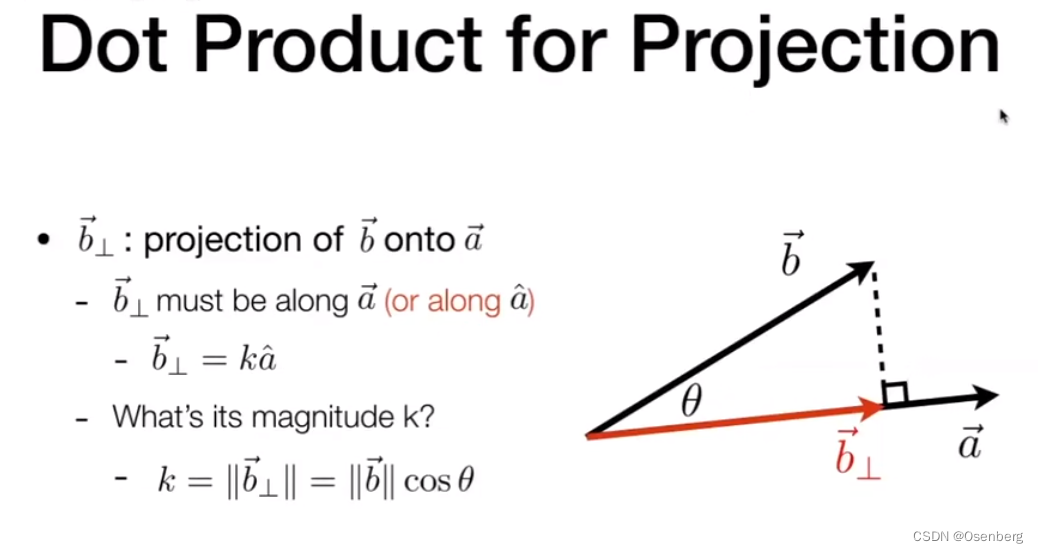
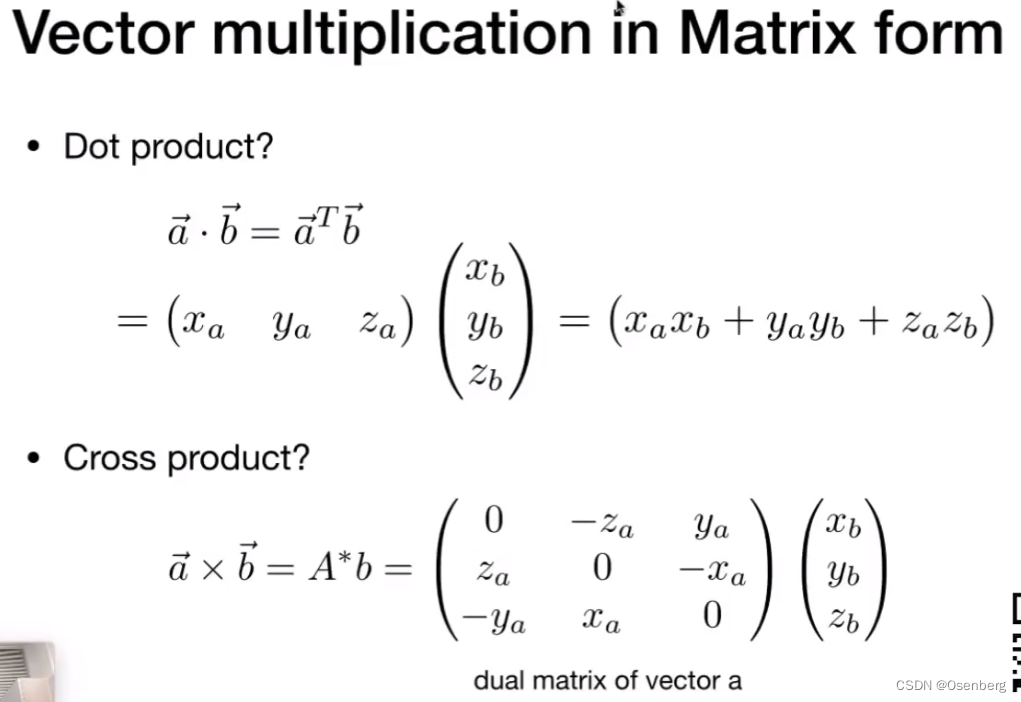
a ⃗ ∗ b ⃗ \vec{a} * \vec{b} a∗b = ∣ ∣ a ⃗ ∣ ∣ ||\vec{a}|| ∣∣a∣∣ ∣ ∣ b ⃗ ∣ ∣ ||\vec{b}|| ∣∣b∣∣ c o s θ cos\theta cosθ
c o s θ cos\theta cosθ = a ⃗ ∗ b ⃗ ∣ ∣ a ⃗ ∣ ∣ ∣ ∣ b ⃗ ∣ ∣ \frac{\vec{a}*\vec{b}}{||\vec{a}||||\vec{b}||} ∣∣a∣∣∣∣b∣∣a∗b
对于单位向量就有:
c o s θ cos\theta cosθ = a ^ ∗ b ^ \hat{a}*\hat{b} a^∗b^点乘的属性:

笛卡尔坐标系下的点乘运算

点乘在图形学中的作用
- 计算两个向量的夹角(比如光源和平面的夹角的 c o s cos cos 值)
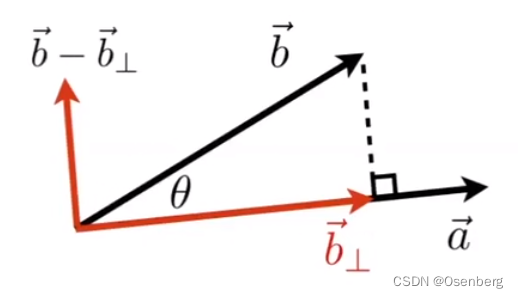
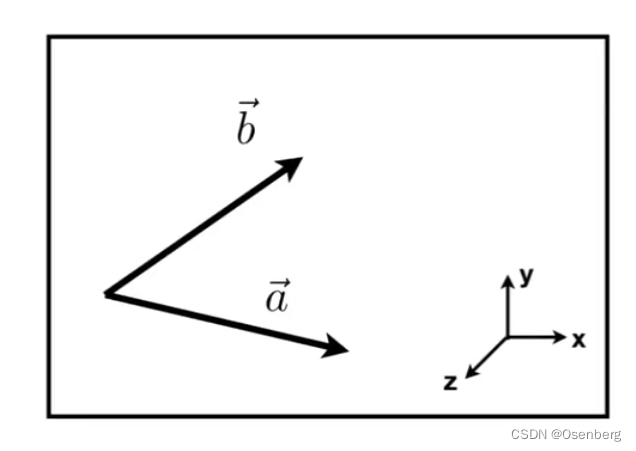
- 计算一个向量到另一个向量的投影,如下图:
- 计算两个向量(方向)有多接近(计算出两个向量的 c o s cos cos值)
- 分解一个向量为两个相互垂直的向量(利用平行四边形法则)
- 判定向量是向前的还是向后的

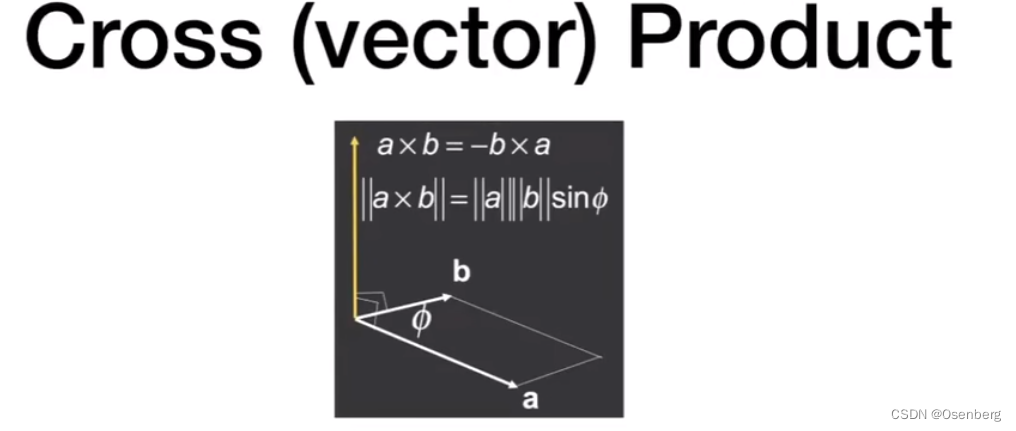
向量的叉乘
- 两个向量叉乘的结果是垂直于这两个向量的一个新的向量
- 新向量的方向由右手定则确定
- 通常用于建立一个坐标系系统
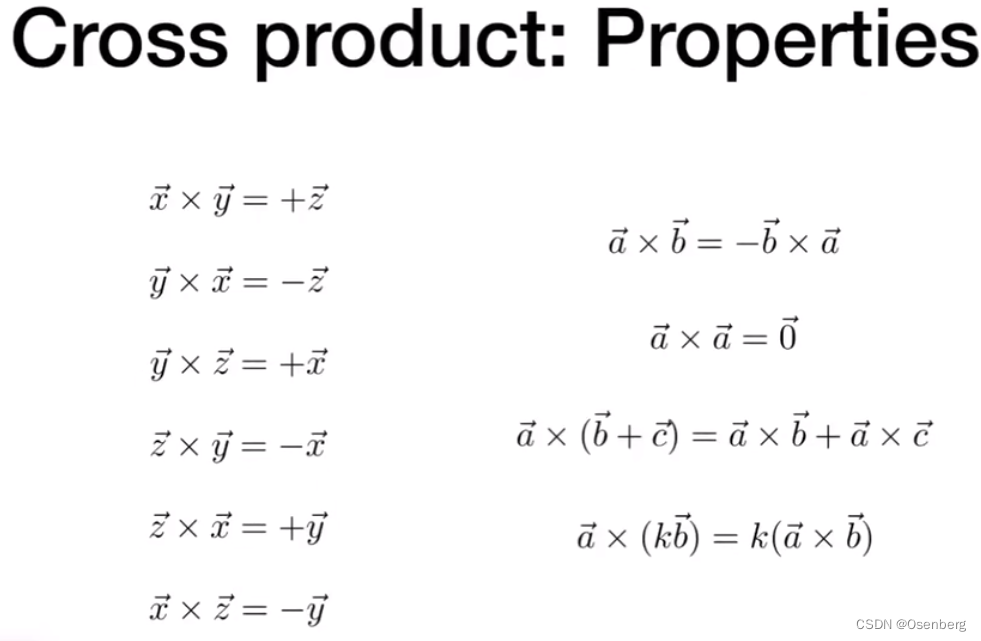
叉乘的属性
叉乘的作用
- 判定左和右
- 判定内和外
使用 a ⃗ \vec{a} a 叉乘 b ⃗ \vec{b} b,得到的 Z 是正的,则 b ⃗ \vec{b} b 在 a ⃗ \vec{a} a 的左侧,Z 是负的,表示 b ⃗ \vec{b} b 在 a ⃗ \vec{a} a 的右侧(使用右手螺旋定则)
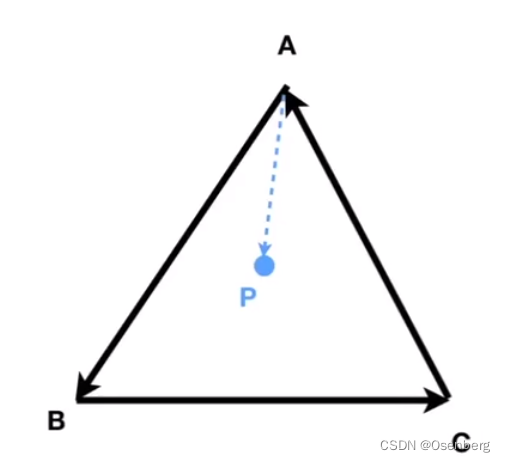
A B → \overrightarrow{AB} AB, B C → \overrightarrow{BC} BC, C A → \overrightarrow{CA} CA 依次叉乘 A P → \overrightarrow{AP} AP, B P → \overrightarrow{BP} BP, C P → {\overrightarrow{CP}} CP, 得到的垂直于两个向量的向量都是正的,则都依次位于三个向量的左边,则代表在三角形内部。有一个不位于左边则表明在三角形的外部。
点乘与叉乘的联系
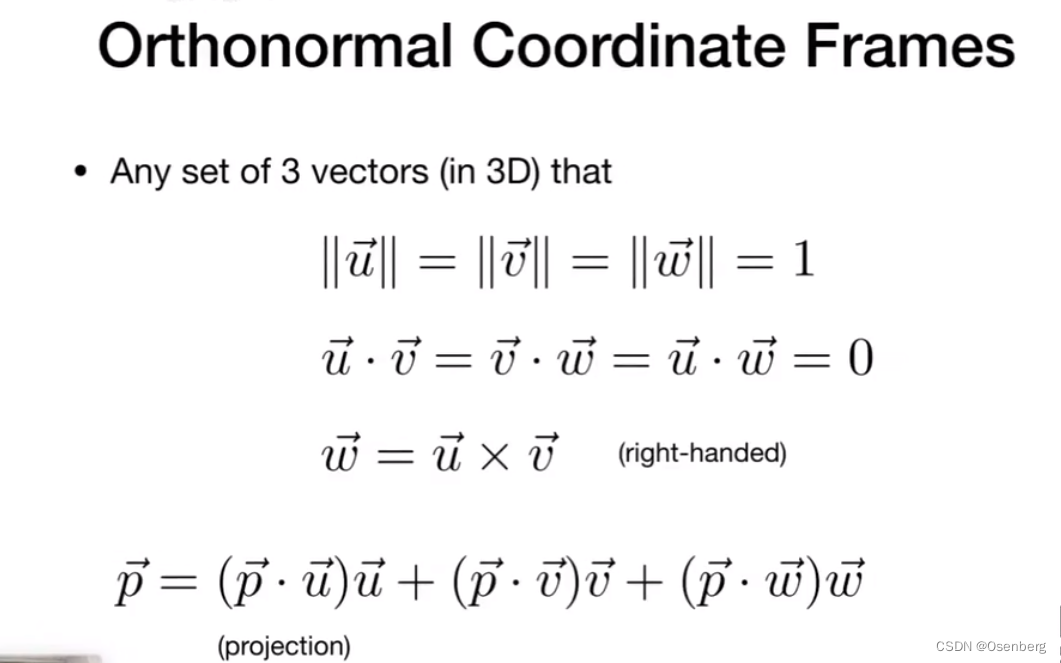
实际应用中,可以使用叉乘建立一个直角坐标系,之后就可以将一个任意一个向量分解到坐标系的三个轴上。分解的方法就是使用投影,而计算投影的方法是使用点乘
矩阵
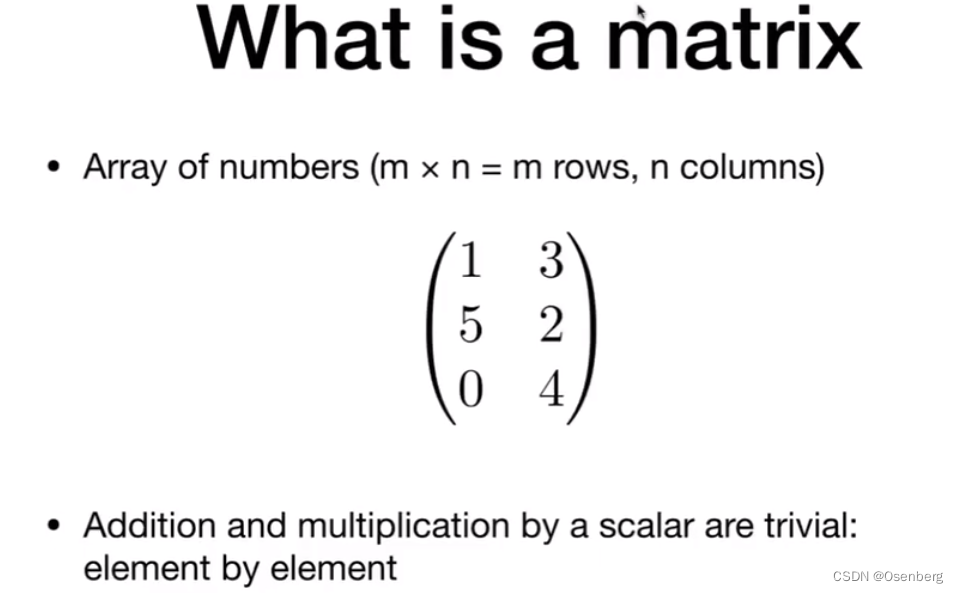
矩阵的乘法
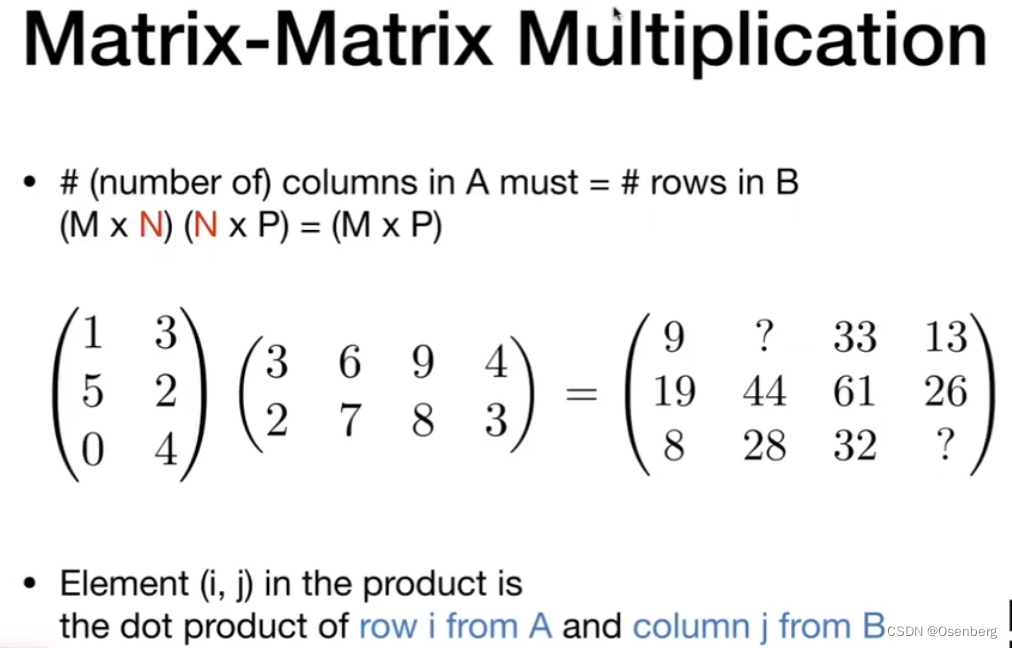
矩阵的属性
- 不存在任何交换律,AB 不等于 BA
- 结合律和分配律
- (AB)C = A(BC)
- A(B + C) = AB + AC
- (A + B)C = AC + BC
矩阵与向量乘作用
将一个向量当作一个 mx1 的矩阵(列向量)
矩阵在做,向量在右,
变换的核心
比如:将一个点做按 Y 轴对称操作:
( − 1 0 0 1 ) (−1001)(−1001) ( x y ) (xy)(−1001) (xy) = ( − x y ) (−xy)(xy) (−xy)矩阵的转置
矩阵的转置就是将矩阵的行和列互换,比如
( 1 2 3 4 5 6 ) T (123456)^T ⎝⎛135246⎠⎞T = ( 1 3 5 2 4 6 ) (135246)(123456)转置的性质
( A B ) T (AB)^T (AB)T = B T A T B^TA^T BTAT
单位矩阵和逆矩阵
- 对角线方向上(左上到右下)都为 1,其他全为 0,就是单位矩阵
I 3 ∗ 3 = ( 1 0 0 0 1 0 0 0 1 ) I_{3*3} = (100010001)I3∗3=⎝⎛100010001⎠⎞ - 对一个 n 阶方阵 A ,如果存在另一个 n 阶方阵 B,它们满足:AB = BA = I(其中 I 为单位矩阵),那么两矩阵互为逆矩阵。换句话说,A 的逆矩阵为 B ,B 的逆矩阵为 A, 记为 A − 1 A^{-1} A−1
- 逆矩阵是唯一的
性质
( A B ) − 1 = B − 1 A − 1 (AB)^{-1} = B^{-1}A^{-1} (AB)−1=B−1A−1
正交矩阵
矩阵 A A A 的逆等于矩阵 A − 1 A^{-1} A−1 的转置矩阵 A T A^T AT, 那么矩阵 A A A 就是一个正交矩阵
矩阵形式的向量的乘积
-
相关阅读:
JAVA毕业设计河东街摊位管理系统计算机源码+lw文档+系统+调试部署+数据库
聚类模型的算法性能评价
代码随想录day动态规划回文子串
如何解决由触发器导致 MySQL 内存溢出?
排列组合概率题解题技巧
Apache Doris的架构讲解
热量衡算习题课
Sparse稀疏检索介绍与实践
我的创作纪念日
python开篇——初识python
- 原文地址:https://blog.csdn.net/VOlsenBerg/article/details/127714254