-
维纳滤波原理极其Python实现
原理
从信号与系统的角度出发,有一部分噪声是系统的固有噪声,另一部分,则是对信号的某种响应,换言之,这部分噪声可以理解为一个噪声系统。所以滤除后者,可以理解为去除噪声系统的影响,换言之,就是针对噪声系统做反卷积。
如果噪声系统可以测量,那么反卷积自然可以顺利执行,否则那就要对这个噪声系统进行估计,维纳滤波履行的就是这个思路。
现有一组观测量 { x i } \{x_i\} {xi},由信号和噪声部分组成,即 x i = y i + v i x_i=y_i+v_i xi=yi+vi, v i v_i vi就是噪声分量。所谓去噪过程,就是找出一组 y i y_i yi的逼近值 y ^ i \hat y_i y^i。
所以接下来的问题是,这组量应该怎么找?考虑到求比证难,不妨把这个问题再简化一下,如果找到了一组值,那么如何确定这组值是对的?
正常思路一定是,定义一个误差量 e i = y ^ i − y i e_i=\hat y_i-y_i ei=y^i−yi,然后找到这个误差量的某个统计值的极值,考虑到正负号的问题,这个统计量有可能是方差。
而学过信号与系统,就一定会定义一个 h i h_i hi,作为滤波器的冲击响应,则 y ^ i \hat y_i y^i可以表示为 h i h_i hi对信号的卷积
y ^ i = ∑ k h k x i − k \hat y_i=\sum_k h_kx_{i-k} y^i=k∑hkxi−k
为了便于阅读,可以将上面的式子写为矩阵形式,就是 y ^ = h x \hat y=hx y^=hx, e = y ^ − y e=\hat y-y e=y^−y。
接下来就可以用 h h h来表示误差量 e e e的方差
ε = E ( e 2 ) = E [ ( y ^ − y ) 2 ] = E [ ( h x − y ) 2 ] = E [ ( y 2 + h x x T h T − 2 y h x ) 2 ] \begin{aligned} \varepsilon&=E(e^2)=E[(\hat y-y)^2]\\ &=E[(hx-y)^2]\\ &=E[(y^2+hxx^Th^T-2yhx)^2] \end{aligned} ε=E(e2)=E[(y^−y)2]=E[(hx−y)2]=E[(y2+hxxThT−2yhx)2]
取极值,那就少不了求导,这个 h h h就是要求导的量
∂ ε ∂ h = E [ 2 x x T h T − 2 y x ] \frac{\partial\varepsilon}{\partial h} =E[2xx^Th^T-2yx] ∂h∂ε=E[2xxThT−2yx]
极值点处,偏导数为0,从而得到
h = E [ ( x x T ) − 1 ] E ( x y ) h=E[(xx^T)^{-1}]E(xy) h=E[(xxT)−1]E(xy)
有了 h h h,相当于有了噪声系统的作用形式,也就可以基于此进行反卷积了。
scipy调用维纳滤波
scipy中封装了维纳滤波,其形式为scipy.signal.wiener(im, mysize=None, noise=None)- 1
其中,
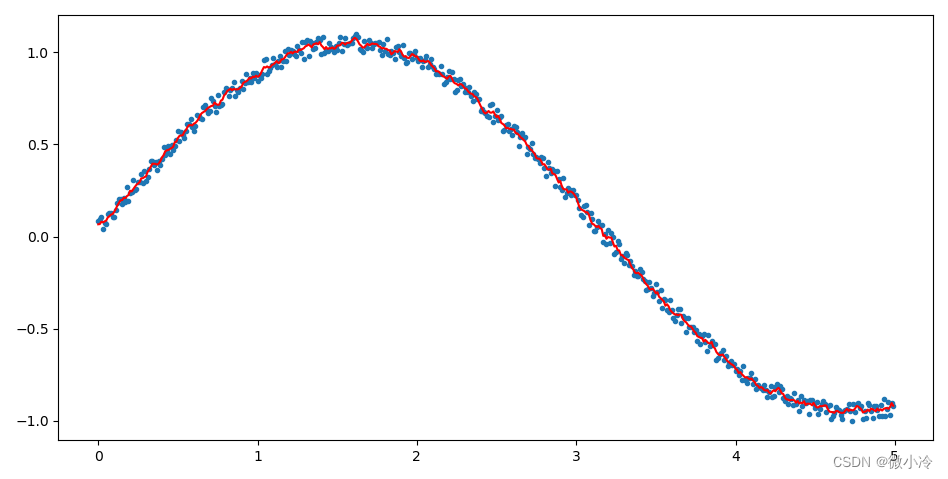
im为待滤波数据,mysize为滤波模板的尺寸,noise为系统的噪声,如果为None,那么将自动估计系统噪声。import numpy as np import matplotlib.pyplot as plt from scipy.signal import wiener x = np.arange(0,5,0.01) y = np.sin(x) yhat = y + np.random.rand(len(yhat))*0.1 yFilt = wiener(yhat, 5) # 维纳滤波 plt.scatter(x, yhat, marker='.') plt.plot(x, yFilt, c='r') plt.show()- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
效果如下
-
相关阅读:
【学习草稿】bert文本分类
14、$axios异步加载数据asyncData
React知识点系列(7)-每天10个小知识
637. 二叉树的层平均值
Java基础~线程和进程(3) 多线程编程细节
高精度隧道施工人员定位安全管理解决方案
Tableau5——地图,仪表板
mac安装allure及allure:command not fund问题解决
Python如何调用ixchariot进行吞吐量测试
【Visual Leak Detector】源码文件概览
- 原文地址:https://blog.csdn.net/m0_37816922/article/details/127781620