-
基于prim算法的网络最小生成树生成得到路径规划
目录
一、理论基础
Prim算法是一种求解最小生成树问题的贪心算法。它的基本思想是,从某一个顶点开始,逐步增加边,每次选择当前生成树与外界顶点之间权值最小的边,直至所有的顶点都被包含在生成树内。
在Prim算法中,我们首先任选一个顶点作为起始点,然后逐步添加边,使得新的边连接已在生成树中的顶点和未在生成树中的顶点,并且这条边的权值是当前所有这样的边中最小的。在每一步中,我们都需要更新已连接顶点的集合和未连接顶点的集合。
Prim算法的具体步骤如下:
- 初始化:从图中选择一个顶点加入到最小生成树中。
- 重复以下步骤直到所有的顶点都加入到最小生成树中:
a. 在所有连接已在生成树中的顶点和未在生成树中的顶点的边中,选择权值最小的边。如果有多个权值相同的边,可以选择任意一个。
b. 将这条边的另一端点加入到最小生成树中。 - 结束后,已经生成的树就是图的最小生成树。
Prim算法的时间复杂度是O(ElogE),其中E是边的数量。如果使用二叉堆作为优先队列,时间复杂度可以降低到O(ElogV),其中V是顶点的数量。
Prim算法的核心思想是利用贪心的策略,逐步构造出最小生成树。由于每次选择的边是当前权值最小的,因此可以保证最终得到的生成树的权值是最小的。
至于Prim算法在网络路径规划中的应用,它主要可以用于构建最小代价的网络拓扑结构。例如,在通信网络中,我们可以利用Prim算法构建一棵最小代价的生成树,使得任意两个节点之间的通信代价最小。在物联网中,我们可以利用Prim算法构建一棵最小能耗的生成树,使得所有设备在通信时的总能耗最小。
Prim算法的核心公式是:对于任意一个在生成树中的顶点集合U和不在生成树中的顶点集合V,连接U和V的所有边的权值最小的那条边,其权值一定是最小生成树的一部分。这个公式的证明可以使用反证法:如果这条边的权值不是最小的,那么我们可以找到另一条权值更小的边来替换它,从而得到一个更小的生成树,这与我们的假设矛盾。因此,这条边的权值一定是最小生成树的一部分。
普里姆算法(Prim算法),图论中的一种算法,可在加权连通图里搜索最小生成树。意即由此算法搜索到的边子集所构成的树中,不但包括了连通图里的所有顶点(英语:Vertex (graph theory)),且其所有边的权值之和亦为最小。该算法于1930年由捷克数学家沃伊捷赫·亚尔尼克(英语:Vojtěch Jarník)发现;并在1957年由美国计算机科学家罗伯特·普里姆(英语:Robert C. Prim)独立发现;1959年,艾兹格·迪科斯彻再次发现了该算法。因此,在某些场合,普里姆算法又被称为DJP算法、亚尔尼克算法或普里姆-亚尔尼克算法。
1).输入:一个加权连通图,其中顶点集合为V,边集合为E;
2).初始化:Vnew = {x},其中x为集合V中的任一节点(起始点),Enew = {},为空;
3).重复下列操作,直到Vnew = V:
a.在集合E中选取权值最小的边
b.将v加入集合Vnew中,将
4).输出:使用集合Vnew和Enew来描述所得到的最小生成树。
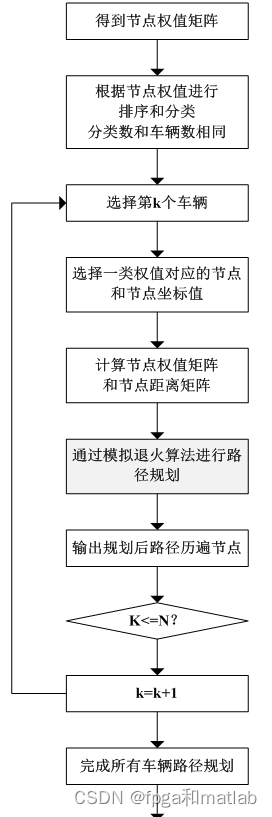
然后将这个整体算法流程图中各个核心步骤的过程进行介绍:
1.根据节点权值进行排序和分类
根据算法步骤,可以得到最终的各个节点的权值,权值越大,需要充电的节点数量则越大,然后在进行分类的时候,需要综合考虑各个区域的节点的权值,避免某一区域节点权值过大或者过小。这里,选择的是均匀划分方式,即每个MC,对应的节点数量相同,当然也可以其他划分方式,不同的方式得到不同的结果。
2.计算节点权值和节点距离的加权矩阵
这里考虑两个因素,一个是距离因素,即节点坐标因素,一个是通过前面几个步骤算法得到的节点权值因素,我们通过这两个因素进行计算最优路径规划。采用距离因素和节点权值因素。其中距离矩阵d,其计算方式为:

然后节点权值则根据前面的几个步骤算法得到W,然后根据距离因素和节点权值因素,得到一个加权的矩阵,即:

二、核心程序
- .................................................
- %%
- %社团划分
- %社团划分
- %社团划分
- %社团划分
- V0_set = (0.9+0.1*rand)*ones(1,CNUM);
- K_set = (0.09+0.01*rand)*ones(1,CNUM);
- Eall = 0;
- for cij = 1:CNUM
- if cij == 1
- Eall0=0;
- else
- Eall0=Eall;
- end
- %初始速度
- V0 = V0_set(cij);%
- %变速度系数
- K = K_set(cij);%
- %总能量
- Ec = 100;
- %随机的剩余能量,每个节点不一样,剩余能量的计算,需要根据多个车辆进行计算
- ei = 10+10*rand(1,N);
- %算法一所得的社团表
- Cj1;
- %各个社团表的中心点
- Xc1;
- Yc1;
- %能量级数ε的近似能量
- pa = 8*rand(1,N);
- Cj = Cj1;
- Tl = 200;
- Ei = ei/CNUM;
- ind = 0;
- %不同车的位置
- Xmc = [];
- Ymc = [];
- theta = 45/180*pi;
- %初始最优路径
- Nl= length(Xc1);
- a = 0.6;
- t0= 10;
- tf= 0.001;
- xx= Xc1;
- yy= Yc1;
- figure(2);
- for j = 1:length(C)
- tmp = C{j,1};
- X0 = Xo(tmp);
- Y0 = Yo(tmp);
- plot(X0,Y0,colors{j});
- hold on
- Xc(j)= mean(X0);
- Yc(j)= mean(Y0);
- for i = 1:length(tmp)
- dist(i) = sqrt((Xc(j)-X0(i))^2 + (Yc(j)-Y0(i))^2);
- end
- plot2(Xc(j),Yc(j),max(dist));
- hold on
- end
- plot(Xc,Yc,'rs','LineWidth',2,'MarkerEdgeColor','b','MarkerFaceColor','y','MarkerSize',10)
- hold on
- xx1 = [xx,xx(1)];
- yy1 = [yy,yy(1)];
- for i=1:Nl
- for j=1:Nl
- if i==j
- continue;
- end
- d(i,j)=sqrt((xx(i)-xx(j)).^2+(yy(i)-yy(j)).^2);
- end
- end
- gen=1;
- while gen<=5
- gen
- [f,T]=func_trp(a,d,t0,tf);
- opfs(gen) = f;
- paths(gen,:) = T;
- gen = gen+1;
- end
- for i=1:Nl
- xx2(i)=xx(T(i));
- yy2(i)=yy(T(i));
- end
- xx2(Nl+1)=xx(1);
- yy2(Nl+1)=yy(1);
- hold on
- plot(xx2,yy2);
- title('社团划分前的初始路径规划');
- %线路进行插值获得不同时刻MC的位置
- dall = 0;
- %模拟变速度
- for i = 1:length(xx2)-1;
- Va = V0 + K*randn;
- dall = sqrt((xx2(i)-xx2(i+1))^2 + (yy2(i)-yy2(i+1))^2);
- SCALE(i) = dall/Va;
- end
- %插值,用来模拟路径点坐标
- Xlp0=[];
- Ylp0=[];
- for i = 1:length(xx2)-1;
- Xlp0=[Xlp0,[xx2(i):(xx2(i+1)-xx2(i))/SCALE(i):xx2(i+1)]];
- Ylp0=[Ylp0,[yy2(i):(yy2(i+1)-yy2(i))/SCALE(i):yy2(i+1)]];
- end
- tk = 0.1;
- Tt = tk:tk:length(Xlp0)*tk;
- Esave = zeros(length(Tt),N);
- Cj2 = zeros(length(Tt),length(C));
- %根据路径进行mc移动,然后进行社团划分
- %根据路径进行mc移动,然后进行社团划分
- for t = Tt
- ind = ind+1;
- rng(ind);
- %mc移动
- Xmc(ind) = Xlp0(ind);
- Ymc(ind) = Ylp0(ind);
- %根据mc位置,对路过的社团进行充电
- ischarge = zeros(1,length(Cj));
- for j=1:length(Cj)%依次计算每个社团
- tmp = C{j,1};
- X0s = Xo(tmp);%社团中各个点的坐标
- Y0s = Yo(tmp);
- %计算社团的中心点,覆盖范围
- Xc = mean(X0s);
- Yc = mean(Y0s);
- for j2 = 1:length(tmp)
- dr(j2) = sqrt((Xc - X0s(j2))^2 + (Yc - Y0s(j2))^2);
- end
- Rr = max(dr);
- Rl = sqrt((Xc - Xmc(ind))^2 + (Yc - Ymc(ind))^2);
- if Rl <= Rr%进入某个社团
- ischarge(j) = 1;
- else
- ischarge(j) = 0;
- end
- end
- for j=1:length(ischarge)
- if ischarge(j) == 1%进行充电
- tmp = C{j,1};
- X0s = Xo(tmp);%社团中各个点的坐标
- Y0s = Yo(tmp);
- Xc = mean(X0s);
- Yc = mean(Y0s);
- for j2 = 1:length(tmp)
- if t == 1
- Ei(tmp(j2)) = ei(tmp(j2))/CNUM;
- else
- %计算距离
- dst = sqrt((X0s(j2)-Xc)^2 + (Y0s(j2)-Yc)^2);
- lvel= floor(dst/100)+1;
- Ei(tmp(j2)) = Ei(tmp(j2)) + pa(tmp(j2))*(1+0.5)^(-lvel)*tk;
- if Ei(tmp(j2)) >= Ec/CNUM
- Ei(tmp(j2)) = Ec/CNUM;
- end
- %容量限制
- if Ei(tmp(j2)) >= Ecap
- Ei(tmp(j2)) = Ecap;
- end
- end
- end
- else%不充电
- for j2 = 1:length(tmp)
- Ei(tmp(j2)) = Ei(tmp(j2));
- end
- end
- end
- %PN分类
- Xpc=[];
- Ypc=[];
- for j=1:length(C)
- tmp = C{j,1};
- X0s = Xo(tmp);%社团中各个点的坐标
- Y0s = Yo(tmp);
- %计算社团总能量
- Eall = Eall0 + sum(Ei(tmp));
- if Eall/(Ec*length(tmp)) >= 0.9
- Cj2(ind,j) = 1;%P
- %P型社团的中心
- Xpc=[Xpc,mean(X0s)];
- Ypc=[Ypc,mean(Y0s)];
- else
- Cj2(ind,j) = 0;%N
- end
- end
- Esave(ind,:) = Ei;
- %将P型社团的中心视为其停留点参与算法四的路线制定
- Xp{ind} = [Xpc];
- Yp{ind} = [Ypc];
- end
- %获得最终划分结果
- Cpn0 = sum(Cj2);
- Cpn = zeros(size(Cpn0));
- inx = find(Cpn0>0);
- Cpn(inx) = 1;
- Cpn
- %显示划分结果
- figure(3);
- for j = 1:length(Cj)
- tmp = Cj{j,1};
- X0 = Xo(tmp);
- Y0 = Yo(tmp);
- plot(X0,Y0,colors{j});
- hold on
- Xc(j)= mean(X0);
- Yc(j)= mean(Y0);
- for i = 1:length(tmp)
- dist(i) = sqrt((Xc(j)-X0(i))^2 + (Yc(j)-Y0(i))^2);
- end
- if Cpn(j) == 1
- plot3(Xc(j),Yc(j),max(dist));
- else
- plot4(Xc(j),Yc(j),max(dist));
- end
- hold on
- end
- plot(Xc,Yc,'rs','LineWidth',2,'MarkerEdgeColor','b','MarkerFaceColor','y','MarkerSize',10)
- title('社团划分结果(Red:P;Black:N),Yellow:P&N中心点');
- Xmc_set{cij} = Xmc;
- Ymc_set{cij} = Ymc;
- Esave_set{cij} = Esave;
- end
- Cpn_set = Cpn;
- ..............................................
三、测试结果

A26-08
-
相关阅读:
开源代码分享(3)—微电网鲁棒定价策略(附matlab代码)
激光雷达进入「规模化」上车周期?最大变数是什么?
AIGC: 2 语音转换新纪元-Whisper技术在全球客服领域的创新运用
JMeter笔记5 |Badboy使用和录制
08_原始套接字
问题解决:python接入支付宝沙箱问题处理
JVM线程安全
成都理工大学_Python程序设计_第9章
AVB(二):DTO 支持
2022哪个牌子的台灯质量好?双十一值得入手的好用护眼台灯推荐
- 原文地址:https://blog.csdn.net/ccsss22/article/details/127781275
