-
电动扳手设计(说明书+开题报告+英文文献及译文+cad图纸)
目 录
前 言 ……………………………………………………………………………1
第 1 章 设计任务分析 ……………………………………………………………2
1.1 设计任务 …………………………………………………………………2
1.2 设计意义 …………………………………………………………………2
第 2 章 方案设计 …………………………………………………………………3
2.1 基本结构的分析与选择 …………………………………………………3
2.2 总体方案的拟定 …………………………………………………………5
第 3 章 电动扳手的动力与运动分析计算 ………………………………………8
3.1 整机传动比的确定 ………………………………………………………8
3.2 各传动比的确定 …………………………………………………………8
3.3 谐波齿轮传动和行星轮系运动分析 ……………………………………9
第 4 章 传动部件的设计与校核…………………………………………………11
4.1 定轴轮系的设计…………………………………………………………11
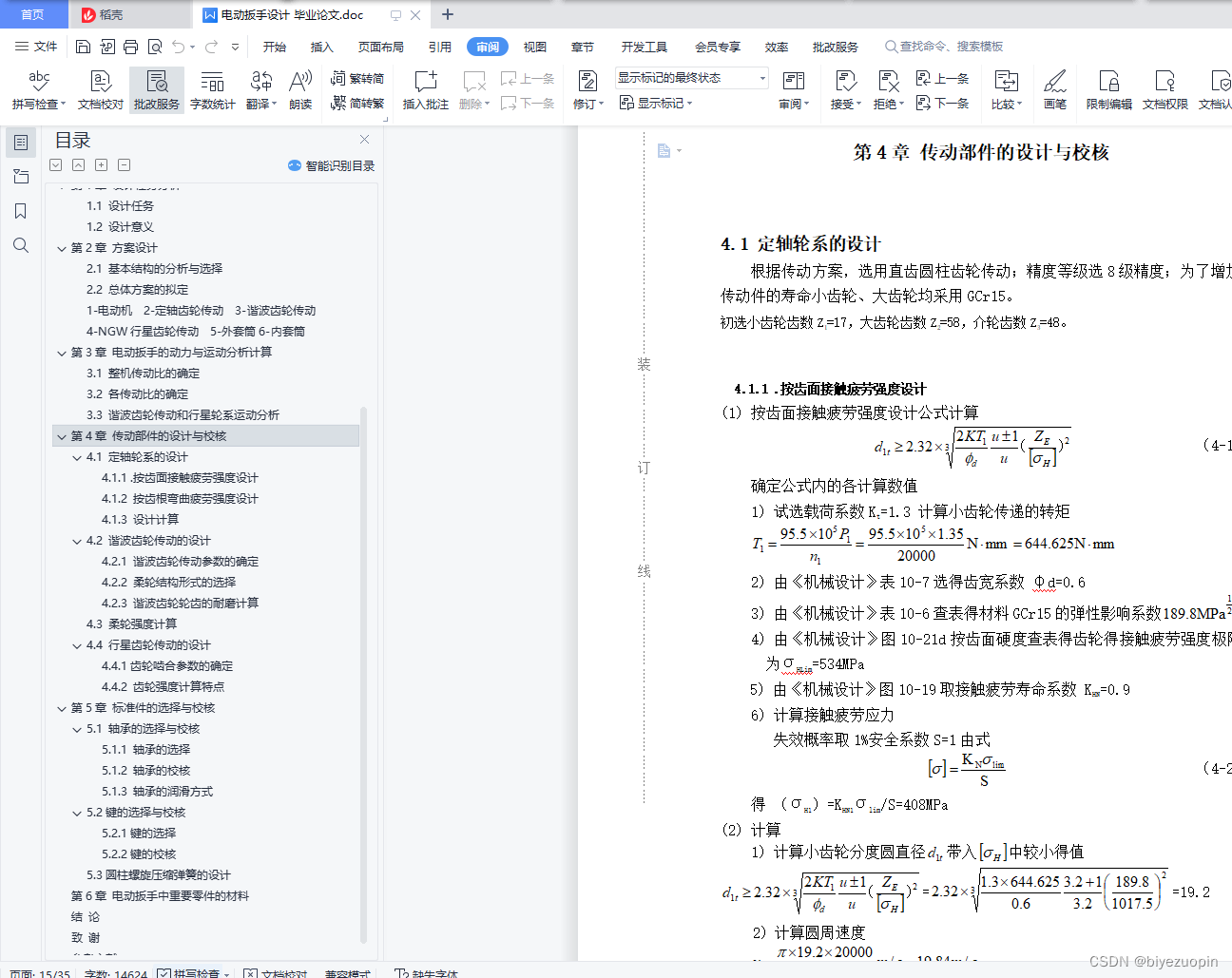
4.1.1 .按齿面接触疲劳强度设计 ……………………………………11
4.1.2 按齿根弯曲疲劳强度设计………………………………………12
4.1.3 设计计算…………………………………………………………13
4.2 谐波齿轮传动的设计……………………………………………………14
4.2.1 谐波齿轮传动参数的确定………………………………………14
4.2.2 柔轮结构形式的选择……………………………………………15
4.2.3 谐波齿轮轮齿的耐磨计算………………………………………15
4.3 柔轮强度计算……………………………………………………………16
4.4 行星齿轮传动的设计……………………………………………………17
4.4.1 齿轮啮合参数的确定……………………………………………17
4.4.2 齿轮强度计算特点 ……………………………………………17
第 5 章 标准件的选择与校核……………………………………………………21
5.1 轴承的选择与校核………………………………………………………21
5.1.1 轴承的选择………………………………………………………21
5.1.2 轴承的校核………………………………………………………22
5.1.3 轴承的润滑方式…………………………………………………22
5.2 键的选择与校核…………………………………………………………22
5.2.1 键的选择…………………………………………………………22
5.2.2 键的校核…………………………………………………………22
5.3 圆柱螺旋压缩弹簧的设计………………………………………………23
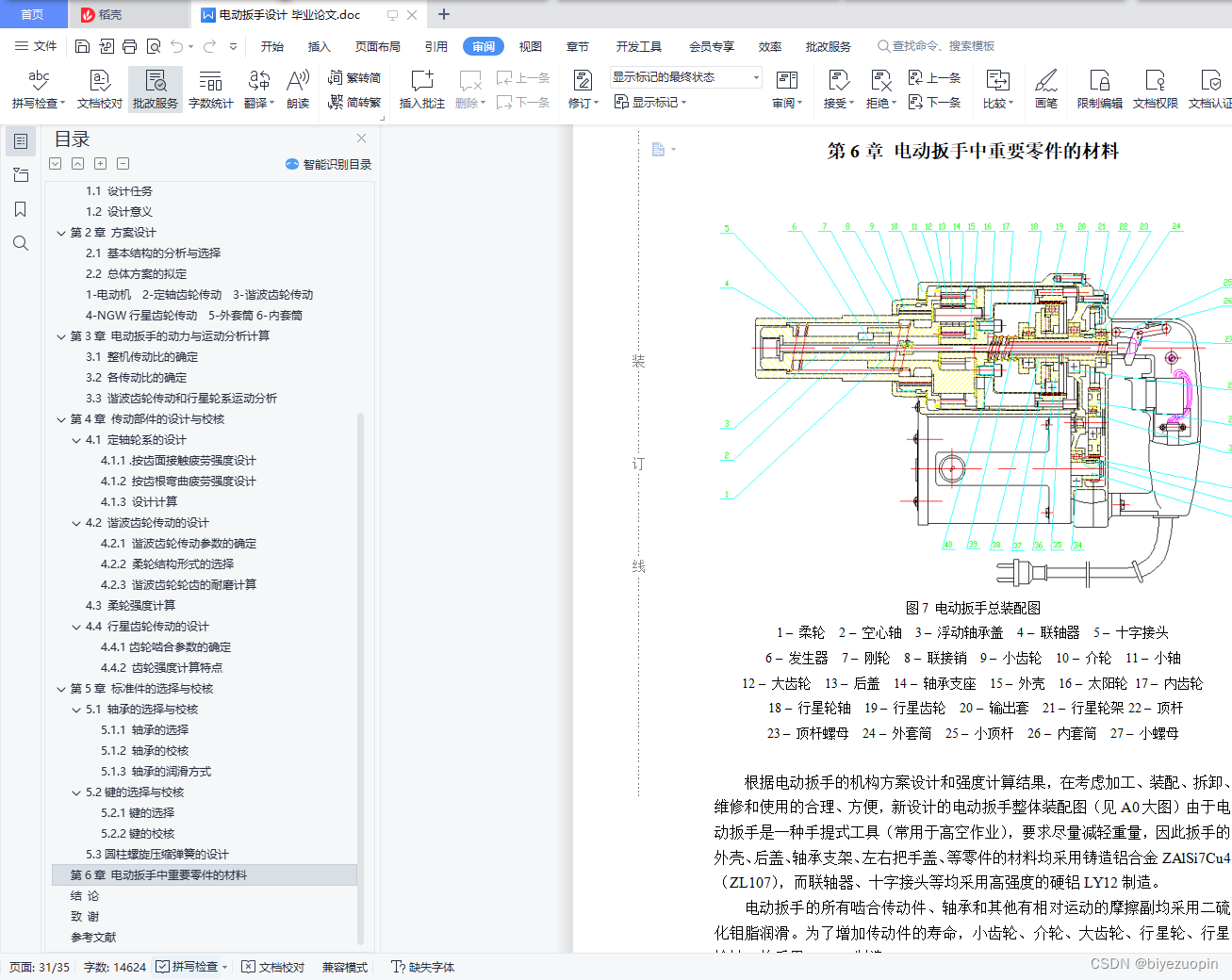
第 6 章 电动扳手中重要零件的材料……………………………………………27
结 论 ………………………………………………………………………………29
致 谢 ………………………………………………………………………………30
参 考 文 献 ………………………………………………………………………31
第1章 设计任务分析
1.1 设计任务
题目:电动扳手设计
参数:(1)电源电压:220V;
(2)输出最大力矩:1010N.m;
(3)一机多用:能适用于M16、M20、M22.和M24四种螺栓;
(4)每一工作循环时间:3~5s;
(5)电动扳手体积小,重量轻,操作简便,工作可靠。
具体要求:(1)通过阅读参考资料,现场调研,了解现有电动扳手的机构、组成及工作情况;了解电动扳手的工作原理并撰写开题报告;
(2)方案设计,根据查阅的资料提出若干解决问题的方案并加以讨论;
(3)进行电动扳手的总体设计,根据指导老师的要求做必要的计算;
(4)完成电动扳手的总装配图及典型零件图(共四张零号图纸);
(5)完成文献资料分析报告(含1——2篇外文翻译);
(6)撰写设计说明书一份。
1.2 设计意义
在大型钢结构建筑中,广泛使用高强度螺栓链接。这种螺栓连接,在施工中要求用规定的拧紧力矩锁紧螺母,以保证链接的可靠性。
由于高强度螺栓的材料和热处理是严格控制和检查的,因此螺栓定力矩切口处的扭剪断裂力矩能够控制在一个比较准确的范围,从而能保证螺栓连接的可靠性。当拧紧力矩过大时,不能保证螺栓的强度;当拧紧力矩过小时,又不能保证连接的可靠性。因此这种螺栓连接,在施工中要求用规定的拧紧力矩锁紧螺母,以保证链接的可靠性。另外,高强度螺栓往往成批使用,并且工作的环境也比较坚苦,如果是用普通扳手进行定力矩拧紧,工人拧紧螺母的过程中会有很多不便,工作效率也会很低。综合以上三点原因,在拧紧高强度螺栓时,我们采用电动扳手代替手从扳手进行拧紧。
电动扳手以220V交流电源为动力进行工作,可以保证每个螺栓的拧紧力都在规定的范围内,同时,采用电动扳手代替手动扳手可以大大提高螺栓拧紧的速度,提高工人的工作效率,改善工人的劳动强度。
第2章 方案设计
2.1 基本结构的分析与选择
电动扳手与机床、汽车等大型机器比较起来虽然比较小巧简单,但也是一种完整的机器,它应该由动力机、传动机构和工作机构组成。
根据前述设计任务要求,动力机应选用电源为220V的交流电机。
由于电动扳手为人工操作,因此电动机应该体积小、重量轻、绝缘好,以便于操作,并保证人身安全。大功率高转速防护式串激电机能基本满足这个要求。这种电机在制造中采用滴浸泡转子,电焊整流子等新工艺,外壳采用热固性工程塑料,电枢为接轴,从而形成双重绝缘结构,使用电安全有保证。
由于电动扳手工作时,需要内外套筒反转,因此要选择一组行星轮系。
渐开线行星齿轮传动按齿轮啮合方式可分为NGW、NW、ZUWGW、NN、WW、NGWN和N等类型。其中WW、NN、NGWN这三种类型的传动比可达到很大,但是传动效率也会随着传动比的增加而下降,而ZUWGW型行星齿轮传动主要用于差动装置,因此在电动扳手的设计中除去这四种类型而对其他三种类型进行比较。
动轴轮系的运动简图如下:

- NGW 2) NW 3) N
图1 NGW、NW和N型行星轮系简图









- NGW 2) NW 3) N
-
相关阅读:
C++——类和对象(中)(1)
【Nginx】负载均衡、动静分离理论篇
COMP1721 Object-Oriented Programming
shell脚本数组
Linux 部署Neo4j 并且创建自定义Service
20--栈与队列-有效的括号
【后端】PyCharm的安装指引与基础配置
Java也能做OCR!SpringBoot 整合 Tess4J 实现图片文字识别
ajax day4
一分钟教你学会浏览器调试工具debugger
- 原文地址:https://blog.csdn.net/sheziqiong/article/details/127769178