-
辅助治疗帕金森病机器人的可行性研究
摘 要:目前,研究发现:多巴胺的丢失对帕金森患者的疾病有严重影响。本文基于手关节运动的基本特征,研究通过外部作用力补偿患者手部运动的可行性。因此,辅助治疗机器人不仅需要精确地定位患者手部的运动,而且需要改善患者的手
部出现的不自主颤抖等症状。
关键词:帕金森病;辅助治疗机器人;多巴胺;手部;可行性0 引 言
目前,帕金森患者震颤症状还无法完全治愈。患者一般采用药物、手术等治疗方法,这些治疗手段不能阻止病情的发展。同时,对人体上肢震颤的机械特性进行了深入研究以后发现:震颤的人体上肢可视为一个二阶生物力学系统,该系统的输入为肌肉力矩,输出为上肢的位置。改变系统的阻尼值可以改变系统对外界激励的响应,因此应用抑震机器人对患者上肢施加可控阻尼,可以达到辅助治疗患者震颤的效果。1 辅助治疗机器人的应用与发展
康复机器人可分为辅助型和治疗型两种:辅助型康复机器人主要用来帮助老年人和患者更好地适应日常的生活,部分补偿了他们身体弱化和缺失的机体功能;治疗型康复机器人用来帮助患者恢复机体功能。目前,康复机器人的研究主要集中在机械手、智能轮椅和康复治疗机器人等几个方面。
辅助治疗型机器人主要是应用工程技术手段来帮组患者解决功能肌体障碍,提高患者的生活质量。2 国内外研究现状
2.1 国外研究状况
早期底座在固定结构上的机械手操作范围很小。后来的活动范围更大机械手,以牺牲机械手刚性和抓取精度为代价。为了解决以上缺点,目前最先进的机械手由各个系统模块组成,并且把所有模块都集成到移动机器人或者是自主的小车上。
在手部康复治疗领域,利用仿人机器人技术通过机器人关节的辅助治疗以帮助患者恢复丧失的肌体功能,同时让患者日常生活更加独立、方便。
2.2 国内研究状况
哈尔滨工业大学医工学实验室较早便在康复医疗领域进行研究,目前一共开发出了三代样机,其中,哈尔滨工业大学医工学实验室开发的一种早期的CPM机,该系统采用单自由度形式,模拟手指关节弯曲—伸展的连续运动,并保证设备作用力始终垂直于手指,从而避免对周围软组织的损伤,具有结构简单、集成度高、实用性强的特点,非常适合用于创伤手指的功能恢复。北京航空航天大学机器人研究所研发了一种外骨骼式康复手,该康复手采用绳索传动结构,通过力传感器和位置传感器实现力环和位置环的闭环控制,可以实现关节角度误差大约为1.5度。3 方案研究及可行性分析
3.1 分析系统的需求
本文基于粗集理论,从原有特征集表达知识系统的方法出发,讨论对于治疗系统根据特征描述的上近似、下近似概念,提出一种用去掉某些特征后对系统的影响来衡量该特征的影响能力的算法。通过淘汰那些对于治疗作用不大的特征选项,可以选出那些对于治疗最有效的特征,并能给出重要的相关特征的不同组合。从而实现机器人辅助治疗系统特征参数的优化选择。
根据帕金森患者治疗任务要求,设计出如图1所示的治疗机器人功能的原理图。该机器人主要由传感器输入、菜单设置、执行器、CPU主控等几部分组成。
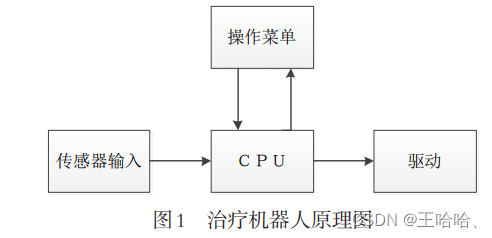
3.2 分析系统传感器
对于治疗帕金森病机器人来说,传感器系统决定了机器人是否智能和高效。一般来说,辅助治疗机器人的传感装置可分为内、外两种传感器。内部传感器能检测系统内部的信息,如温度、电机速度、电池电压等;外部传感器能检测距离、方向、声音、光线、热、电等。治疗机器人通过各种传感器将检测到的参数传递给中央处理器。通过对各个参数统筹处理来分析问题。所以,传感器信息之间的融合就相当关键。常用的信息融合方法主要有:加权平均、卡尔曼滤波、贝叶斯估计、模糊逻辑、证据推理、神经网络等。辅助治疗机器人能在部分未知或完全未知的环境中完成指定的任务,是因为能够利用传感器探测周围的环境,然后进行相应决策处理。使用多个传感器可以获得环境的多种特征。多传感器信息融合的能力是衡量辅助治疗机器人智能水平高低的重要条件之一。对于辅助治疗机器人实时控制系统来说,需要处理多种传感器信息,因而系统需要快速处理数据、运行较小的计算量、以及尽可能少的数据存储空间。手部的传感器通常用来检测患者手部运动学和动力学信息或者生物特征。例如:关节的角度、角速度或者角加速度信息;作用在手部震颤部位的力信息;患者手部的表面肌电信息。
常用的传感器分两大类:
(l) 机械类信号传感器,主要包括运动学传感器(角位移、角速度和角加速度、惯性传感器)和动力学传感器(肢体与机器人之间的相互作用力);
(2) 生物类信号传感器,这里特指用于测量人体生物信号的传感器,如表面肌肉电传感器、脑电传感器等。从实用化角度来说,这里重点强调应用表面肌肉电传感器。常用的方法就是将各个传感器固定在患者手部上或者由医师对患者进行直接测量。
3.3 康复平台设计
在设计机械结构设计时,不仅要考虑该结构能否完成各自的局部功能,而且要考虑各个结构通过协作求解多个全局功能,同时还要兼顾使其结构具有类似于人体结构的特征。手部结构主要由腕关节和肘关节组成。在机械设计上来说,腕关节的屈/伸运动和外展、内收运动都是可以实现的。而肘关节可以实现屈/伸运动和旋内/外运动。考虑到设计的目标和关节的驱动问题,肘关节的屈/伸运动和旋内/外运动都是必不可少的。随着科学技术的发展,设计出来的产品在能完成基本功能的基础上,人们越来越注重人体舒适度。所以,根据人体结构特征,设计出一个稳定、可靠、舒适的康复训练平台。机器人在实现驱动患者手指稳定运动,同时还可以在一定范围内调节机械手来适应患者手指长度和厚度。
3.4 控制模块的设计
根据基于行为的机器人学的基本思想,设计出的控制系统在满足实时性的同时还要有快速、稳定的响应。稳定可靠的硬件系统是数据高效传输和系统实时控制的基本保障。基于意法半导体(ST)STM32F407的ARM系列单片机和嵌入以uC/OS-II操作系统为核心自动化装备的控制平台,具有实时性和多任务特点。实现辅助治疗机器人在实时采集传感器数据和处理手部的运动参数的同时,满足集成度高、低功耗和便携性的设计要求。通过CAN高速总线与底层设备进行通信,可以同时实现对电机的驱动和力矩、关节位置的信号采样。由于康复机器人作用于人体组织或器官,所以它比一般工业机器人的精确度高,安全可靠,接口人性化。并且患者活动范围比较大,所以在机器人上使用蓄电池供电,这就要求机器人在不工作的时候尽可能降低电量的消耗,延长其工作时间。并且机器人行走和停止时要平稳,并且要有很小的转向半径。为了随时了解机械手的情况,保护人体不受伤害,在设计的时候必需要考虑力学反馈。在机械手抓起或托起物体时,要限制它的最大力。如果让机器人在无人操作的情况下自主执行一些简单的任务,具有一定的判断能力,可以安装传感器让机器人进行自主导航和图像识别。为了让机器人更加智能化,和谐的界面操作、精准的自动语音识别Automatic Speech Recogni⁃tion(ASR)和手势识别是必不可少的。这样才能让机器人更好地理解操作人员的意图,完成执行指定的任务。
本文用基于ARM Cortex-M4内核的STM32F407主控芯片实现。
 3.5 可靠性设计
3.5 可靠性设计
研究辅助治疗机器人系统的目的是实现对病人的辅助治疗,机械装置直接作用于人体,其可靠性显得尤其重要,所以要防止机器人在工作中发生可怕的灾难。
针对其工作的环境与模式,拟采取如下方法提高整机系统各个部件的可靠性:所有元器件、部件选用工业级,电机及其驱动器等关键部件选用军用级;所有部件均进行防水、防尘设计;机器人导航、定位采用现有多种成熟技术,如:工业级编码器、机械式校正等方式,以冗余检测与校正来提高其系统可靠性;机械手的电池选用中航锂电的工业级锂电池模块;利用传感器实时检测机器人关键部件的温度、电流、电压等状态参数,遇到异常会立即停检并向控制中心发出警报。4 结 论
改善帕金森病患者肢体功能的运动康复方法有很多,如神经生理促进技术为主的常规康复运动功能训练、平衡协调训练、功能性电刺激、步态训练、物理疗法等康复措施,这些康复治疗对肢体运动功能的改善也具有重要的意义。
本文研究了在机器人系统帮组下进行辅助治疗的可行性,通过优化设计出的机械手系统模拟正常人的运动规律,对恢复肢体功能的控制能力有一定的帮助作用。 -
相关阅读:
DevEco Studio中如何设置HarmonyOS/OpenHarmony应用开发
QGraphicsItem自定义绘制,drawContents绘制不出文字
什么是KEIL的微库(microlib)?
云存储服务是什么?
1876. 长度为三且各字符不同的子字符串
王学岗自定义ViewGroup在哪里获取控件
生死时速,分秒必争
人民法院报发文:虚拟货币属合法财产,涉案款物不可一律予以没收或者发还
Vue3.0(八):网络请求库axios
Python基础内容训练2(常用的数据类型-----字符串)
- 原文地址:https://blog.csdn.net/m0_48808835/article/details/127740522