-
数据结构考研第六章——图(内含动图)
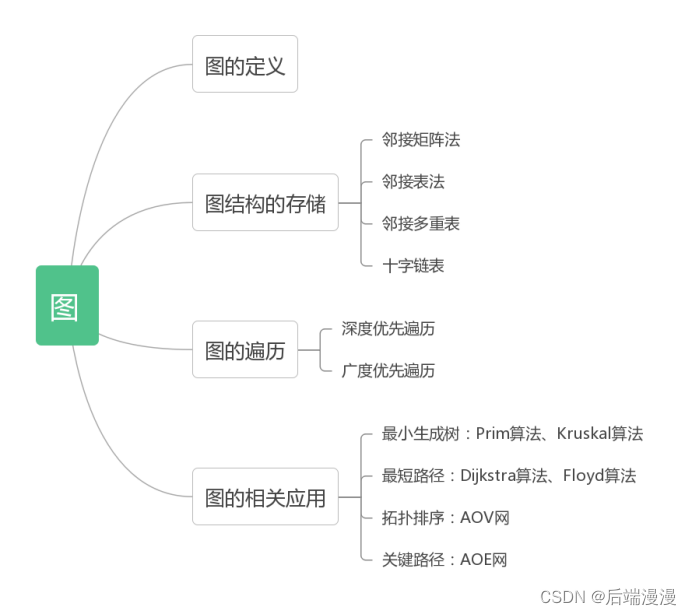
大纲要求:图的相关算法相对较多,通常只要求掌握其基本思想和实现步骤,而算法的具体实现不是重点。一、图的基本概念
- 图的概念:图G由顶点集V和边集E组成的,记为G=(V,E)
- 有向图:若E是有向边(也称为弧),则G为有向图
G=(V,E),其中V={1,2,3},E={<1,2>,<2,3>,<2,1>} - 无向图:若E是无向边(也称为边),则G为无向图
G=(V,E),其中V={1,2,3},E={(1,2),(2,3),(2,1)} - 简单图:不存在重复的边,不存在顶点到自身的边(数据结构仅讨论简单图)
- 多重图:存在重复的边,存在顶点到自身的边
- 完全图:对于无向图来说有n(n-1)/2条边,对于有向图来说有n(n-1)条边
- 连通:对于无向图来说,若顶点v到顶点w有路径存在,则称v和w是连通的
连通图:对于无向图来说,若任意两个顶点都连通,则称为连通图。否则称为非连通图。
连通分量:对于无向图来说,无向图中的极大连通子图称为连通分量 - 强连通:对于有向图来说,若顶点v到顶点w有路径存在,则称v和w是强连通的
强连通图:对于有向图来说,若任意两个顶点都连通,则称为强连通图。否则称为非强连通图。
强连通分量:对于有向图来说,有向图中的极大强连通子图称为强连通分量 - 生成树:包含图中全部顶点的一个极小连通子图。
极小连通子图是既要保持图的连通又要使得边数最少的子图。极大连通子图要求包含所有的边 - 度TD、出度ID、入度OD
顶点的度等于入度与出度之和
有向图的全部顶点的入度之和和出度之和相等,无向图没有出度和入度之分。
无向图的全部顶点的度的和等于边数的2倍,有向图也是。 - 网:带有权值的边的图称为网
- 稠密图:边数满足E>=VlogV的图。
稀疏图:边数满足E- 路径:顶点v到顶点w之间的顶点序列
路径长度:路径边上的数目
回路:第一个顶点和最后一个顶点相同的路径- 距离:两个顶点之间最短路径
- 有向树:一个顶点(作为根)入度为0,其余顶点(非根)入度为1的有向图
- 路径:顶点v到顶点w之间的顶点序列
二、图的存储结构
核心思想:紧扣 “图由点和边组成” 这一基本概念思考四种存储结构
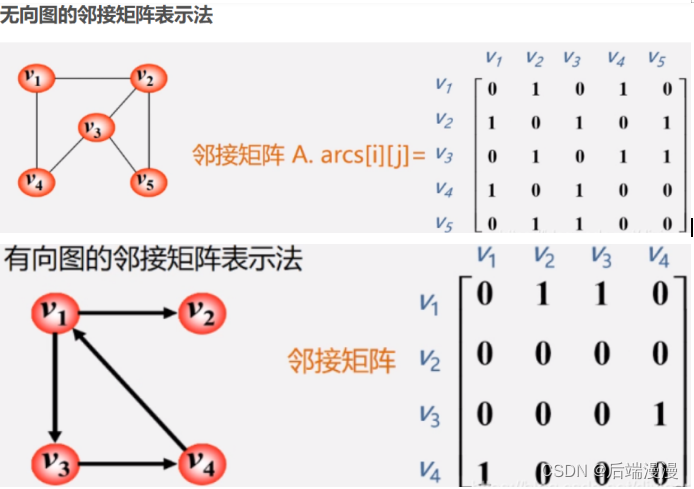
- 邻接矩阵法
【数据结构】
#define MaxVertexNum 100 typedef char VertexType; typedef int EdgeType; typedef struct{ VertexType Vex[MaxVertexNum]; //顶点表 EdgeType Edge[MaxVertexNum][MaxVertexNum]; //边表,邻接矩阵形式 int vexNum; //顶点数 int arcnum; //边数 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
【存储特点】
- 当邻接矩阵的元素仅表示相应边是否存在时,EdgeType可采用值为0和1;
当邻接矩阵的元素表示相应边的权值时,EdgeType需要表示具体权值; - 无向图的邻接矩阵是对称矩阵,对规模大的邻接矩阵可采用压缩存储;
邻接矩阵表示法的空间复杂度为O( n 2 n^2 n2),其中n为图的顶点数 - 适用范围:稠密图适合使用邻接矩阵的存储表示
【相关计算】
- 对于无向图,邻接矩阵的第i行(列)非零元素(非∞元素)的个数正好是顶点i的度TD
对于有向图,邻接矩阵的第i行非零元素(非∞元素)的个数正好是顶点i的出度OD,邻接矩阵的第i列非零元素(非∞元素)的个数正好是顶点i的入度TD - 设置图G的邻接矩阵为A, A n A^n An的元素 A n [ i ] [ j ] A^n[i][j] An[i][j]等于由顶点i到顶点j的长度为n的路径的数目
- 邻接表法
【数据结构】
#define MaxVertexNum 100 typedef struct ArcNode{ //边表结点 int adjvex; //该弧所指向的顶点的位置 struct ArcNode *next; //指向下一条弧的指针 }ArcNode; typedef struct VNode{ //顶点表结点 VertexType data; //顶点信息 ArcNode *first; //顶点的第一条弧的指针 }VNode,AdjList[MaxVertexNum]; typedef struct{ AdList vertices; //邻接表 int vexnum,arcnum; //图的顶点数和边数 }ALGraph;- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13

【存储特点】
- 适用范围:稀疏图适合使用邻接表法的存储表示
- 邻接表法的空间复杂度:无向图的空间复杂度为O(V+2E),有向图的空间复杂度为O(V+E)
- 在邻接表中,给定一顶点,能很容易找出它的所有邻边,因为只需要读取它的邻接表,时间复杂度远小于O(n);而在邻接矩阵则需要扫描一行,时间复杂度为O(n).
在邻接表中,确认两个顶点是否存在边,则需要在边链表上依次查找,时间复杂度为O(n);而在邻接矩阵则可以通过A[i][j]元素查到,时间复杂度为O(1). - 在有向图的邻接链表中,求一个顶点的出度只需要计算其邻接表中的结点个数;但求其顶点的入度则需要遍历全部的邻接表。后者可以采用逆邻接表来加速求解。
- 图的邻接表表示并不唯一
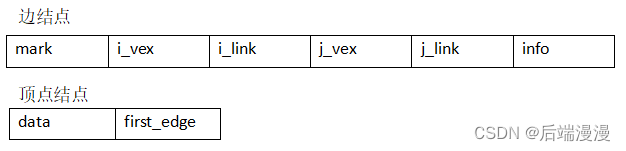
- 十字链表法(只用于有向图)
【数据结构】 这种存储结构要从边的特点出发定义
- 弧的两个端点:弧头和弧尾
- 弧的分类:弧头相同的弧链接在一起,弧尾相同的弧链接在一起。


【存储特点】
- 在十字链表中,既容易找到V为尾的弧,又容易找到V为头的弧,因而容易求得顶点得出度和入度。
- 邻接多重表(只用于无向图)
【数据结构】
【数据结构】 这种存储结构要从边的特点出发定义- 边的两个端点:弧头和弧尾
- 边的分类:依附在相同顶点的边链接在一起。

三、图的基本操作
基本操作 :图的基本操作是独立于图的存储结构的,而对于不同的存储方式,操作算法的具体实现会有着不同的性能。在设计具体算法的实现时,应考虑采用何种存储方式的算法效率会更高。
- Adjacent(G,x,y):判断图G是否存在边
- Neighbors(G,x):列出图G中与结点x邻接的边
- InsertVertex(G,x):在图G中插入顶点x
- DeleteVertex(G,x):在图G中删除顶点x
- AddEdge(G,x,y):若无向边(x,y)或者有向边
- RemoveEdge(G,x,y):若无向边(x,y)或者有向边
- FirstNeighbor(G,x):求图G中第一个邻接点,若有则返回顶点号。若x没有邻接点或图中不存在x,则返回-1.
- NextNeighbor(G,x,y):假设图G中顶点y是顶点x的一个邻接点,返回除y外顶点x的下一个邻接点的顶点号。若没有则返回-1;
- Get_edge_value(G,x,y):获取权值
- Set_edge_value(G,x,y):设置权值
四、图的遍历算法
- 广度优先搜索BFS
【算法思想】
- 首先从未被访问的顶点v开始,接着由顶点v出发,依次访问v的各个未被访问过的邻接顶点w1,w2,w3…,然后依次访问w1,w2,w3…未被访问过的邻接结点,直到没有邻接结点为止。
- 如果图中尚有未被访问过的结点,则另选择一个未曾被访问过的顶点作为始点,重复上述过程。
【代码实现】 (辅助队列+非递归算法)
bool visited[MAX_VERTEX_NUM]; void BFSTraverse(Graph G){ for(int i=0;i<G.vexnum;++i){ visited[i]=FALSE; } InitQueue(Q); for(i=0;i<G.vexnum;++i) if(!visited[i]) BFS(G,i) } void BFS(Graph G,int v){ visit(v); visited[v]=TRUE; Enqueue(Q,v); while(!isEmpty(Q)){ DeQueue(Q,V); for(w=FirstNeighbor(G,v);w>=0;w=NextNeighbor(G,v)){//如果为空,会返回-1 if(!visited[w]){ visit(w); visited(w)=TRUE; EnQueue(Q,w); } } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
【具体实例】

【算法分析】- 空间复杂度:最坏的情况下空间复杂度为O(V)
- 时间复杂度:邻接表时间复杂度为O(V+E)=顶点访问时间O(V)+边访问时间O(E),邻接矩阵时间复杂度为O( V 2 V^2 V2)
【BFS算法求解单源最短路径问题】 (注意与Dijkstra算法的区别)
void BFS_MIN_Distance() { for(i=0;i<G.vexnum;++i) d[i]=∞; visited[u]=TRUE; d[u]=0; EnQueue(Q,u); while(!IsEmpty(Q)){ DeQueue(Q,u); for(w=FirstNeighbor(G,u);w>=0;w=NextNeighbor(G,u,w)) if(!visited[w]){ visited[w]=TRUE; d[w]=d[u]+1; //整个算法的精髓 EnQueue(Q,w); } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
【广度优先生成树】
- 在广度遍历的过程中,我们可以得到一棵遍历树,称为广度优先生成树
- 由于邻接矩阵表示唯一,所以生成树也是唯一的
- 由于邻接表存储表示不唯一,所以生成树也是不唯一的
- 深度优先搜索
【算法思想】
- 首先访问图中某一起始顶点v,然后从v出发,访问与v邻接且未被访问的任一顶点w1,再访问与w1邻接且未被访问的任一顶点w2…重复上述过程。当不能再继续向下访问时,依次退回到最近被访问的顶点。
- 若还有尚未被访问的顶点,则从该顶点开始继续上述搜索过程。
【代码实现】
bool visited[MAX_VERTEX_NUM]; void BFSTraverse(Graph G){ for(int i=0;i<G.vexnum;++i){ visited[i]=FALSE; } for(i=0;i<G.vexnum;++i) if(!visited[i]) BFS(G,i) } void DFS(Graph G,int v){ visit(v); visited[v]=TRUE; for(w=FirstNeighbor(G,v);w>=0;w=NextNeighbor(G,v,w)) if(!visited[w]) DFS(G,w) //精髓:直接选用了新结点来寻找邻接结点,这就成了深度遍历了 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
【具体实例】
【算法分析】- 空间复杂度:使用了递归工作栈,故空间复杂度为O(V)
- 时间复杂度:邻接表时间复杂度为O(V+E)=顶点访问时间O(V)+边访问时间O(E),邻接矩阵时间复杂度为O( V 2 V^2 V2)
【深度优先生成树】
- 在深度遍历的过程中,我们可以得到一棵遍历树,称为深度优先生成树
- 由于邻接矩阵表示唯一,所以生成树也是唯一的
- 由于邻接表存储表示不唯一,所以生成树也是不唯一的
- 图的遍历
- 对于无向图来说,两个函数调用BFS(G,i)和DFS(G,i)的次数等于该图的连通分量数。
- 对于有向图来说,两个函数调用BFS(G,i)和DFS(G,i)的次数等于该图的强连通分量数。
五、图的应用
- 最小生成树
【概念特性】
- 概念:权值之和最小的生成树
- 特性:最小生成树不是唯一的,但是最小生成树的边的权值之和是唯一的。
【Prim算法】
- 算法思想:初始时从图中任选一个顶点加入树T,此时树中只含有一个顶点,之后选择一个与当前T中顶点集合距离最近的顶点,并将该顶点和相应的边加入T,每次操作后T中的顶点数和边数都增1.
- 算法分析:时间复杂度为O( V 2 V^2 V2),因为n个顶点,每个顶点有n-1条边比较大小。
- 适用范围:边稠密的图
- 具体实例

【Kruskal算法】- 算法思想:初始时为只有n个顶点而无边的非连通图T={V,{}},每个顶点自成一个连通分量,然后按照边的权值由小到大的顺序,不断选取当前未被选取过且权值最小的边,若该边依附的顶点落在T中不同的连通分量上(即不形成环路),则将此边加入T,否则舍弃此边而选择下一条权值最小的边。直至T中所有顶点都在一个连通分量上。
- 算法分析:时间复杂度为O( E l o g E ElogE ElogE)
- 适用范围:边稀疏的图
- 具体实例
- 最短路径
【Dijkstra算法:实现单源最短路径问题】 (带正权无向图、带正权有向图)
- 算法介绍:Dijkstra算法应用了贪心算法思想,是目前公认的最好的求解最短路径的方法。算法解决的是有带权无向图、带权有向图中单个源点到其他顶点的最短路径问题。
- 辅助数组
dist[]:记录从源点 v 0 v_0 v0到其他各顶点当前的最短路径长度。
path[]:path[i]表示源点到顶点i之间的最短路径的前驱结点。 - 算法思想:
设置一个集合S记录已求得的最短路径的顶点,初始时把源点 v 0 v_0 v0放入S;
集合S每并入一个新顶点 v i v_i vi,都要修改源点 v 0 v_0 v0到集合V-S中顶点当前的最短路径长度值; - 算法特点:使用邻接矩阵的时间复杂度为O( V 2 V^2 V2),并且不适用于权值带负数的情况
- 具体实例

【Floyd算法:各顶点之间最短路径问题】(带正负权无向图、带正负权有向图)
【算法思想】
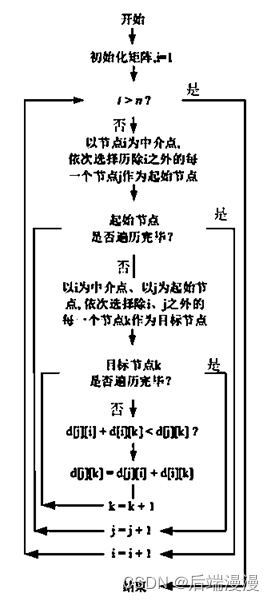
【代码实现】
//核心代码 for(int k=0;k<n;k++) //中转结点 for(int i=0;i<n;i++) //起始结点 for(int j=0;j<n;j++) //终点 if(d[i][j]>d[i][k]+d[k][j]) d[i][j]=>d[i][k]+d[k][j];- 1
- 2
- 3
- 4
- 5
- 6
【具体实例】

【算法分析】
- 时间复杂度:根据核心代码不难得出时间复杂度为O( V 3 V^3 V3).
- 使用范围:带正负权无向图、带正负权有向图,但是不允许含带负权值的边组成的回路。
- 有向无环图DAG描述表达式 (描述含有公共子式的表达式的有效工具)
【使用真题演示】

- 拓扑排序
【基本概念】
- AOV网:带权有向无环图 表示活动的网络,记为AOV网
- 活动:每个顶点代表一个活动
- 事件:每条边代表一个事件
【算法思想】
- 从AOV网中选择一个没有前驱的顶点并输出
- 从网中删除该顶点和所有以它为起点的有向边
- 重复步骤1和步骤2直到当前AOV网为空
【代码实现】
bool TopoLogicalSort(Graph G){ InitStack(S); for(int i=0;i<n;i++){ if(indegree[i]=0) Push(S,i) } int count=0; //用来计数是否全部结点拓扑完毕 while(!IsEmpty(S)){ Pop(S,i); print[count++]=i; for(p=G.vertices[i].firstarc;p;p=p->nextarc){ //这个for循环是核心 v=p->adjvex; if(!(--indegree[v])) Push(S,v); } } if(count<G.vexnum) return false; //排序失败,有向图中有回路 else return true; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
【算法分析】
- 时间复杂度:邻接表时间复杂度为O(V+E),邻接矩阵时间复杂度为O( V 2 V^2 V2)
- 唯一性:若顶点有多个后继,则拓扑排序算法不唯一;若顶点有多个后继,则拓扑排序算法唯一
- 关键路径 (完成整个工程的最短时间就是关键路径的长度)
【基本概念】
- 源点:入度为0的顶点称为源点
- 汇点:出度为0的顶点称为汇点
- 关键路径:从源点到汇点的所有路径中,具有最大路径长度的路径称为关键路径
- 事件vk的最早发生时间ve(k):ve(k)=Max{ve(j)+Weight( v j v_j vj, v k v_k vk)},从源点v1到顶点vk的最长路径长度
- 事件vk的最迟发生时间vl(k):vl(k)=Min{vl(j)-Weight( v k v_k vk, v j v_j vj)},即选择最大的一段后退距离
- 活动ai的最早发生时间e(i):若边< v k v_k vk, v j v_j vj>表示活动 a i a_i ai,则有e(i)=ve(k);
- 活动ai的最迟发生时间l(i):若边< v k v_k vk, v j v_j vj>表示活动 a i a_i ai,则有l(i)=vl(j)-Weight( v k v_k vk, v j v_j vj);
- 一个活动ai的最迟开始时间l(i)和最早开始时间e(i)的差额:d(i)=l(i)-e(i)
【算法思想】
- 从源点出发,令ve(源点)=0,按拓扑排序求其余顶点的最早发生时间ve();
- 从汇点出发,令vl(汇点)=ve(汇点),按逆拓扑排序求其余顶点的最迟发生时间vl();
- 根据各顶点的ve()值求所有弧的最早开始时间e();
- 根据个顶点的vl()值求所有弧的最迟开始时间l();
- 求AOE网中所有差额d(),找出所有d()=0的活动构成关键路径
【具体实例】
关键路径为( v 1 v_1 v1, v 3 v_3 v3, v 4 v_4 v4, v 6 v_6 v6)

【特点】
- 关键路径上的所有活动都是关键活动,它是决定整个工程的关键因素,因此可通过加快关键活动来缩短整个工程的工期。但也不能任意缩短关键活动,因为一旦缩短到一定的程度,该关键活动就可能会变成非关键活动。
-
相关阅读:
set(CMAKE_BUILD_TYPE debug 和 set(CMAKE_CXX_FLAGS -g的用途是一样的吗
struts2绕过waf读写文件及另类方式执行命令
C#基础详解(上)
linux下磁盘分区和逻辑卷管理
OnionArch - 如何实现更新指定字段的通用Handler
docker安装elasticsearch、kibana
Kettle需求场景复现
DDPM的学习
03_SpingBoot 核心配置文件
linux 简单处理 设备没有空间
- 原文地址:https://blog.csdn.net/m0_46638350/article/details/127718848
