-
I/O多路复用详解
I/O多路复用详解
什么是I/O多路复用
-
I/O模型是指网络I/O模型
是服务端如何管理连接,如何请求连接的措施,是用一个进程管理一个连接(PPC),还是一个线程管理一个连接(TPC),亦或者一个进程管理多个连接(Reactor)
-
IO多路复用中多路就是多个TCP连接(或多个Channel),复用就是指复用一个或少量线程
是多个网路IO复用一个或少量线程来处理这些连接
为什么要多路复用
-
高性能
无论写一行代码还是做一个系统,都希望能够达到高性能的效果
高性能可以从两个方面考虑:
- 单机性能,将单服务器的性能发挥到极致
- 多机性能,设计服务器集群方案
-
单机高性能的关键之一就是服务器采取的网络编程模型
服务器如何管理连接,如何处理请求?
- I/O模型:阻塞、非阻塞、同步、异步
- 进程模型:单进程、多进程、多线程
常见I/O模型
- 同步阻塞IO(Blocking IO):即传统IO模型
- 同步非阻塞IO(Non-blocking IO):默认常见的socket都是阻塞的,非阻塞IO要求socket被设置成NONBLOCK
- IO多路复用(IO Multiplexing):即经典的Reactor设计模式,也被称为异步阻塞IO,Java中的selector和linux中的epoll都是这种模型
- 异步IO(Asychronous IO):即Proactor设计模式,也被称为异步非阻塞IO
同步和异步是指内核通知用户线程的方式。
-
用户进程/线程和内核是以传输层为分割线的
传输层以上是指用户进程
传输层以下(包括传输层)是指内核(处理所有通信细节,发送数据,等待确认,给无序到达的数据排序等,这四层是操作系统内核的一部分)
-
同步
用户线程发起IO请求后需要等待或者轮询内核IO操作,完成后才能继续执行
-
异步
用户线程发起IO请求后仍继续执行,当内核IO操作完成后回通知用户线程,或调用用户线程注册的回调函数。
阻塞和非阻塞是指用户线程调用内核IO操作的方式。
-
阻塞
IO操作需要彻底完成后才能返回用户空间
-
非阻塞
IO操作被调用后立即返回给用户一个状态值,无需等待IO操作彻底完成
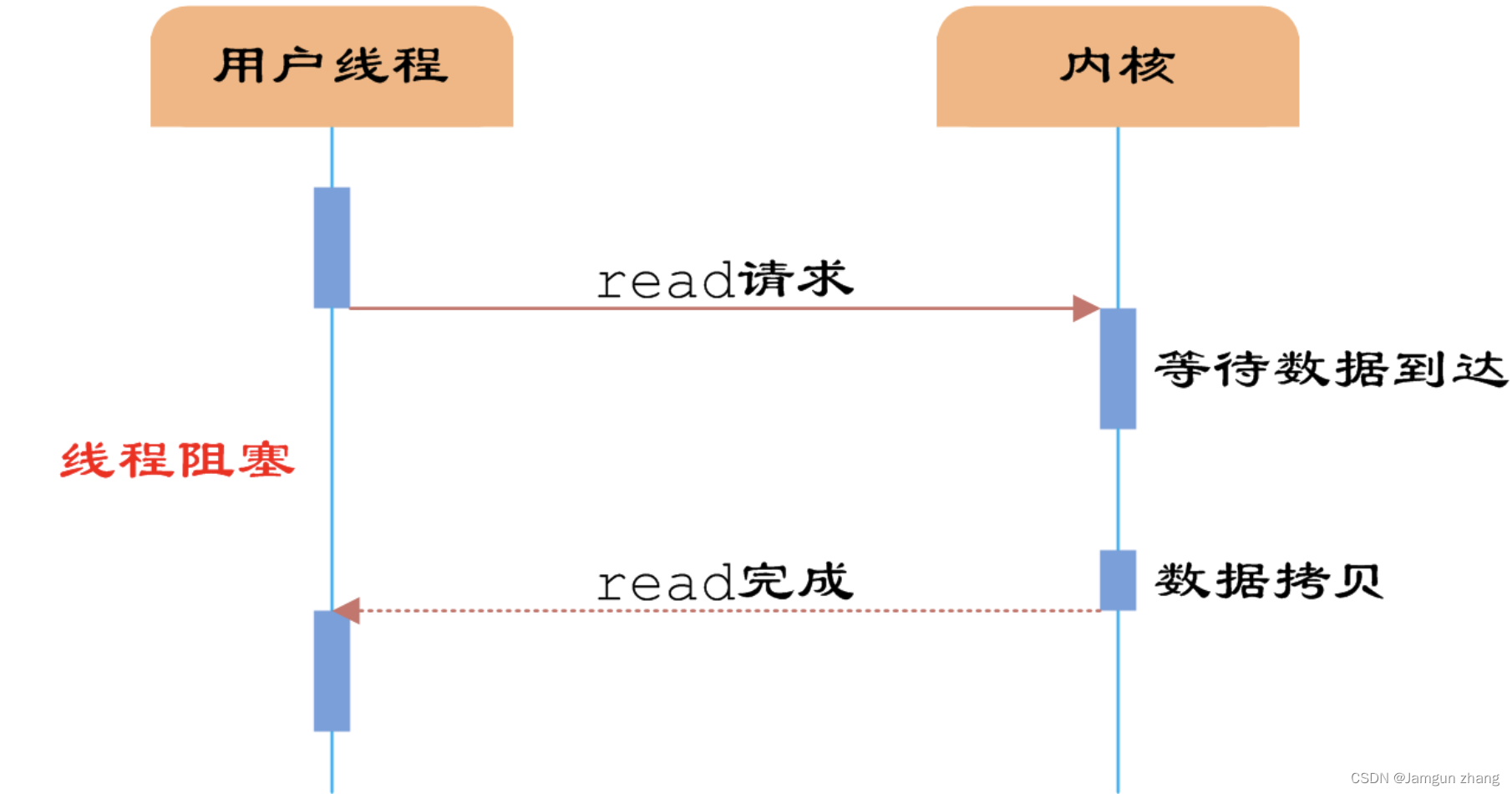
同步阻塞IO
- 最简单的IO模型
- 用户线程在内核进行IO操作时被阻塞
- 用户线程通过调用系统调用read发起IO读操作,由用户空间转到内核空间。内核等到数据包到达后,然后将接受的数据拷贝到用户空间,完成read操作。整个IO请求过程,用户线程都是被阻塞的,对CPU利用率不够
同步非阻塞IO
-
在同步基础上,将socket设置为NONBLOCK,用户线程可以在发起IO请求后立即返回
-
立即返回,但并未读到任何数据
-
用户线程需要不断的发起IO请求,直到数据到达后才能真正读到数据,然后去处理
-
同步的,为了等到数据,需要不断的轮询、重复请求,消耗了大量的CPU资源。实际用处不大

IO多路复用
-
一个或一组线程(线程池)处理多个TCP连接
-
IO多路复用使用两个系统调用(select/poll/epoll和recvfrom),blocking IO只调用了recvfrom
-
select/poll/epoll核心是可以同时处理多个connection,而不是更快,所以连接数不高的话,性能不一定比多线程+阻塞IO好。
-
select是内核提供的多路分离函数,使用它可以避免同步非阻塞IO中轮询等待问题。
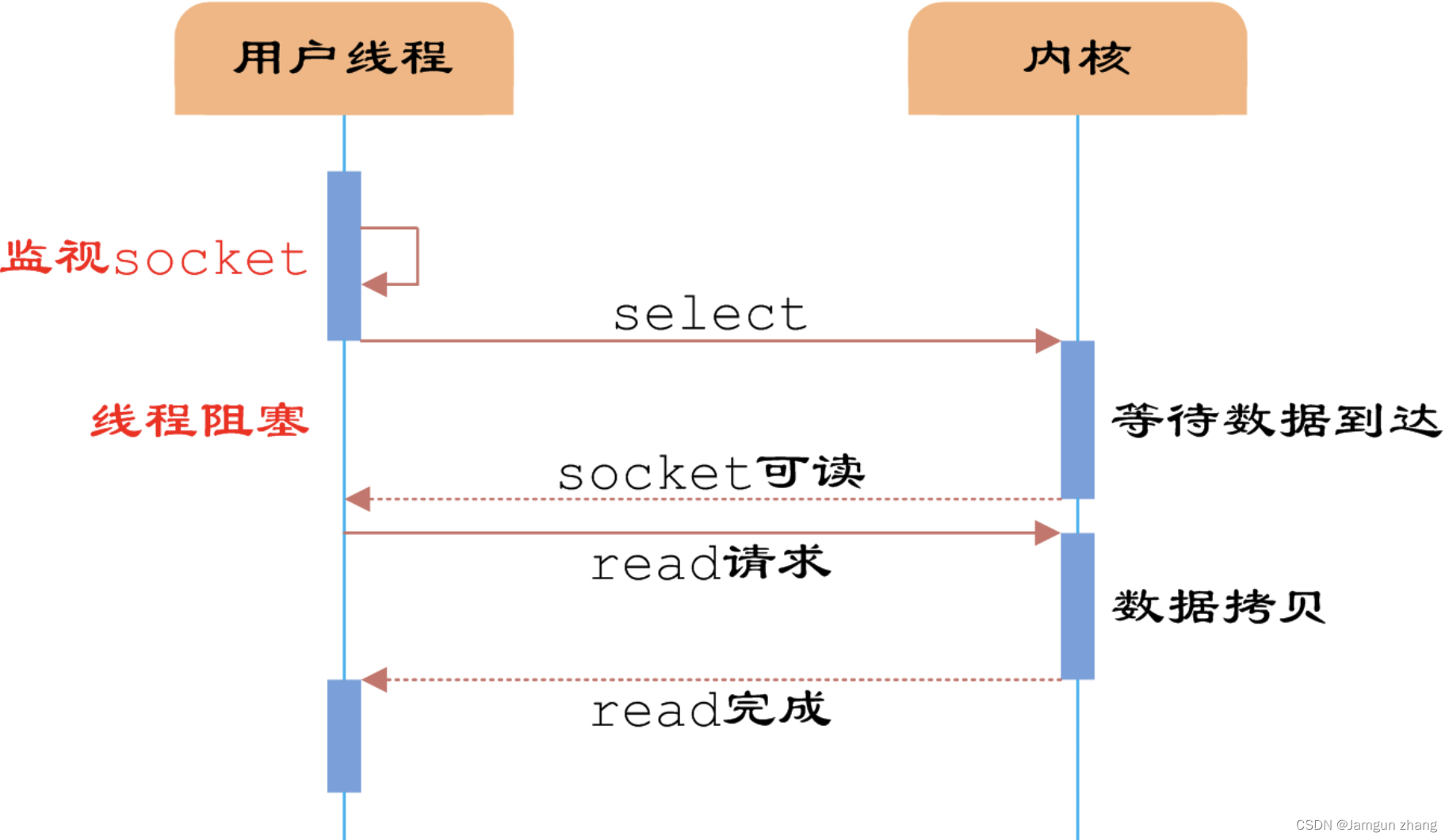
流程:
- 将需要进行IO操作的socket添加到select中,然后阻塞等待select系统调用返回
- 当数据到达时,socket被激活,select函数返回,用户线程正式发起read请求,读取数据并继续执行
同一个线程同时处理多个IO请求:
-
这种方式和同步阻塞IO并没有太大区别,还多了添加监视socket以及调用select函数的额外操作,效率更差
-
用户可以在一个线程内同时处理多个socket的IO请求,这就是它的最大优势。用户可以注册多个socket,然后不断调用select读取被激活的socket
-
同步阻塞模型中,必须通过多线程方式才能达到这个目的
所以IO多路复用设计目的其实不是为了快,而是为了解决线程/进程数量过多对服务器开销造成的压力。
select的缺点:
- 每个IO请求的过程还是阻塞的(在select函数上阻塞),平均时间甚至比同步阻塞IO模型还要长
- 如果用户线程只注册自己感兴趣的socket,然后去做自己的事情,等到数据到来时在进行处理,则可以提高CPU利用率
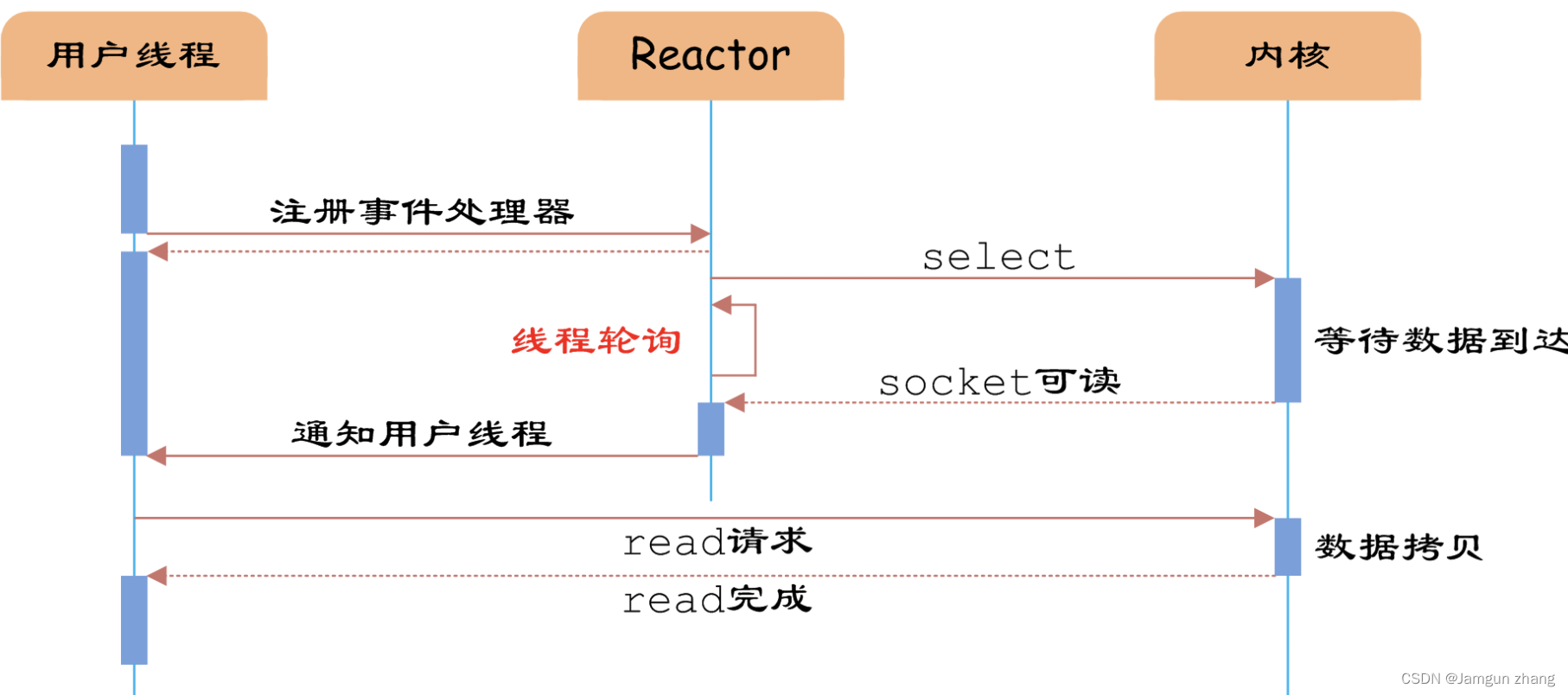
通过Reactor方式,用户线程轮询IO操作状态的工作统一交给handle_events事件循环处理。用户线程注册事件处理器之后可以继续执行做其他的工作(异步),而Reactor线程负责调用内核的select函数检查socket状态。当有socket被激活时,则通知相应的用户线程(或执行用户线程的回调函数),执行handel_envent进行数据的读取、处理工作。
由于select函数是阻塞的,因此多路IO复用模型就被称为异步阻塞IO模型,这里阻塞不是指socket。因为使用IO多路复用时,socket都设置NONBLOCK,不过不影响,因为用户发起IO请求时,数据已经到达了,用户线程一定不会被阻塞。
IO多路复用是最常用的IO模型,但其异步程度还不彻底,因为它使用了回阻塞线程的select系统调用。因此IO多路复用只能称为异步阻塞IO,而非真正的异步IO。
异步非阻塞IO
在IO多路复用模型中,事件循环文件句柄的状态事件通知给用户线程,由用户线程自行读取数据、处理数据。而异步IO中,当用户线程收到通知时候,数据已经被内核读取完毕,并放在了用户线程指定的缓冲区内,内核在IO完成后通知用户线程直接使用就行了。因此这种模型需要操作系统更强的支持,把read操作从用户线程转移到了内核。
相比于IO多路复用模型,异步IO并不十分常用,不少高性能并发服务程序使用IO多路复用+多线程任务处理的架构基本可以满足需求。不过最主要原因还是操作系统对异步IO的支持并非特别完善,更多的采用IO多路复用模拟异步IO方式(IO事件触发时不直接通知用户线程,而是将数据读写完毕后放到用户指定的缓冲区)。
select、poll、epoll详解
- select,poll,epoll都是IO多路复用的机制
- 异步阻塞IO,但select,poll,epoll本质上都是同步IO,因为它们都需要在续写事件就绪后自己负责进行读写,也就是说这个读写过程是阻塞的,而真正意义上的异步IO无需自己负责进行读写。
select
int select(int n, fd_set *readfds, fd_set *writefds, fd_set *exceptfds, struct timeval *timeout);- 1
- 监视的文件描述符有三类,readfds,writefds,exceptfds
- 调用后函数会阻塞,直到有描述符就绪(有数据读、写、或者有except),或者超时(timeout指定时间,如果立即返回设置null),函数返回
- 当select函数返回后,可以通过遍历fdset,来找到就绪的描述符。
优点:
- 良好的跨平台性。
缺点:
- 单个进程能够监视的文件描述符的数量存在最大限制
- 在Linux上为1024
- 可以通过修改宏定义甚至重新编译内核的方式提升这一限制,但这样会造成效率的降低
- 每次调用 select,都需要把 fd 集合从用户态拷贝到内核态,这个开销在 fd 很多时会很大
- 对 socket 扫描时是线性扫描,采用轮询的方法,效率较低(高并发)
poll
int poll(struct pollfd *fds, unsigned int nfds, int timeout); struct pollfd{ int fd; short events; short revents; };- 1
- 2
- 3
- 4
- 5
- 6
- 使用一个pollfd的指针实现
- pollfd结构包含了要监视的event和发生的event
- pollfd并没有最大数量的限制(但数量过大性能也会下降)
- poll返回后,需要遍历pollfd来或许就绪的描述符
缺点
- 每次调用 poll ,都需要把 fd 集合从用户态拷贝到内核态,这个开销在 fd 很多时会很大;
- 对 socket 扫描是线性扫描,采用轮询的方法,效率较低(高并发时)
epoll
每一个epoll对象都有一个独立的eventpoll结构体,用于存放通过epoll_ctl方法向epoll对象中添加进来的事件。这些事件都会挂载在红黑树中,如此,重复添加的事件就可以通过红黑树而高效的识别出来(红黑树的插入时间效率是lgn,其中n为红黑树元素个数)。
而所有添加到epoll中的事件都会与设备(网卡)驱动程序建立回调关系,也就是说,当相应的事件发生时会调用这个回调方法。这个回调方法在内核中叫ep_poll_callback,它会将发生的事件添加到rdlist双链表中,在epoll中,对于每一个事件,都会建立一个epitem结构体,如下所示:
struct epitem{ struct rb_node rbn;//红黑树节点 struct list_head rdllink;//双向链表节点 struct epoll_filefd ffd; //事件句柄信息 struct eventpoll *ep; //指向其所属的eventpoll对象 struct epoll_event event; //期待发生的事件类型 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
当调用epoll_wait检查是否有事件发生时,只需要检查eventpoll对象中的rdlist双链表中是否有epitem元素即可。如果rdlist不为空,则把发生的事件复制到用户态,同时将事件数量返回给用户。
优点
-
没有最大并发连接的限制,能打开的FD的上限远大于1024(1G的内存上能监听约10万个端口);
-
效率提升,不是轮询的方式,不会随着FD数目的增加效率下降。
只有活跃可用的FD才会调用callback函数,只管理“活跃”的连接,而跟连接总数无关
-
内存拷贝,利用mmap()文件映射内存加速与内核空间的消息传递;即epoll使用mmap减少复制开销。
epoll缺点
- epoll只能工作在 linux 下
对于其他的IO模型比如IOCP或者kqueue之后再做补充
-
-
相关阅读:
【Java编程进阶】运算符与表达式
Kafka在企业级应用中的实践
工业用电监测管理系统_企业用电监测管理系统_能源监管监控管理系统
6.2 窗口句柄映射
PostgreSQL 难搞的事系列 --- vacuum 的由来与PG16的命令的改进 (1)
MySQL数据库
[COCI2021-2022#1] Logičari
环形均分纸牌问题
学习太极创客 — MQTT 第二章(九)本章测试
【精选】Ajax技术知识点合集
- 原文地址:https://blog.csdn.net/weixin_40058501/article/details/127722719