-
【单片机】C51中的I2C操作-Proteus+Keil4+C语言实现
51单片机中I2C读写操作
开发板:普中51-单核-A2;
I2C器件-EEPROM:AT24C02、FM24C02(仿真EEPROM);
仿真软件:proteus;
开发环境:Keil4;
参考资料:开发板所附视频;
如有错误,感谢指正。如有侵权请联系博主。
首先需要了解I2C是什么。
1. I2C是什么
I2C是Inter-Integrated circuit的简称,飞利浦公司于1980年代提出,为了让主板、嵌入式系统或手机用以连接低速周边外部设备而发展。I2C具备多主机系统需要的总线裁决、高低速器件同步等功能,是一种高性能的串行总线。
串行总线用于串行通信,串行通信速率低,在数据通信吞吐量不是很大的微处理器中比较简易、方便、灵活;
并行总线用于并行通信,并行通信速度快,实时性好,但是占用的口线多,不适于小型化产品;
更多关于总线的内容可以参考:总线的定义, 并行总线和串行总线。
I2C允许相当大的工作电压,典型的电压基准为+3.3V或+5V。
I2C总线有两根双向信号线:
SDA和SCL,SDA是数据线,用来传送数据;SCL是时钟线,用来传输CLK时钟信号,主设备向从设备发送。如下所示,在I2C总线上可以连接多个器件,通常这些器件中有一个是主器件,其它的是从器件。
每个接到I2C总线上的器件都有唯一的地址,可以通过该地址识别主机想要通信的是哪个器件。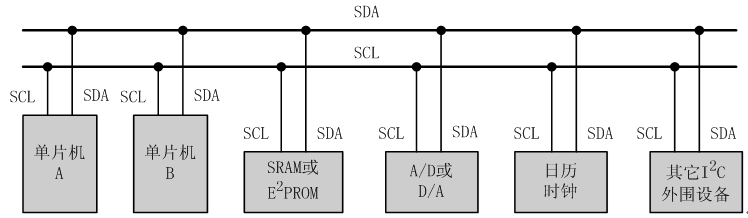
在多主机系统中,可能同时有几个主机想要主动传送数据,为了避免混乱,I2C总线通过总线仲裁,决定由哪一台主机控制总线。
80C51单片机应用系统中,通常是以80C51为主机,其它接口器件为从机的单主机情况。
I2C的模式
常用到的I2C总线以传输速率不同分为:
- 标准模式:100Kbit/s
- 低速模式:10Kbit/s
- 快速模式:400Kbit/s
- 高速模式:3.4Mbit/s
I2C的特征
I2C有如下特征:
- 串行通信:所有的数据以bit为单位在SDA线上串行传输;
- 同步通信:双方在用一个时钟下通信。同步通信的特征是通信线中有时钟信号CLK。
- 非差分:I2C速率不高,并且通信距离近,使用电平信号通信;
- 低速率:I2C通常是同一个板子上的两个IC芯片间通信,数量不大,速率低。
I2C的总线状态
I2C总线有两种状态:空闲态和忙态。
- 空闲态:没有设备发生通信,此时SDA和SCL均处于高电平状态;
- 忙态:其中一个从设备和主设备通信,I2C总线被占用,其它从设备处于等待状态;
I2C总线通过上拉电阻接正电源,这样可以保证当
总线空闲时,两根线均为高电平。连接到总线上的任一器件输出低电平,都将使总线信号变低,各器件的SDA和SCL是线与的关系。I2C数据传送
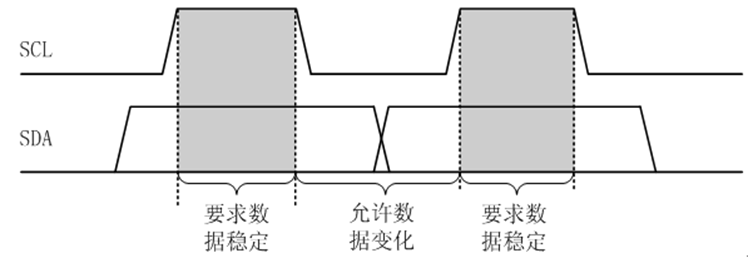
数据有效位规定
- 进行数据传送时,时钟线SCL为高电平期间,数据线SDA保持稳定;
- 只有时钟线SCL为低电平时,SDA上的高低电平才允许变化;
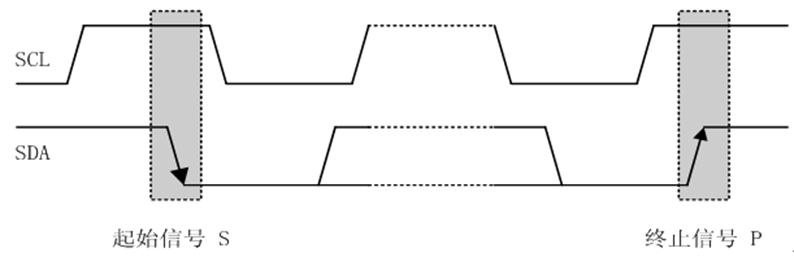
起始信号和终止信号
起始信号和终止信号(由主机发出):
- SCL为高电平期间,SDA由高电平变为低电平,表示起始信号;
- SCL为高电平期间,SDA由低电平向高电平变化,表示终止信号;
接收端将SCL拉低,可以使主机处于等待状态;接收端将SCL拉高,可以使主机工作。
起始信号产生后,总线就处于忙态(被占用);终止信号产生后,总线处于空闲态。
字节传送与应答
- 每个字节必须保证是8位,先传送最高位MSB,每一个被传送的字节后面都必须跟随一个应答位,即一帧有9位。
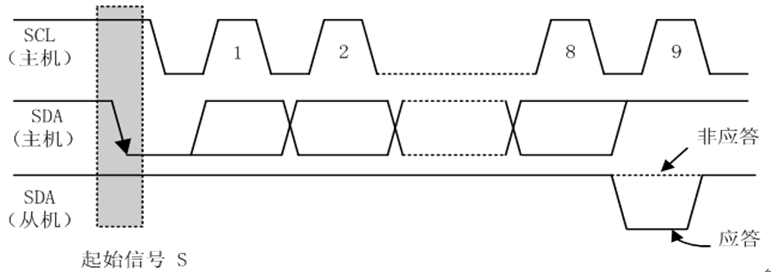
- 如果从机在做其他操作等原因不能对主机寻址信号应答时,从机必须将SDA置为高电平,由主机产生终止信号结束数据传送;
- 如果从机应答了主机,但数据传送一段时间后无法再接收更多数据,从机可以通过对无法接收的第一个数据字节的非应答通知主机,主机则应发出终止信号结束数据的继续传送;
- 当主机接收数据,收到最后一个数据字节后,必须向从机发送结束传送信号,这个信号由对从机的非应答来实现的。然后从机释放SDA线,允许主机产生终止信号;
数据帧格式
I2C总线上传送的数据信号既包括地址信号,又包括数据信号。
注:如下图中数据传送方向,阴影表示数据由主机向从机传送,无阴影部分表示数据由从机向主机发送,A表示应答(低电平), A ‾ \overline{A} A表示非应答(高电平),S表示起始信号,P表示终止信号。

起始信号后必须传送一个7位的从机地址+1位数据传送方向,0表示主机发送数据,1表示主机接收数据。
然后可以传送一个字节的数据,每字节数据后会收到1位应答信号,数据传送结束会收到非应答信号。
每次数据传送都是由主机产生终止信号结束。但是如果主机希望继续占用总线进行新的数据传送,可以不产生终止信号,马上再次发出起始信号对另一个从机寻址。
总线的一次数据传送中,可以有以下几种组合方式:
- 主机向从机发送数据,数据传送方向在整个传送过程中不变;

- 主机接收从机的数据,主机发送完从机的地址后,立即从从机中读数据;

- 传送过程中需要改变方向时,其实信号和从机地址都被重复产生一次,但两次读/写方向位相反;

总线寻址
I2C协议规定,采用7位的寻址字节,寻址字节的位定义:
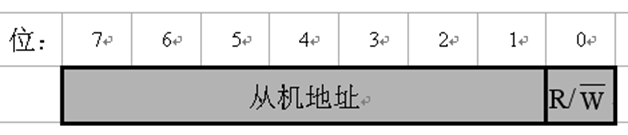
D7~D1是从机地址,D0表示数据传送方向,0表示主机向从机写数据,1表示主机由从机读数据。
从机的地址由固定部分和可编程部分组成。
总线信号模拟
主机可以采用不带I2C总线接口的单片机,使用软件实现I2C总线的数据传送,即软件和硬件结合的信号模拟。
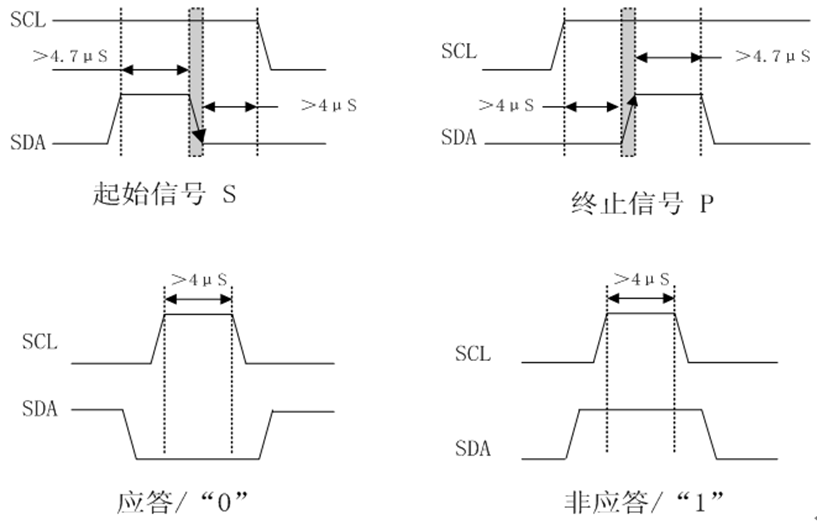
为保证数据传送的可靠性,标准的I2C总线的数据传送有严格的时序要求。如下。
-
起始信号需要SCL&SDA保持高电平>4.7us后,SDA由高电平到低电平>4us;
-
终止信号需要TSCL=H&SCL=L >4us,TSCL=H&SDA=L->H>4/7us;
-
应答信号需要TSCL=H&SDA=0>4us;
-
非应答信号需要TSCL=H&SDA=H > 4us;
数据写入
单片机
写操作时,首先发送该器件的7位地址码和1位写方向位0(共1个字节,8位),发送完后释放SDA线(拉高SDA),并在SCL线上产生第9个时钟信号,从器件产生应答信号作为确认是自己的地址,单片机收到应答后就可以传送数据了。传送数据时,单片机首先发送一个字节的被写入器件的存储区的首地址,收到应答后,主机逐个发送各数据字节,每发送一个字节都要等待应答。
当写入的数据传送完后,主机发出终止信号以结束写入操作.
写入n个字节的数据格式如下:

数据读出
单片机
读操作时,首先发送该器件的7位地址码和1位写方向位0(共1个字节,8位),发送完后释放SDA线(拉高SDA),并在SCL线上产生第9个时钟信号,从器件产生应答信号作为确认是自己的地址。然后再发送要读出器件的存储区的首地址,收到应答后,主机要重复一次起始信号并发出器件地址和读方向位,收到器件应答后就可以读出数据字节。
没读出一个字节,主机都要回复应答信号,当最后一个字节数据读完,主机返回非应答信号,并发出终止信号以结束读数据操作。

2. 模拟实现I2C读写数据
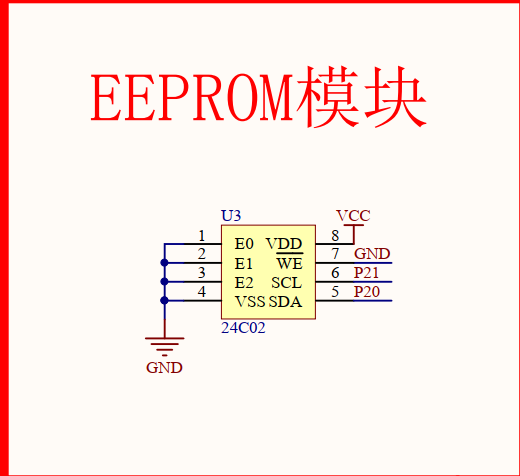
板子上的EEPROM是 AT24C02,其原理图如下:
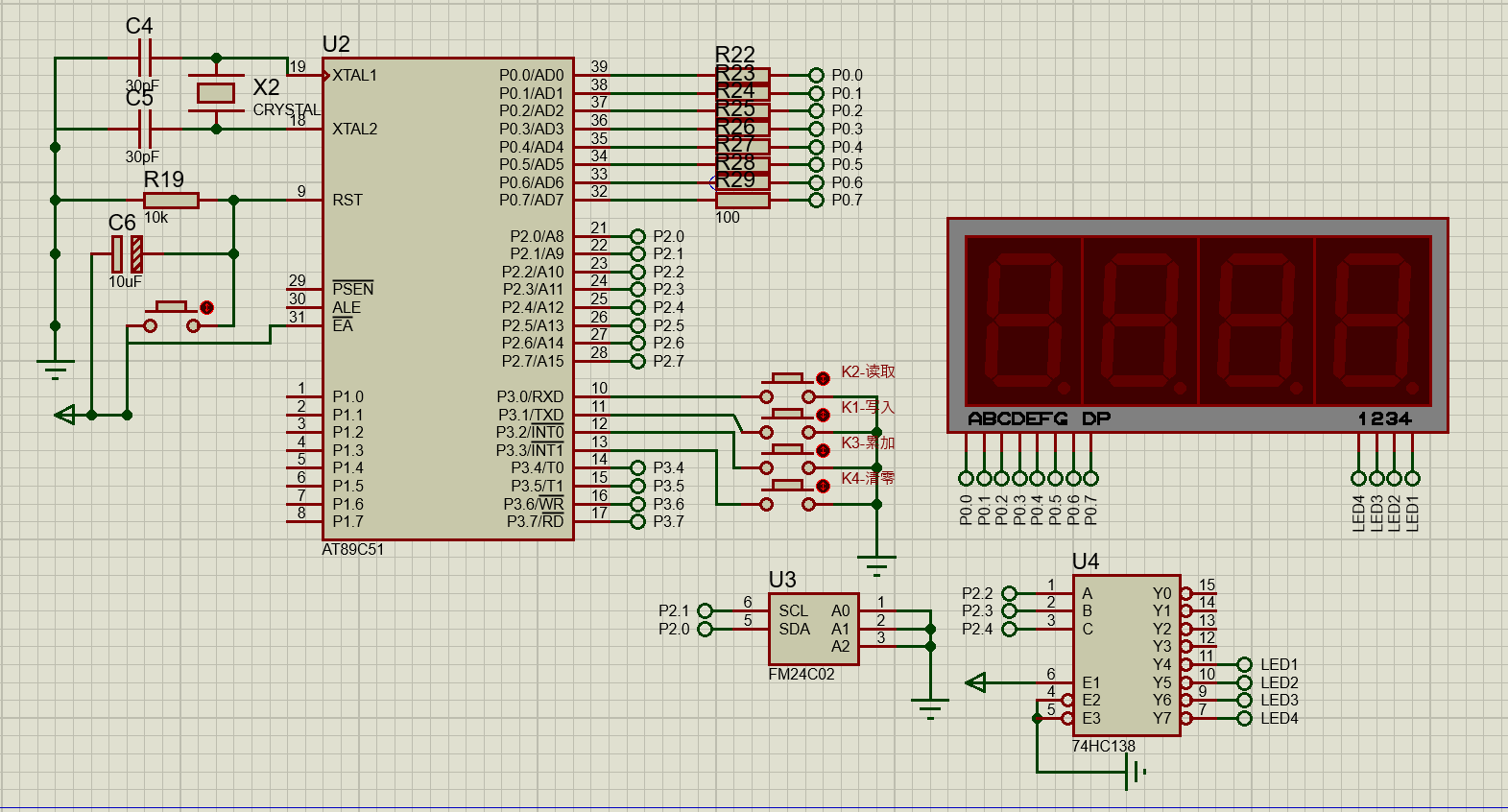
实现功能:
- 设置4个独立按键K1,K2,K3,K4,分别用于I2C写入、I2C读取、数据累加、数据清零;
- 设置一个LCD数码管显示器,用于显示读取的数据;
原理图如下:
main.c:#include "reg52.h" #include "i2c.h" typedef unsigned char u8; typedef unsigned int u16; sbit K1 = P3^1; // K1 保存显示的数据 sbit K2 = P3^0; // K2 读取保存的数据 sbit K3 = P3^2; // K3 累加读取的数据 sbit K4 = P3^3; // K4 清零 // 38 译码器 sbit LSA = P2^2; sbit LSB = P2^3; sbit LSC = P2^4; // 数码管段选数据 u8 code smgduan[] = {0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f}; // 显示0~9的值 char num=0,disp[4]; // 延时函数 void delay(u16 i) { while(i--); } // 按键处理函数 void Keypros() { if(K1==0) // 按键按下 { delay(1000); if(K1==0) // 按键按下 { AT24C02Write(1,num); // 写入数据 } while(!K1); // 独立按键是否松开 } if(K2==0) // 按键按下 { delay(1000); if(K2==0) // 按键按下 { num = (char)AT24C02Read(1); // 读取数据 } while(!K2); // 独立按键是否松开 } if(K3==0) // 按键按下 { delay(1000); if(K3==0) // 按键按下 { num++; // 累加 if(num > 255) num=0; } while(!K3); // 独立按键是否松开 } if(K4==0) // 按键按下 { delay(1000); if(K4==0) // 按键按下 { num=0; // 清零 } while(!K4); // 独立按键是否松开 } } void datapros() { // 4~0分别存储个、十、百、千位 disp[0] = smgduan[num/1000]; disp[1] = smgduan[num%1000/100]; disp[2] = smgduan[num%1000%100/10]; disp[3] = smgduan[num%1000%100%10]; } // 数码管显示 void DigDisplay() { u8 i = 0; for(i=0; i<4; i++){ switch(i){ case 0: LSA = 1;LSB = 1; LSC = 1; break; //显示第0位 case 1: LSA = 0;LSB = 1; LSC = 1; break; //显示第1位 case 2: LSA = 1;LSB = 0; LSC = 1; break; //显示第2位 case 3: LSA = 0;LSB = 0; LSC = 1; break; //显示第3位 } P0 = disp[i]; // 发送段码 delay(100); // 间隔一段时间扫描 P0 = 0x00; //消隐 } } void main() { while(1) { Keypros(); datapros(); DigDisplay(); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
i2c.h:#ifndef _I2C_H #define _I2C_H #include// 定义时钟线和数据线 sbit SCL = P2^1; sbit SDA = P2^0; void I2CStart(); void I2CStop(); unsigned char I2CWriteByte(unsigned char dat); unsigned char I2CReadByte(); void AT24C02Write(unsigned char addr,unsigned char dat); unsigned char AT24C02Read(unsigned char addr); #endif - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
i2c.c:#include "i2c.h" // 单片机管脚模拟时许 // 延时10us void Delay10us(void) { unsigned char a,b; for(b=1;b>0;b--) for(a=2;a>0;a--); } // 模拟起始信号 void I2CStart() { // SCL=H,SCL=H->L,delay4.7us SDA = 1; Delay10us(); SCL=1; // SDA/SCL = H Delay10us(); SDA=0; // SDA H->L Delay10us(); SCL=0; // SCL=L时,数据可以改变 Delay10us(); } // 模拟终止信号 void I2CStop() { // SCL=H,SCL=L->H,delay4.7us SDA = 0; Delay10us(); SCL=1; Delay10us(); SDA=1; // SDA L->H Delay10us(); } // 模拟发送数据 unsigned char I2CWriteByte(unsigned char dat) { unsigned char a=0, b=0; for(a=0;a<8;a++) { SDA = (dat>>7); // 传送最高位 dat = (dat<<1); // 替换最高位 Delay10us(); SCL = 1; // SCL=H, 数据保持稳定 Delay10us(); SCL = 0; // SCL=L, 数据可以改变 Delay10us(); } SDA=1; // 释放时钟线和数据线 Delay10us(); SCL=1; // Delay10us(); while(SDA) // 应答信号SDA=0 ,非应答SDA=1 { b++; if(b>200) // 非应答超过200次,至少200us { SCL=0; // 拉低时钟线 Delay10us(); return 0; // 表示发送信号失败 } } SCL=0; Delay10us(); return 1; } // 模拟接收数据 unsigned char I2CReadByte() { unsigned char a=0, dat=0; SDA=1; // SDA=1拉高使其处于空闲状态 Delay10us(); for(a=0;a<8;a++) { SCL=1; // 保持数据稳定 Delay10us(); dat <<= 1; // data=0 <<1 -> 0 dat |= SDA; Delay10us(); SCL=0; // SDA数据可以改变 Delay10us(); } return dat; } // AT24C02 EEPROM 读写函数 void AT24C02Write(unsigned char addr, unsigned char dat) { // 1. 起始信号 I2CStart(); // 2. 器件地址 I2CWriteByte(0xa0); // 3. 写入的首地址 I2CWriteByte(addr); // 4. 写入数据 I2CWriteByte(dat); // 5. 停止信号 I2CStop(); } unsigned char AT24C02Read(unsigned char addr) { unsigned char dat=0; // 1. 起始信号 I2CStart(); // 2. 器件地址 I2CWriteByte(0xa0); // 3. 写入的首地址 I2CWriteByte(addr); // 再次发送器件地址时,需要重新发送起始信号 // 4. 起始信号 I2CStart(); // 5. 器件地址 I2CWriteByte(0xa1); // 6. 读取数据 dat = I2CReadByte(); // 5. 停止信号 I2CStop(); return dat; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
结果:初始读取为7是因为之前有进行过I2C写入,默认没有对I2C操作前读取到的数据是0。
出现的问题:
- 刚开始定义数据时使用data,编译报错
I2C.H(13): error C141: syntax error near ')';原因是不能声明变量名为data,data是C51中的关键字。C51中的关键字data,idata,xdata,pdata,bdata。 - proteus绘制总线使用方法:proteus中的标签及总线的使用方法。
- 独立按键:51单片机 4个独立按键控制LED灯 (protues仿真)(C语言版)。
-
相关阅读:
UOS Deepin Linux 安装 anaconda
从阿里云OSS迁移到AWS S3的步骤
Spring Boot:利用JPA进行数据库的增改
在Maya中想要使用Arnold渲染出高质量作品,这些技巧很重要
什么是SLA、SLO和SLI
这是我见过史上最强的spring全家桶笔记,在GitHub上两天破百万瞬间爆火
国民技术Cortex-M0系列单片机IAP升级
加固平板电脑在无人机的应用|亿道三防onerugged
Himall商城- web私有方法
【微服务】 微服务学习笔记二:Eureka注册中心的介绍及搭建
- 原文地址:https://blog.csdn.net/sinat_41752325/article/details/127710996
