-
FPGA HLS 卷积单元 数据类型&hls优化&约束设置
数据类型
自定义精度整形:
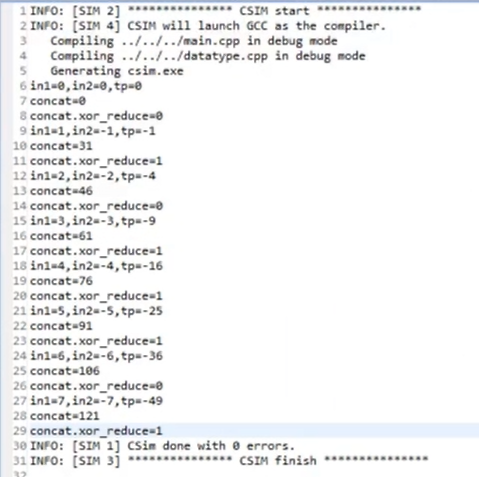
ap_int<4> in1, in2; ap_int<8> concat; concat = (in1, in2); // in1和in2拼起来(按照补码拼起来) /* 例子: in1 = 1, in2 = -1 补码: in1 = 0001 in2 = 1001 ==> 1110+1 ==> 1111 concat = 00011111 = 31 */ concat.xor_reduce(); // 按位异或- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
自定义定点数
为了替换float,double类型的数,加快运算,节约资源
ap_fixed<11, 6> Var1 = 22.96875; // 一共11个bit,其中6个bit表示整数,5个bit表示小数;剩一个bit表示正负数 ap_ufixed<12, 11> Var2 = 512.5; // 一共12个bit,11位表示整数,最后一位表示小数- 1
- 2

卷积的量化或定点化
根据输入的数据,找到卷积层的数据范围
A= aaaaaaaaaaaaaaaa, fix_point=12 B= bbbbbbbbbbbbbbbb, fix_point=13 C= ????????????????, fix_point=13 ????????????????*(2^13)=A*B/2^(12+13) 求C的编码:???????????????? = A*B/2^(12+13-13) = A*B/2^(fix_pointA + fix_pointB – fix_pointC) 例子: A:0010.1100 = 44/16 = 2+0.5+0.25 = 2.75 fix_point = 4 B:00101.100 = 44/8 = 5+0.5 = 5.5 fix_point = 3 C:????.???? Fix_point = 4 A*B =44*44 = 011110010000 == 右移(3+4) = 01111.0010000 = 15.125 一共有(3+4)位小数,但是C的精度是4,所以需要把多余的小数移出去 移出去的位数就是(3+4-4) = 3 所以C = 1111.0010 fix_point = 4- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
自定义卷积
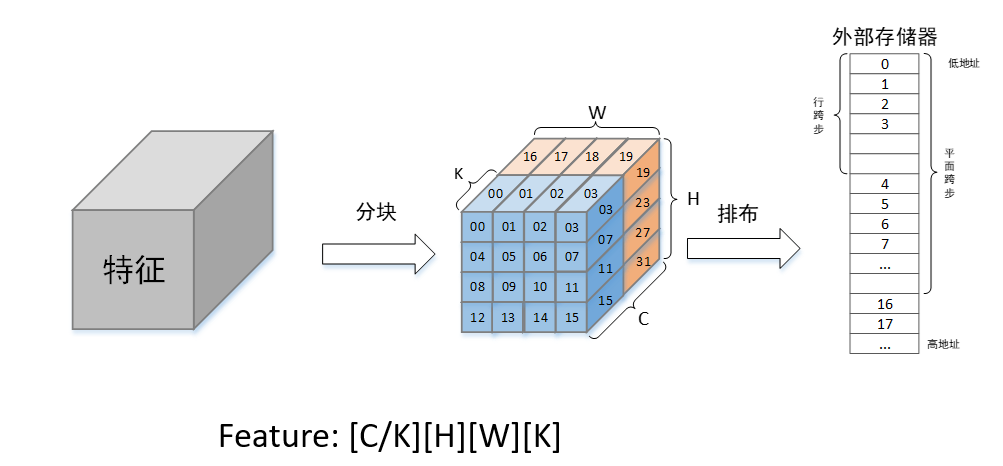
特征的内存排布方式
权重的内存排布方式
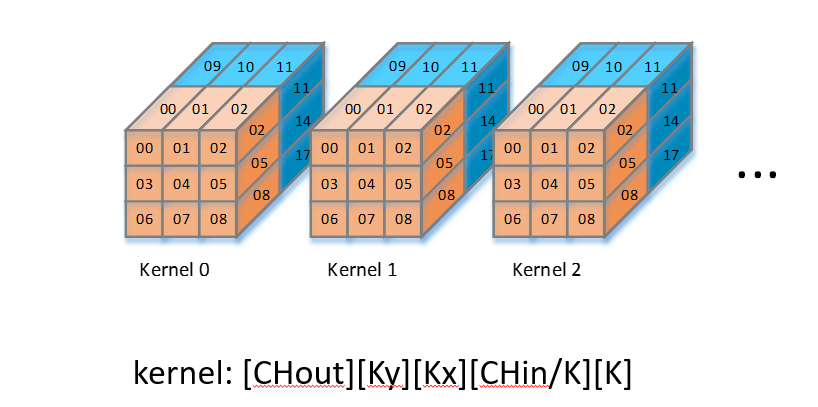
卷积的大小不固定,需要根据在内存中的排布方式算出地址
新建conv_core项目
conv_core.h
#ifndef __CONV_CORE_H__ #define __CONV_CORE_H__ #include#include using namespace std; #define K 8 typedef ap_int<16> data_type; // 单个数据的大小 typedef ap_int<16*K> tile_type; // 分块数据的大小 typedef ap_int<32> mul_type; // 两个数据相乘的数据大小:16*16==>32 typedef ap_int<32*K> mul_tile_type; // 分块数据相乘的大小 typedef ap_int<40> acc_type; // 一次卷积内的数据相加后的大小,按照经验推断 // 卷积的定义 void conv_core( ap_uint<16> in_channel, // 输入特征的通道数 ap_uint<16> in_height, // 输入特征高度 ap_uint<16> in_width, // 输入特征宽度 ap_uint<16> out_channel, // 输出特征通道数 // 卷积核参数 ap_uint<8> kernel_width, // 卷积核宽度 ap_uint<8> kernel_height, // 卷积核高度 ap_uint<8> stride_x, // 宽度方向步长 ap_uint<8> stride_y, // 高度方向步长 ap_uint<1> padding_mode, // 卷积的模式; 0: valid(没有padding填充), 1:same(输入输出的图大小不变) ap_uint<1> relu_en, // 激活函数 tile_type input_feature[], ap_uint<4> input_feature_precision, // 输入特征图地址和精度(小数点位置) tile_type weight[], ap_uint<4> weight_precision,// 权重地址和精度(小数点位置) tile_type output_feature[], ap_uint<4> out_feature_precision// 输出特征图地址和精度(小数点位置) ); #endif - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
conv_core.cpp
#include "conv_core.h" void conv_core( // 特征图参数 ap_uint<16> in_channel, // 输入特征的通道数 ap_uint<16> in_height, // 输入特征高度 ap_uint<16> in_width, // 输入特征宽度 ap_uint<16> out_channel, // 输出特征通道数 // 卷积核参数 ap_uint<8> kernel_width, // 卷积核宽度 ap_uint<8> kernel_height, // 卷积核高度 ap_uint<8> stride_x, // 宽度方向步长 ap_uint<8> stride_y, // 高度方向步长 ap_uint<1> padding_mode, // 卷积的模式; 0: valid(没有padding填充), 1:same(输入输出的图大小不变) ap_uint<1> relu_en, // 激活函数 tile_type input_feature[], ap_uint<4> input_feature_precision, // 输入特征图地址和精度(小数点位置) tile_type weight[], ap_uint<4> weight_precision,// 权重地址和精度(小数点位置) tile_type output_feature[], ap_uint<4> out_feature_precision// 输出特征图地址和精度(小数点位置) ) { // Feature: [CHin/K][H][W][K] // Weight: [CHout][CHin/K][KH][KW][K] // 根据卷积模式,计算padding ap_uint<8> padding_x, padding_y; if(padding_mode == 0){ padding_x = padding_y = 0; }else{ padding_x = (kernel_width-1)/2; padding_y = (kernel_height-1)/2; } // 计算分块个数 ap_uint<16> div_tile_num = (in_channel + K-1) / K; // 计算输出截断精度 ap_uint<5> out_truncate = input_feature_precision + weight_precision - out_feature_precision; /* * [x x x] x x x * x x [x x x] x */ // 计算输出宽度和高度 ap_uint<16> out_width = (in_width + padding_x*2) / stride_x + 1; ap_uint<16> out_height = (in_height + padding_y*2) / stride_y + 1; // 选择输出特征的第y行,第x列,第c_out个输出通道的数据 // 选择第c_out个权重的第y行,第x列,第tile_index个分块 LOOP_out_channel: for(int out_index = 0; out_index < out_channel; ++ out_index){ LOOP_out_height: for(int i = 0; i < out_height; ++ i){ LOOP_out_width: for(int j = 0; j < out_width; ++ j){ // 相乘结果累加 acc_type sum=0; // 计算输出特征中一个tile的数据 ap_int<16> out_tile = 0; LOOP_kernel_height: for(int kh = 0; kh < kernel_height; ++ kh){ LOOP_kernel_width: for(int kw = 0; kw < kernel_width; ++ kw){ LOOP_div_tile_num: for(int tile_index = 0; tile_index < div_tile_num; ++ tile_index){ // 获取计算点 ap_uint<16> in_h = i*stride_y-padding_y + kh; ap_uint<16> in_w = j*stride_x-padding_x + kw; // 获取输入特征和权重的一个块数据 tile_type data_tile, weight_tile; // 有padding会越界 if(in_h >= 0 && in_h < in_height && in_w >= 0 && in_w < in_width){ data_tile = input_feature[in_width*in_height*tile_index + in_width*in_h + in_w]; weight_tile = weight[kernel_width*kernel_height*div_tile_num*out_index + kernel_width*kernel_height*tile_index + kernel_width*kh+kw]; }else{ data_tile = 0; weight_tile = 0; } // 块数据相乘 mul_tile_type mul_tile_data; for(int k = 0; k < K; ++ k) mul_tile_data.range(k*32+31, k*32) = (data_type)data_tile.range(k*16+15, k*16)* (data_type)weight_tile.range(k*16+15, k*16); // 相乘结果累加 for(int k = 0; k < K; ++ k) sum += (mul_tile_type)mul_tile_data.range(k*32+31, k*32); } } } // 激活函数 if(relu_en & sum < 0) sum = 0; // 截断多余精度 acc_type res = sum >> out_truncate; if (res > 32767) res = 32767; else if (res < -32768) res = -32768; out_tile.range((out_index % K) * 16 + 15, (out_index % K) * 16) = res; // 存tile里的一个数据 // 一个tile都存完了或者存到最后一个通道凑不够一个tile if((out_index%K) == K - 1 || out_index == (out_channel - 1)) output_feature[(out_index/K)*out_width*out_height + out_width*i+j] = out_tile; } } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
main.cpp
#include "stdio.h" #include "conv_core.h" #define IN_WIDTH 10 #define IN_HEIGHT 10 #define IN_CHANNEL 1 #define IN_DIV_TILE_NUM ((IN_CHANNEL+K-1)/K) #define KERNEL_WIDTH 5 #define KERNEL_HEIGHT 5 #define STRIDE_X 1 #define STRIDE_Y 1 #define RELU_EN 0 #define PADDING_MODE 0 // 0:valid 1:same #define PADDING_X (PADDING_MODE?(KERNEL_WIDTH-1)/2:0) #define PADDING_Y (PADDING_MODE?(KERNEL_HEIGHT-1)/2:0) #define OUT_CHANNEL 1 #define OUT_WIDTH ((IN_WIDTH+PADDING_X*2-KERNEL_WIDTH)/STRIDE_X+1) #define OUT_HEIGHT ((IN_HEIGHT+PADDING_Y*2-KERNEL_HEIGHT)/STRIDE_Y+1) #define OUT_DIV_TILE_NUM ((OUT_CHANNEL+K-1)/K) int main(void) { tile_type input_feature[IN_DIV_TILE_NUM][IN_HEIGHT][IN_WIDTH]; tile_type weight[OUT_CHANNEL][IN_DIV_TILE_NUM][KERNEL_HEIGHT][KERNEL_WIDTH]; tile_type output_feature[OUT_DIV_TILE_NUM][OUT_HEIGHT][OUT_WIDTH]; for(int tile_index = 0; tile_index < IN_DIV_TILE_NUM; ++ tile_index){ for(int i = 0; i < IN_HEIGHT; ++ i){ for(int j = 0; j < IN_WIDTH; ++ j){ for(int k = 0; k < K; ++ k){ // 可能除不尽 if(tile_index*K+k < IN_CHANNEL) input_feature[tile_index][i][j].range(k*16+15, k*16) = (1<<14); else input_feature[tile_index][i][j].range(k*16+15, k*16) = 0; } } } } for(int out_index = 0; out_index < OUT_CHANNEL; ++ out_index){ for(int tile_index = 0; tile_index < OUT_DIV_TILE_NUM; ++ tile_index){ for(int i = 0; i < OUT_HEIGHT; ++ i){ for(int j = 0; j < OUT_WIDTH; ++j){ for(int k = 0; k < K; ++ k){ // 输入特征赋值为0,特征值就不用考虑除不尽的问题 weight[out_index][tile_index][i][j].range(16*k+15, 16*k) = (1<<14); } } } } } for(int tile_index = 0; tile_index < OUT_DIV_TILE_NUM; ++ tile_index){ for(int i = 0; i < OUT_HEIGHT; ++ i){ for(int j = 0; j < OUT_WIDTH; ++ j){ output_feature[tile_index][i][j] = 0; } } } printf("initial down\n"); conv_core(IN_CHANNEL, IN_HEIGHT, IN_WIDTH, OUT_CHANNEL, KERNEL_WIDTH, KERNEL_HEIGHT, STRIDE_X, STRIDE_Y, PADDING_MODE, RELU_EN, &input_feature[0][0][0], 14, &weight[0][0][0][0], 14, &output_feature[0][0][0], 10 ); for(int tile_index = 0; tile_index < OUT_DIV_TILE_NUM; ++ tile_index){ for(int i = 0; i < OUT_HEIGHT; ++ i){ for(int j = 0; j < OUT_WIDTH; ++ j){ cout << "out[" << tile_index <<"]["<<i<<"]["<<j<<"]="<< (data_type)output_feature[tile_index][i][j].range(15, 0) << "\t"; } cout << endl; } } return 0; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
运行
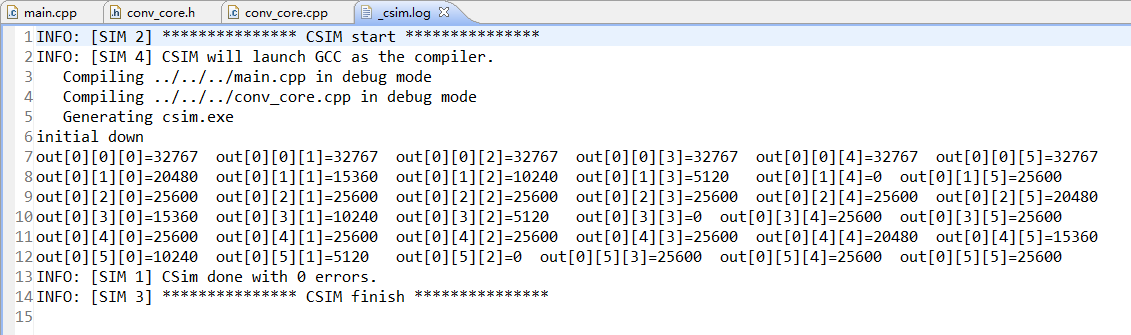
C仿真结果:
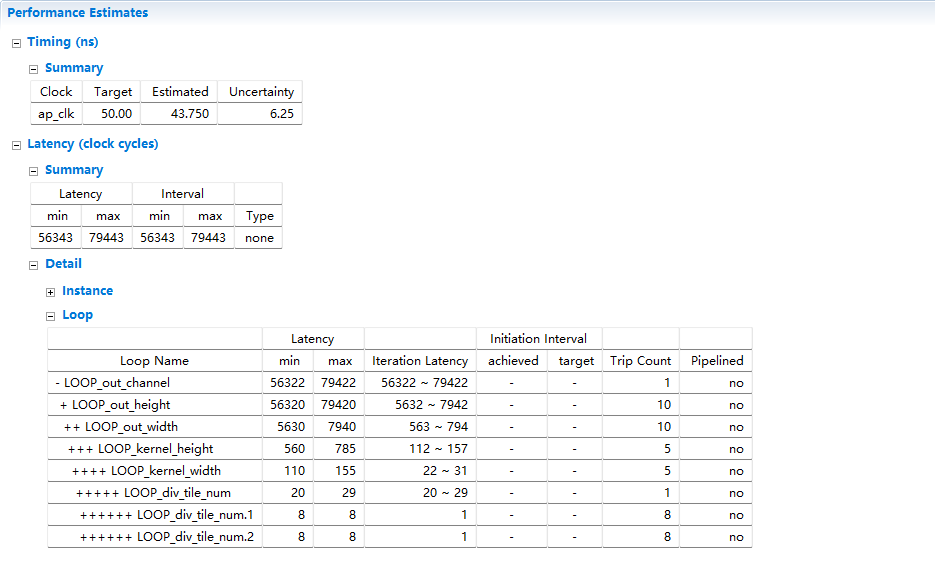
C综合:
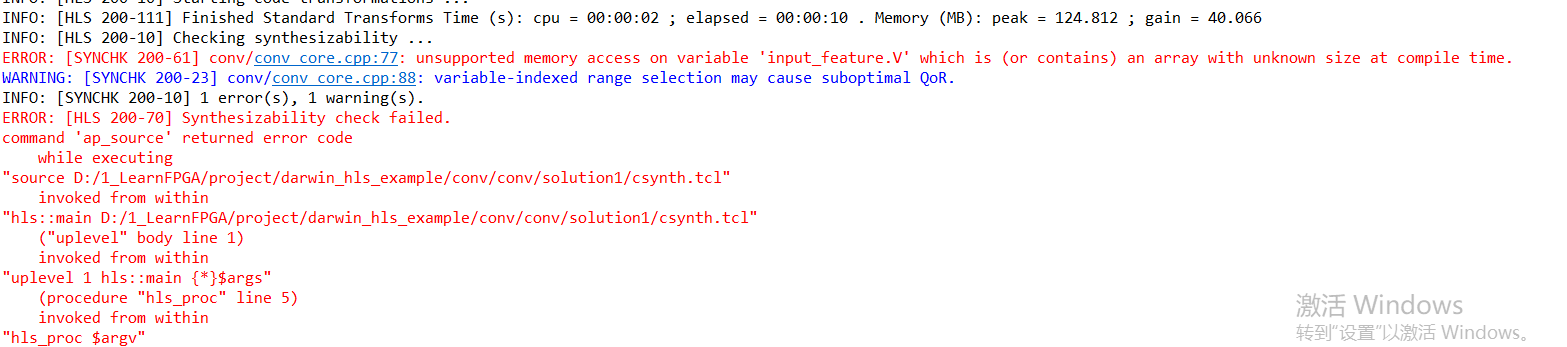
出错了,需要加约束。报错信息:输入特征feature_in是没有固定长度的
但是我们只是把input_feature当作基地址,而不是数组,所以需要告诉工具,数据来自外部存储器
数据接口约束

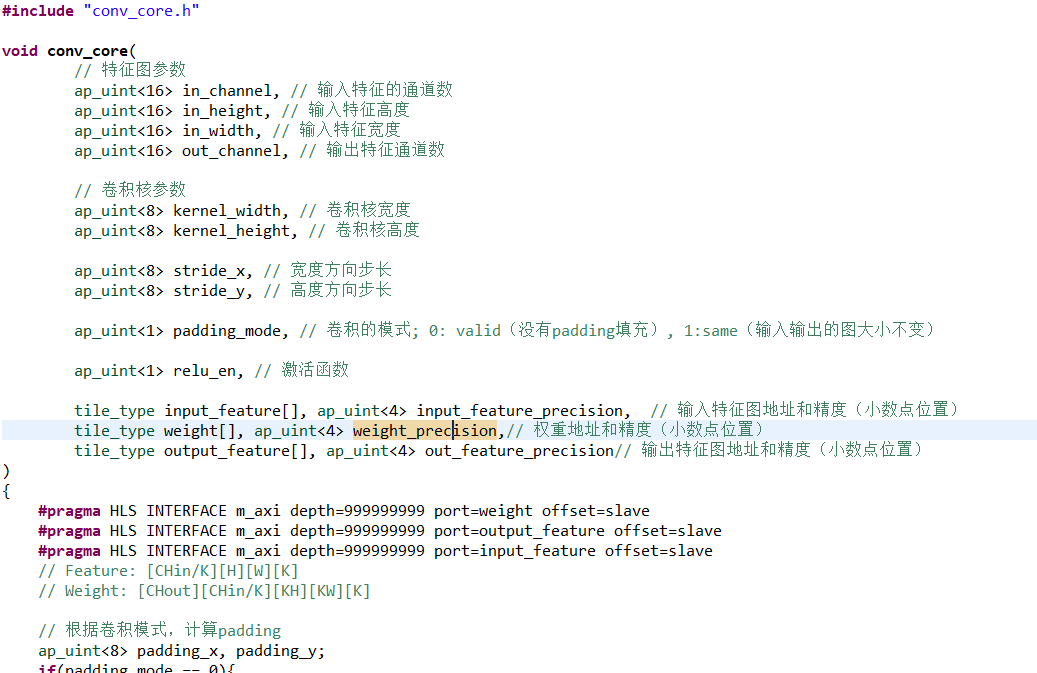
#pragma HLS INTERFACE m_axi depth=999999999 port=weight offset=slave #pragma HLS INTERFACE m_axi depth=999999999 port=output_feature offset=slave #pragma HLS INTERFACE m_axi depth=999999999 port=input_feature offset=slave- 1
- 2
- 3
再次C综合:
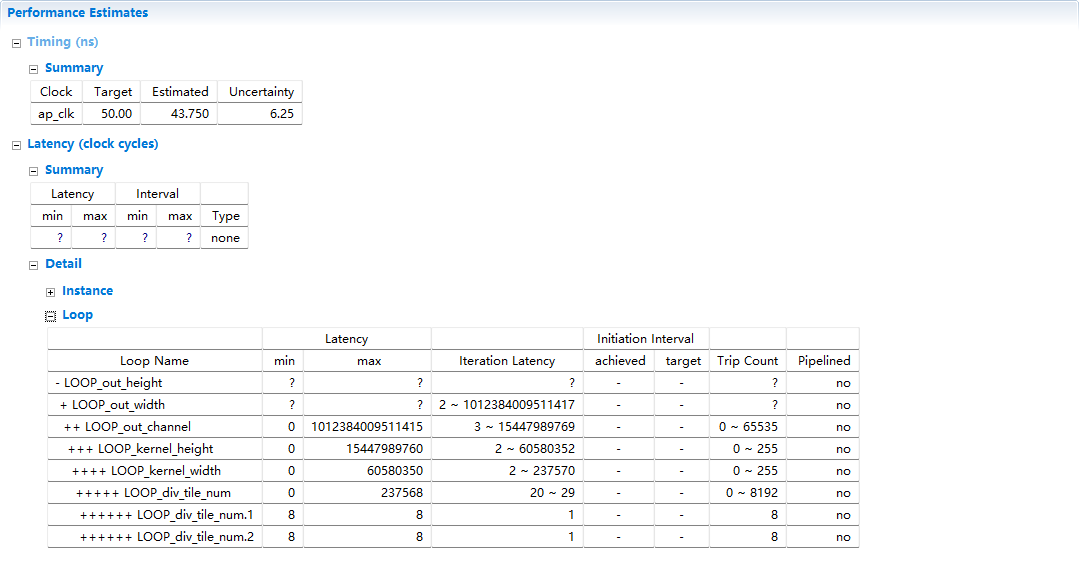
???是因为,循环次数是一个变量,工具无法估计性能
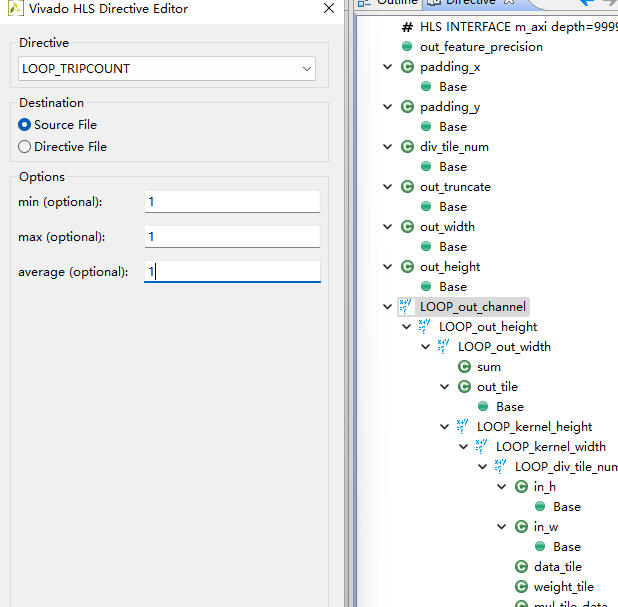
循环次数约束
那就根据test bench里的例子进行测试约束
#include "conv_core.h" void conv_core( // 特征图参数 ap_uint<16> in_channel, // 输入特征的通道数 ap_uint<16> in_height, // 输入特征高度 ap_uint<16> in_width, // 输入特征宽度 ap_uint<16> out_channel, // 输出特征通道数 // 卷积核参数 ap_uint<8> kernel_width, // 卷积核宽度 ap_uint<8> kernel_height, // 卷积核高度 ap_uint<8> stride_x, // 宽度方向步长 ap_uint<8> stride_y, // 高度方向步长 ap_uint<1> padding_mode, // 卷积的模式; 0: valid(没有padding填充), 1:same(输入输出的图大小不变) ap_uint<1> relu_en, // 激活函数 tile_type input_feature[], ap_uint<4> input_feature_precision, // 输入特征图地址和精度(小数点位置) tile_type weight[], ap_uint<4> weight_precision,// 权重地址和精度(小数点位置) tile_type output_feature[], ap_uint<4> out_feature_precision// 输出特征图地址和精度(小数点位置) ) { #pragma HLS INTERFACE m_axi depth=999999999 port=weight offset=slave #pragma HLS INTERFACE m_axi depth=999999999 port=output_feature offset=slave #pragma HLS INTERFACE m_axi depth=999999999 port=input_feature offset=slave // Feature: [CHin/K][H][W][K] // Weight: [CHout][CHin/K][KH][KW][K] // 根据卷积模式,计算padding ap_uint<8> padding_x, padding_y; if(padding_mode == 0){ padding_x = padding_y = 0; }else{ padding_x = (kernel_width-1)/2; padding_y = (kernel_height-1)/2; } // 计算分块个数 ap_uint<16> div_tile_num = (in_channel + K-1) / K; // 计算输出截断精度 ap_uint<5> out_truncate = input_feature_precision + weight_precision - out_feature_precision; /* * [x x x] x x x * x x [x x x] x */ // 计算输出宽度和高度 ap_uint<16> out_width = (in_width + padding_x*2) / stride_x + 1; ap_uint<16> out_height = (in_height + padding_y*2) / stride_y + 1; // 选择输出特征的第y行,第x列,第c_out个输出通道的数据 // 选择第c_out个权重的第y行,第x列,第tile_index个分块 LOOP_out_channel: for(int out_index = 0; out_index < out_channel; ++ out_index){ #pragma HLS LOOP_TRIPCOUNT min=1 max=1 avg=1 LOOP_out_height: for(int i = 0; i < out_height; ++ i){ #pragma HLS LOOP_TRIPCOUNT min=10 max=10 avg=10 LOOP_out_width: for(int j = 0; j < out_width; ++ j){ #pragma HLS LOOP_TRIPCOUNT min=10 max=10 avg=10 // 相乘结果累加 acc_type sum=0; // 计算输出特征中一个tile的数据 ap_int<16> out_tile = 0; LOOP_kernel_height: for(int kh = 0; kh < kernel_height; ++ kh){ #pragma HLS LOOP_TRIPCOUNT min=5 max=5 avg=5 LOOP_kernel_width: for(int kw = 0; kw < kernel_width; ++ kw){ #pragma HLS LOOP_TRIPCOUNT min=5 max=5 avg=5 LOOP_div_tile_num: for(int tile_index = 0; tile_index < div_tile_num; ++ tile_index){ #pragma HLS LOOP_TRIPCOUNT min=1 max=1 avg=1 // 获取计算点 ap_uint<16> in_h = i*stride_y-padding_y + kh; ap_uint<16> in_w = j*stride_x-padding_x + kw; // 获取输入特征和权重的一个块数据 tile_type data_tile, weight_tile; // 有padding会越界 if(in_h >= 0 && in_h < in_height && in_w >= 0 && in_w < in_width){ data_tile = input_feature[in_width*in_height*tile_index + in_width*in_h + in_w]; weight_tile = weight[kernel_width*kernel_height*div_tile_num*out_index + kernel_width*kernel_height*tile_index + kernel_width*kh+kw]; }else{ data_tile = 0; weight_tile = 0; } // 块数据相乘 mul_tile_type mul_tile_data; for(int k = 0; k < K; ++ k) mul_tile_data.range(k*32+31, k*32) = (data_type)data_tile.range(k*16+15, k*16)* (data_type)weight_tile.range(k*16+15, k*16); // 相乘结果累加 for(int k = 0; k < K; ++ k) sum += (mul_tile_type)mul_tile_data.range(k*32+31, k*32); } } } // 激活函数 if(relu_en & sum < 0) sum = 0; // 截断多余精度 acc_type res = sum >> out_truncate; if (res > 32767) res = 32767; else if (res < -32768) res = -32768; out_tile.range((out_index % K) * 16 + 15, (out_index % K) * 16) = res; // 存tile里的一个数据 // 一个tile都存完了或者存到最后一个通道凑不够一个tile if((out_index%K) == K - 1 || out_index == (out_channel - 1)) output_feature[(out_index/K)*out_width*out_height + out_width*i+j] = out_tile; } } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
综合结果:
优化
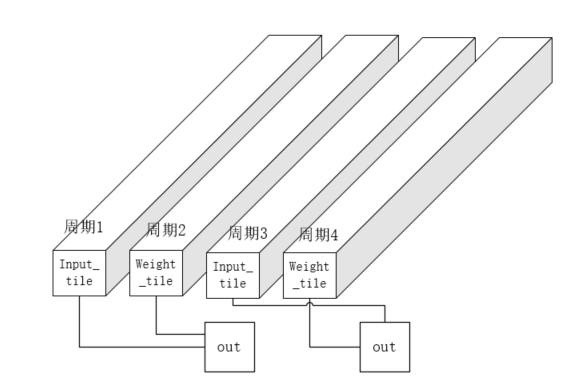
最内层的块相乘只用两个周期完成
一个周期用来去input_tile,另一个取weight_tile,输出计算结果的同时,也在取数据
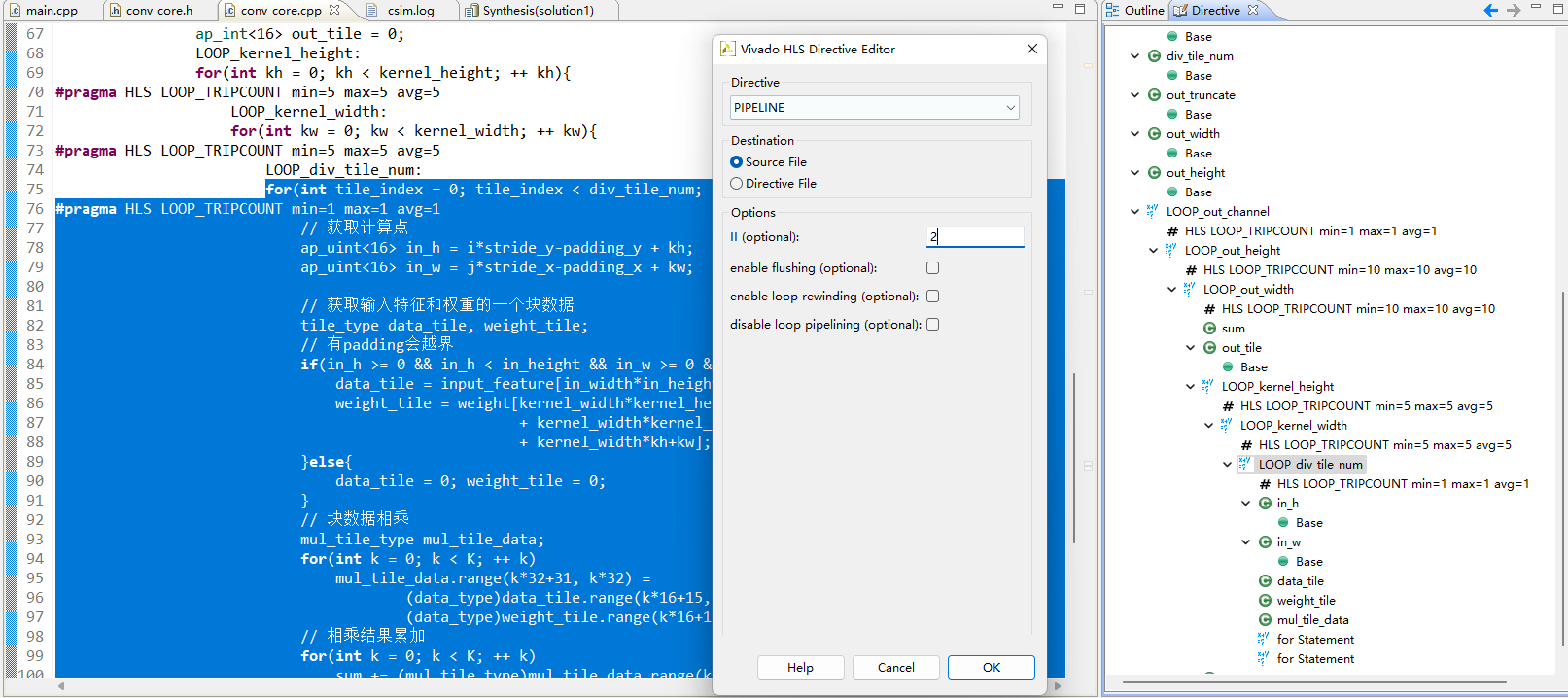
添加 pipeline 优化
迭代间隔 II = 2
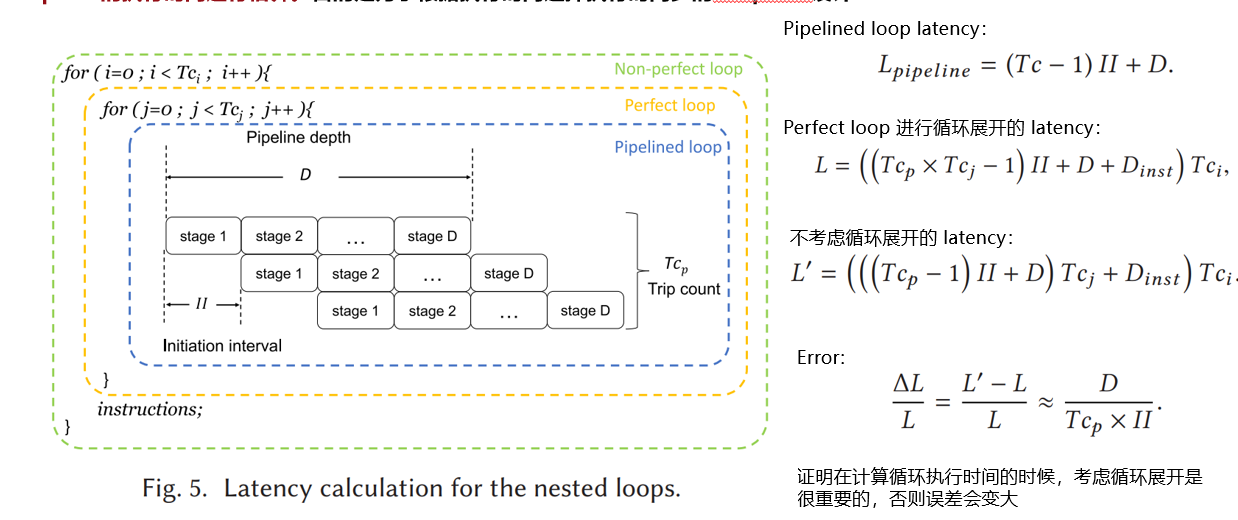
如果效果理想的话应该是
1*10*10*5*5*2=5000但是综合结果并不是:
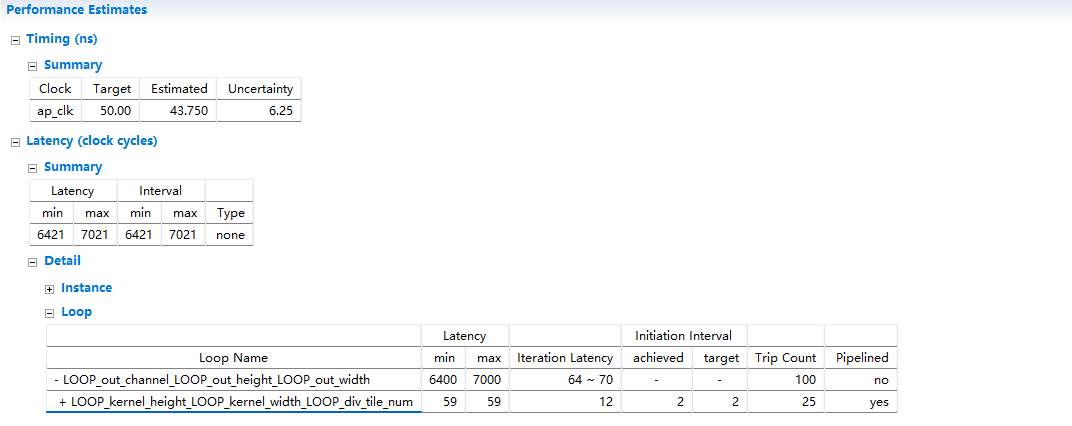
卷积一次:
2*25 = 50这里循环的latency是59,多了9个周期是迭代latency
但是顶层的迭代latency达到了70,其中多的11周期的计算在这里:
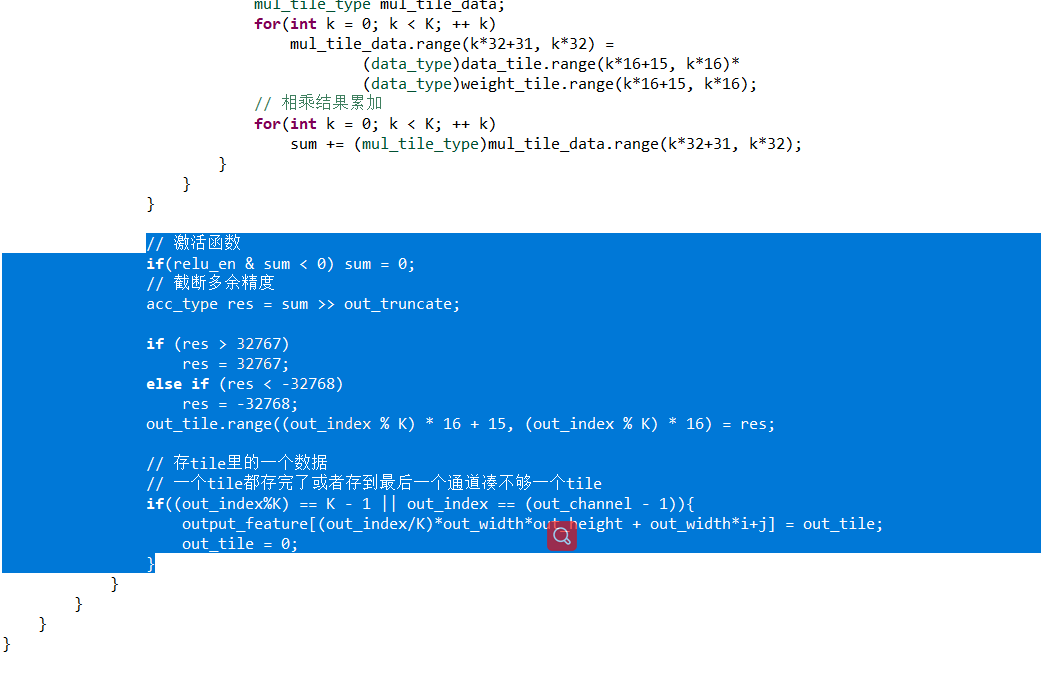
完美循环优化与计算顺序的调换
- 完美循环
使用if语句使循环之间没有代码,使得循环可以合并
从存储器取块数据相乘累加的运算,其实可以和计算结果的存储并行
- 计算顺序调换
将out_channel挪到kernel_width上面,这样每计算完一次卷积tile,就判断一次对输出特征写计算结果
#include "conv_core.h" void conv_core( // 特征图参数 ap_uint<16> in_channel, // 输入特征的通道数 ap_uint<16> in_height, // 输入特征高度 ap_uint<16> in_width, // 输入特征宽度 ap_uint<16> out_channel, // 输出特征通道数 // 卷积核参数 ap_uint<8> kernel_width, // 卷积核宽度 ap_uint<8> kernel_height, // 卷积核高度 ap_uint<8> stride_x, // 宽度方向步长 ap_uint<8> stride_y, // 高度方向步长 ap_uint<1> padding_mode, // 卷积的模式; 0: valid(没有padding填充), 1:same(输入输出的图大小不变) ap_uint<1> relu_en, // 激活函数 tile_type input_feature[], ap_uint<4> input_feature_precision, // 输入特征图地址和精度(小数点位置) tile_type weight[], ap_uint<4> weight_precision,// 权重地址和精度(小数点位置) tile_type output_feature[], ap_uint<4> out_feature_precision// 输出特征图地址和精度(小数点位置) ) { #pragma HLS INTERFACE m_axi depth=999999999 port=weight offset=slave #pragma HLS INTERFACE m_axi depth=999999999 port=output_feature offset=slave #pragma HLS INTERFACE m_axi depth=999999999 port=input_feature offset=slave // Feature: [CHin/K][H][W][K] // Weight: [CHout][CHin/K][KH][KW][K] // 根据卷积模式,计算padding ap_uint<8> padding_x, padding_y; if(padding_mode == 0){ padding_x = padding_y = 0; }else{ padding_x = (kernel_width-1)/2; padding_y = (kernel_height-1)/2; } // 计算分块个数 ap_uint<16> div_tile_num = (in_channel + K-1) / K; // 计算输出截断精度 ap_uint<5> out_truncate = input_feature_precision + weight_precision - out_feature_precision; /* * [x x x] x x x * x x [x x x] x */ // 计算输出宽度和高度 ap_uint<16> out_width = (in_width + padding_x*2) / stride_x + 1; ap_uint<16> out_height = (in_height + padding_y*2) / stride_y + 1; // 计算输出特征中一个tile的数据 ap_int<16> out_tile = 0; // 相乘结果累加 acc_type sum=0; // 选择输出特征的第y行,第x列,第c_out个输出通道的数据 // 选择第c_out个权重的第y行,第x列,第tile_index个分块 LOOP_out_height: for(int i = 0; i < out_height; ++ i){ #pragma HLS LOOP_TRIPCOUNT min=1 max=1 avg=1 LOOP_out_width: for(int j = 0; j < out_width; ++ j){ #pragma HLS LOOP_TRIPCOUNT min=10 max=10 avg=10 LOOP_out_channel: for(int out_index = 0; out_index < out_channel; ++ out_index){ #pragma HLS LOOP_TRIPCOUNT min=10 max=10 avg=10 LOOP_kernel_height: for(int kh = 0; kh < kernel_height; ++ kh){ #pragma HLS LOOP_TRIPCOUNT min=5 max=5 avg=5 LOOP_kernel_width: for(int kw = 0; kw < kernel_width; ++ kw){ #pragma HLS LOOP_TRIPCOUNT min=5 max=5 avg=5 LOOP_div_tile_num: for(int tile_index = 0; tile_index < div_tile_num; ++ tile_index){ #pragma HLS PIPELINE II=2 #pragma HLS LOOP_TRIPCOUNT min=1 max=1 avg=1 // 获取计算点 ap_uint<16> in_h = i*stride_y-padding_y + kh; ap_uint<16> in_w = j*stride_x-padding_x + kw; // 获取输入特征和权重的一个块数据 tile_type data_tile, weight_tile; // 有padding会越界 if(in_h >= 0 && in_h < in_height && in_w >= 0 && in_w < in_width){ data_tile = input_feature[in_width*in_height*tile_index + in_width*in_h + in_w]; weight_tile = weight[kernel_width*kernel_height*div_tile_num*out_index + kernel_width*kernel_height*tile_index + kernel_width*kh+kw]; }else{ data_tile = 0; weight_tile = 0; } // 块数据相乘 mul_tile_type mul_tile_data; for(int k = 0; k < K; ++ k) mul_tile_data.range(k*32+31, k*32) = (data_type)data_tile.range(k*16+15, k*16)* (data_type)weight_tile.range(k*16+15, k*16); // 相乘结果累加 for(int k = 0; k < K; ++ k) sum += (mul_tile_type)mul_tile_data.range(k*32+31, k*32); if(tile_index == div_tile_num-1 && kh == kernel_height-1 && kw == kernel_width-1){ // 激活函数 if(relu_en & sum < 0) sum = 0; // 截断多余精度 acc_type res = sum >> out_truncate; if (res > 32767) res = 32767; else if (res < -32768) res = -32768; // 先缓存下来,下面一次写入 out_tile.range((out_index % K) * 16 + 15, (out_index % K) * 16) = res; sum = 0; // 存tile里的一个数据 // 一个tile都存完了或者存到最后一个通道凑不够一个tile if((out_index%K) == K - 1 || out_index == (out_channel - 1)){ output_feature[(out_index/K)*out_width*out_height + out_width*i+j] = out_tile; out_tile = 0; } } } } } } } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
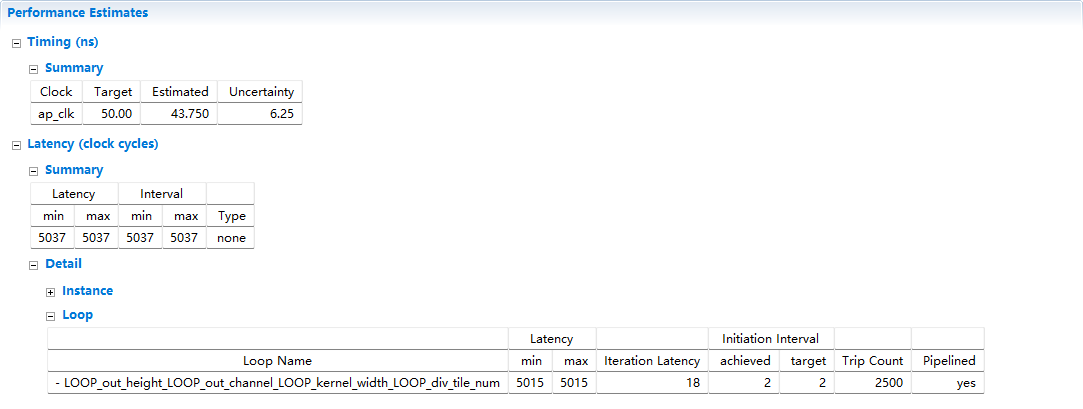
C综合已经达到我们的预期了
访问方式的优化-通道方向的并行
给特征图和权重分别分配一条总线,那么就可以同时取出两个数据,只需要一个周期就可以完成一次tile的计算
bundle:一捆,不选的话默认是同一个总线
所以这里我们给input_feature和weight取两个不同的名字,就给它们分配了不同的总线:
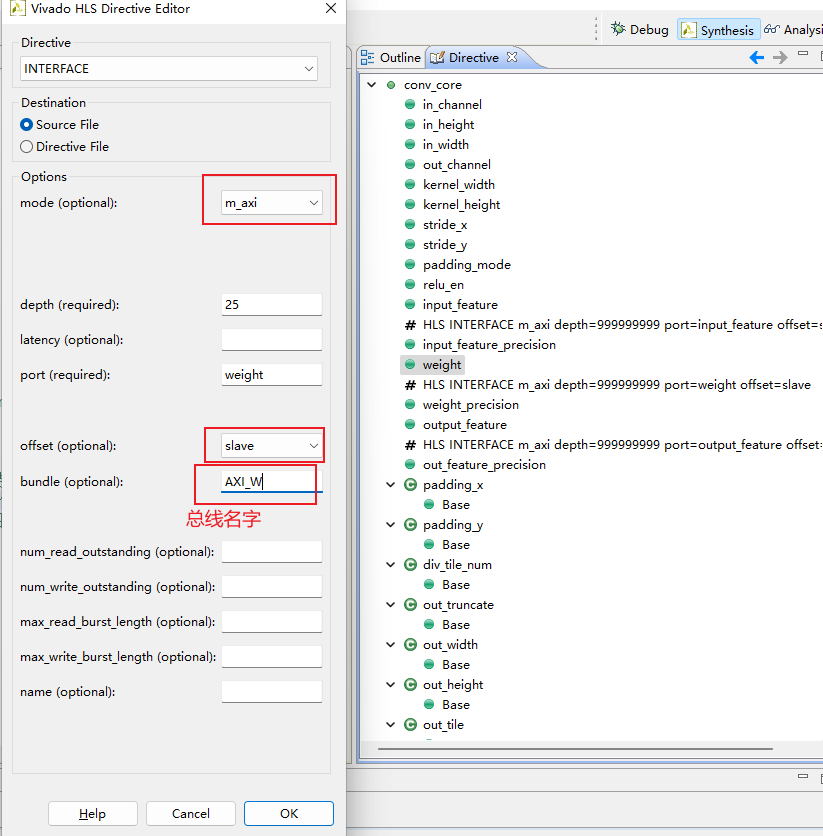
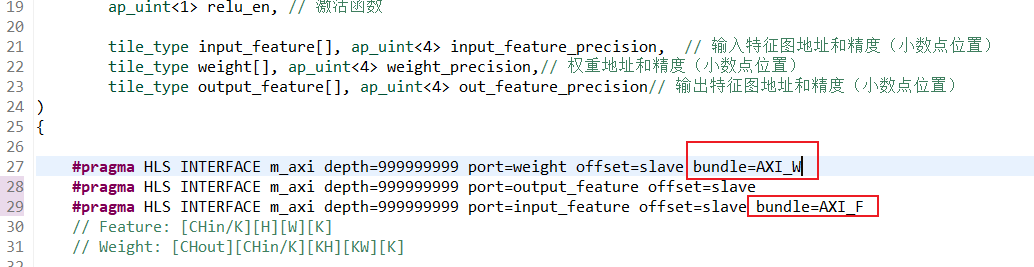
AXI是全双工的,可以同时写和读,但是同时读两个就不太行,读一个的同时写一个可以。所以不需要给output_feature分配一个总线
然后我们就可以在一个周期内运行一次tile计算,设置pipeline的II = 1:

也就是K个数据的乘法和累加,需要K个乘法器同时进行
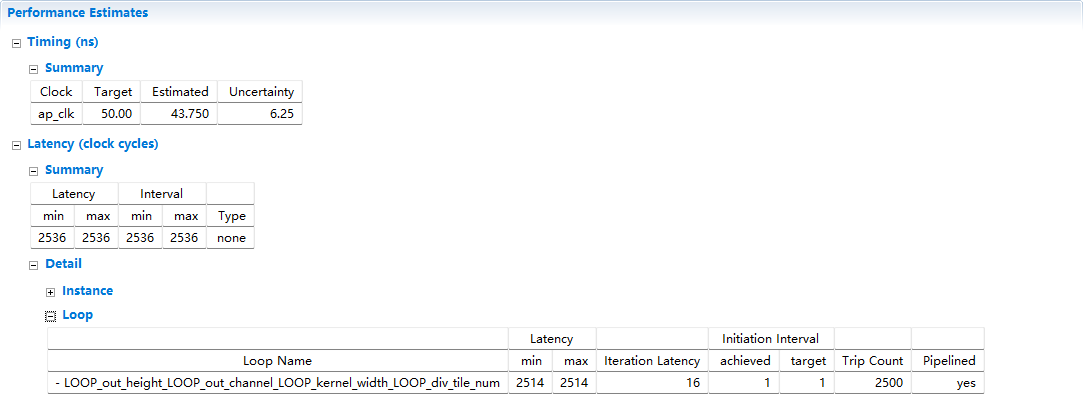
可以看出来是2500个周期:
1*10*10*5*5*(1 clock)=2500 -
相关阅读:
图论:自反与对称
使用 typescript + express 创建 NodeJs 后端服务
JDK17和JDK8完美卸载方法及新版JDK安装教程
JMeter 4.0 如何获取cookie
C语言对10个数进行排序,使用快速排序算法
十、Linux运行级别
mybatis实战:四、insert 用法(普通插入、返回主键自增的值)
【7】C语言进阶--程序的编译(预处理操作)+链接
ElasticSearch 爬坑记录
Python 算法高级篇:分治算法的原理与应用
- 原文地址:https://blog.csdn.net/qq_45364953/article/details/127708973
