-
【UDS】ISO14229之0x31服务
前言
简称: “RoutineControl”,例程控制
功能: 该服务执行指定的步骤操作并获取相关结果,相比0x2F服务,具有较大的灵活性,可用于较为复杂类型的控制。一般应用包括清除内存(多数用在更新ECU软件),重置或学习自适应数据,运行自检,方向盘角度零点标定等。
一、理论描述
程序控制类型的定义如下表:
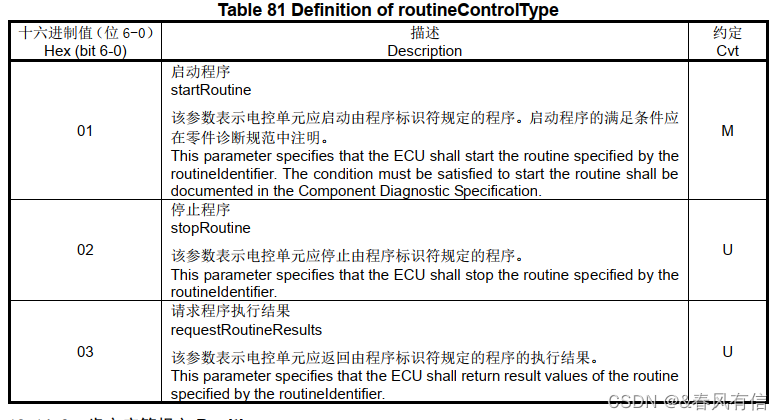
01: 若响应消息是肯定或否定,表示请求已经执行或即将执行,则需在完成01请求消息和完成首个响应消息之间的某段时间内启动例程。
02: 若响应消息是肯定或否定,表示停止例程的请求已经执行或即将执行,则需在完成02请求消息和完成首个响应消息之后停止例程。
03: 使用该子功能请求例程的结果(如退出状态),该结果是ECU执行例程所产生的结果。(不太常用~~)二、使用步骤
1.请求
这里博主就只说Sub-Function 为 01的情况,目前项目中也只用到该服务,02也简单就不说了。
例如: 诊断服务更新或刷写ECU程序之前,需要请求该服务项,检查是否满足刷写程序的条件。
某整车厂针对0x31服务的需求如下,(注:M表示强制要求,U表示可选)
Sub-Function: 01 (M),02 (U),03 (U)
RoutineIdentifier: 0x0203,软件刷写条件预检查
满足刷写的条件: 车速 < 5km/h,车辆处于非充电状态(新能源车型),车辆处于驻车状态。请求报文: 31 01 02 03
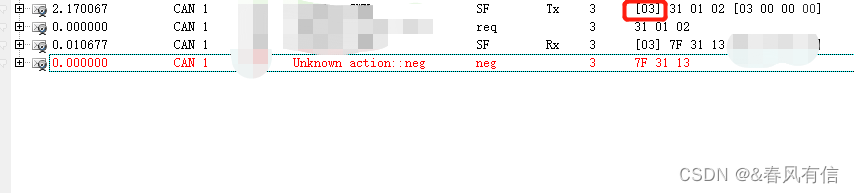
在请求该服务前,我们先制造一个不满足刷写条件的条件,如车速。该报文是我们ECU接收到的报文。

车速 6km/h > 条件5km/h,即不满足刷写条件,请求报文如下图:

红框:我们请求的报文
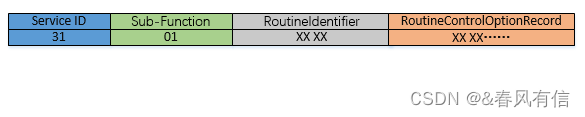
Service ID:31
Sub-Function:01
RoutineIdentifier:02 03
RoutineControlOptionRecord:无,可选项。2.响应
1)正响应

Routine StatusRecord: 即请求之后的状态,如:00表示刷写条件满足,01表示刷写条件不满足。
参见CANoe图中的蓝框
2)否定响应
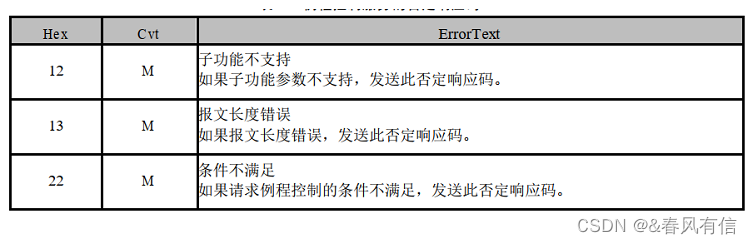
支持的否定响应如下,一般工作上根据整车厂给的诊断输入文档来选择要支持的NRC码。

博主平日项目中支持NRC如下:
NRC12: Sub-Function不支持(请求数据 31 FF 02 03。而你请求的子功能FF根本找不到啊,规范里也没有该子服务,ECU收到你这条报文,无法识别subfunc,因此回复该NRC)

NRC13: 请求报文数据长度有误(正确请求数据31 01 02 03 有4个字节。而你请求的是31 01 02只有3个字节,ECU收到你这条报文,无法理解,因此回复该NRC)
NRC22: 请求条件不满足
(一般整车厂会告诉你NRC22的满足条件,例如:车速>3km/h,电源过欠压时候,请求服务,ECU便回复该NRC)NRC31: 请求超出范围(不按套路出牌,发送 31 01 66 66,RoutineIdentifier有66 66?)
NRC33: 安全访问拒绝(在请求31服务之前,必须先解锁,否则ECU回复NRC33)
总结
0x31服务在实际运用中要比0x2F复杂些,但那又怎样,通过本章讲解是否对该服务熟悉那么一勾勾呢?
下一章 DTC控制 0x85服务见! -
相关阅读:
vue实现的商品列表网页
软件测试周刊(第84期):这个世界根本不存在“不会做”、“不能做”,只有“不想做”和“不敢做”,当你失去所有依靠的时候,你自然就什么都会了。
福建省发改委福州市营商办莅临育润大健康事业部指导视察工作
【初阶C语言】操作符2---表达式求值
Apache Airflow (一) : Airflow架构及
微信小程序开发学习文档(万字总结,一篇搞定前端开发)
【SA8295P 源码分析 (二)】68 - Android 侧用户层 输入子系统获取 /dev/input/event0 节点数据 代码流程分析
RTP相关
长风破浪会有时,直挂云帆济沧海!(工作室年会总结)
Docker 安装 Gitlab
- 原文地址:https://blog.csdn.net/weixin_48498880/article/details/127699636