-
Ceres学习笔记004--使用Ceres进行2D圆拟合
使用Ceres进行2D圆拟合
1 构建最小二乘问题
2D 圆的一般方程为:
( x − a ) 2 + ( y − b ) 2 = r 2 (1) (x-a)^2 + (y - b)^2 = r^2 \tag{1} (x−a)2+(y−b)2=r2(1)
式中, ( a , b ) (a,b) (a,b)为圆心坐标, r r r为半径。假设有 k 个 2D 观测点数据 ( x i , y i ) , i = 1 , 2 , . . . , k (x_i,y_i),i = 1,2,...,k (xi,yi),i=1,2,...,k ,根据观测点数据拟合圆,并获取拟合圆的圆心 ( a , b ) (a,b) (a,b) 和半径 r r r ,可以先构建如下非线性最小二乘问题:
m i n 1 2 ∑ i = 1 k ∣ ∣ r 2 − ( x i − a ) 2 − ( y i − b ) 2 ∣ ∣ 2 (2) min\frac{1}{2}\sum_{i = 1}^k||r^2 - (x_i - a)^2 - (y_i - b)^2||^2 \tag{2} min21i=1∑k∣∣r2−(xi−a)2−(yi−b)2∣∣2(2)
式中,将代价函数 f ( a , b , r ) f(a,b,r) f(a,b,r) 定义为:
f ( a , b , r ) = r 2 − [ ( x i − a ) 2 + ( y i − b ) 2 ] (3) f(a,b,r) = r^2 - [(x_i - a)^2 + (y_i - b)^2] \tag{3} f(a,b,r)=r2−[(xi−a)2+(yi−b)2](3)
而不是:
f ( a , b , r ) = r − ( x i − a ) 2 + ( y i − b ) 2 (4) f(a,b,r) = r - \sqrt{(x_i - a)^2 + (y_i - b)^2} \tag{4} f(a,b,r)=r−(xi−a)2+(yi−b)2(4)
式(4)表示观测点到圆心的距离,看似比较直观、合理,但其中的根号运算让代价函数更加非线性;式(3)虽然严格意义上不能表示点到圆心的距离,但通常更加鲁棒(尤其是存在外点时),这是因为代价函数更符合凸函数,更容易找到期望的最小值。
但由此也会带来一个问题,估计出来的半径 r r r 可能是负值,与实际不符,需要增加约束,重新构建非线性最小二乘问题,有如下两种方案:
1.令 r = m 2 r = m^2 r=m2 ,那么带估计的参数将变成 ( a , b , m ) (a,b,m) (a,b,m) ,代价函数如下:
f ( a , b , m ) = m 4 − [ ( x i − a ) 2 + ( y i − b ) 2 ] (5) f(a,b,m) = m^4 - [(x_i - a)^2 + (y_i - b)^2] \tag{5} f(a,b,m)=m4−[(xi−a)2+(yi−b)2](5)
那么,即使估计出的 m 值为负, r = m 2 r =m^2 r=m2 仍然为正值。 2.令 r 2 = r 2 r_2 = r^2 r2=r2 待估计的参数将变成 ( a , b , r 2 ) (a,b,r_2) (a,b,r2), 代价函数如下:
f ( a , b , r 2 ) = r 2 − [ ( x i − a ) 2 + ( y i − b ) 2 ] (6) f(a,b,r_2) = r_2 - [(x_i - a)^2 + (y_i - b)^2] \tag{6} f(a,b,r2)=r2−[(xi−a)2+(yi−b)2](6)
那么,估计出的 r 2 r_2 r2 肯定是正值, r = r 2 r = \sqrt{r_2} r=r2 也是正值。下面将对(5)(6)两式分别采用自动微分法和解析解法来实现。
2 生成数据
以圆心坐标 ( a , b ) = ( 300 , 200 ) (a,b) = (300,200) (a,b)=(300,200) ,半径 r = 100 r = 100 r=100 为标准圆,加入标准差 s i g m a = 1.0 sigma =1.0 sigma=1.0 的零均值高斯分布噪声,生成 k = 100 k= 100 k=100 个点,生成方程如下:
{ x i = a + r ∗ c o s i ∗ 2 π k + N ( 0 , σ 2 ) y i = b + r ∗ s i n i ∗ 2 π k + N ( 0 , σ 2 ) (7) \left\{\right. \tag{7} {xi=a+r∗coski∗2π+N(0,σ2)yi=b+r∗sinki∗2π+N(0,σ2)(7)x i = a + r ∗ c o s i ∗ 2 π k + N ( 0 , σ 2 ) y i = b + r ∗ s i n i ∗ 2 π k + N ( 0 , σ 2 ) 3 代码实践
3.1 circlefit_m_autodiff
完整代码如下:
#include "ceres/ceres.h" #include "gflags/gflags.h" #include "glog/logging.h" #include "opencv2/core.hpp" #include "easyx.h" // 用户自定义残差计算模型 struct DistanceFromCircleCost { // 样本数据观测值通过构造函数传入 DistanceFromCircleCost(double x, double y) : x_(x), y_(y) {} templatebool operator()(const T* const a, const T* const b, const T* const m, T* residual) const { // 输出残差维度为1 // 输入3个参数块,每个参数块的维度为1 T xp = x_ - a[0]; T yp = y_ - b[0]; residual[0] = m[0] * m[0] * m[0] * m[0] - xp * xp - yp * yp; return true; } private: const double x_; const double y_; }; int main (int argc, char** argv) { google::InitGoogleLogging(argv[0]); // 生成数据 const int kNumObservations = 100; // 生成100个点 double sigma = 1.0; // 标准差 cv::RNG rng; // OpenCV随机数产生器 double data[2 * kNumObservations]; double a_ideal = 300.0; double b_ideal = 200.0; double r_ideal = 100.0; for (int i = 0; i < kNumObservations; ++i) { double x = a_ideal + r_ideal * std::cos(i * CV_2PI / kNumObservations); double y = b_ideal + r_ideal * std::sin(i * CV_2PI / kNumObservations); double noise_x = rng.gaussian(sigma); double noise_y = rng.gaussian(sigma); data[2 * i] = x + noise_x; data[2 * i + 1] = y + noise_y; } // 随机加入异常点 data[20] = 300.0, data[21] = 200.0; data[22] = 100.0, data[23] = 150.0; data[50] = 500.0, data[51] = 100.0; // 设置参数初始值 // 输入3个参数块,每个参数块的维度为1 const double initial_a = 0; const double initial_b = 0; const double initial_m = 1; double a = initial_a; double b = initial_b; double m = initial_m; // 构建非线性最小二乘问题 ceres::Problem problem; for (int i = 0; i < kNumObservations; ++i) { // 添加残差块,需要依次指定代价函数、损失函数、参数块 // 本例中损失函数为Huber函数 problem.AddResidualBlock( // 输出残差维度为1,输出参数块有3个,每个参数块维度都为1 new ceres::AutoDiffCostFunction - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
迭代结果如下:
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time 0 1.382256e+07 0.00e+00 5.97e+04 0.00e+00 0.00e+00 1.00e+04 0 6.99e-03 7.54e-03 1 5.407934e+19 -5.41e+19 5.97e+04 2.71e+04 -7.84e+12 5.00e+03 1 1.31e-03 9.40e-03 2 5.308636e+19 -5.31e+19 5.97e+04 2.70e+04 -7.70e+12 1.25e+03 1 6.97e-04 1.02e-02 3 4.753642e+19 -4.75e+19 5.97e+04 2.63e+04 -6.90e+12 1.56e+02 1 6.16e-04 1.09e-02 4 1.790201e+19 -1.79e+19 5.97e+04 2.06e+04 -2.60e+12 9.77e+00 1 6.28e-04 1.16e-02 5 9.529089e+14 -9.53e+14 5.97e+04 1.76e+03 -1.45e+08 3.05e-01 1 5.90e-04 1.23e-02 6 4.368009e+16 -4.37e+16 5.97e+04 4.57e+03 -9.53e+09 4.77e-03 1 5.82e-04 1.29e-02 7 3.575734e+10 -3.57e+10 5.97e+04 1.37e+02 -2.08e+05 3.73e-05 1 5.88e-04 1.36e-02 8 1.381984e+07 2.71e+03 5.97e+04 1.08e+00 1.98e+00 1.12e-04 1 3.69e-03 1.73e-02 9 1.381536e+07 4.48e+03 5.97e+04 3.62e-01 1.09e+00 3.35e-04 1 3.87e-03 2.12e-02 10 1.380116e+07 1.42e+04 5.97e+04 6.80e-01 1.16e+00 1.01e-03 1 4.07e-03 2.54e-02 11 1.375778e+07 4.34e+04 5.96e+04 1.04e+00 1.18e+00 3.02e-03 1 4.79e-03 3.03e-02 12 1.362882e+07 1.29e+05 6.13e+04 1.70e+00 1.19e+00 9.05e-03 1 4.03e-03 3.44e-02 13 1.325494e+07 3.74e+05 1.37e+05 3.67e+00 1.19e+00 2.72e-02 1 3.85e-03 3.84e-02 14 1.223981e+07 1.02e+06 2.93e+05 9.40e+00 1.20e+00 8.15e-02 1 4.21e-03 4.27e-02 15 9.928699e+06 2.31e+06 5.63e+05 2.27e+01 1.22e+00 2.44e-01 1 4.19e-03 4.70e-02 16 6.583481e+06 3.35e+06 8.25e+05 4.03e+01 1.26e+00 7.33e-01 1 3.90e-03 5.10e-02 17 4.203227e+06 2.38e+06 5.50e+05 4.44e+01 1.25e+00 2.20e+00 1 4.07e-03 5.52e-02 18 3.586101e+06 6.17e+05 4.31e+05 2.44e+01 1.35e+00 6.60e+00 1 4.30e-03 5.96e-02 19 2.943270e+06 6.43e+05 3.15e+05 3.29e+01 1.24e+00 1.98e+01 1 4.07e-03 6.39e-02 20 1.664384e+06 1.28e+06 1.47e+05 8.29e+01 1.30e+00 5.94e+01 1 3.67e-03 6.77e-02 21 9.567219e+05 7.08e+05 1.11e+05 5.36e+01 1.38e+00 1.78e+02 1 3.60e-03 7.14e-02 22 4.339197e+05 5.23e+05 2.81e+05 5.60e+01 1.27e+00 5.35e+02 1 4.97e-03 7.66e-02 23 1.577583e+05 2.76e+05 4.07e+05 4.03e+00 1.57e+00 1.60e+03 1 3.98e-03 8.07e-02 24 9.851760e+04 5.92e+04 1.61e+05 3.88e-01 1.72e+00 4.81e+03 1 3.64e-03 8.45e-02 25 9.756555e+04 9.52e+02 1.21e+05 1.02e-01 1.71e+00 1.44e+04 1 4.22e-03 8.88e-02 26 9.706839e+04 4.97e+02 1.04e+05 4.18e-02 1.83e+00 4.33e+04 1 4.69e-03 9.39e-02 27 9.669641e+04 3.72e+02 8.03e+04 2.64e-02 1.82e+00 1.30e+05 1 3.83e-03 9.78e-02 28 9.656395e+04 1.32e+02 4.81e+04 1.01e-02 1.68e+00 3.90e+05 1 3.68e-03 1.02e-01 29 9.653603e+04 2.79e+01 3.28e+04 4.65e-03 1.63e+00 1.17e+06 1 4.04e-03 1.06e-01 30 9.651426e+04 2.18e+01 3.21e+04 6.67e-03 1.98e+00 3.51e+06 1 5.25e-03 1.11e-01 31 9.648512e+04 2.91e+01 3.21e+04 7.54e-03 2.00e+00 1.05e+07 1 4.21e-03 1.16e-01 32 9.645172e+04 3.34e+01 3.21e+04 7.12e-03 2.00e+00 3.16e+07 1 4.01e-03 1.20e-01 33 9.641834e+04 3.34e+01 3.20e+04 6.36e-03 2.00e+00 9.47e+07 1 3.96e-03 1.24e-01 34 9.639493e+04 2.34e+01 1.83e+04 5.35e-03 1.77e+00 2.84e+08 1 4.29e-03 1.29e-01 35 9.638998e+04 4.95e+00 1.60e+04 1.70e-03 1.80e+00 8.52e+08 1 3.84e-03 1.33e-01 36 9.638467e+04 5.31e+00 1.60e+04 1.77e-03 2.00e+00 2.56e+09 1 4.00e-03 1.37e-01 37 9.637927e+04 5.39e+00 1.37e+04 2.44e-03 1.94e+00 7.67e+09 1 3.75e-03 1.41e-01 38 9.637505e+04 4.23e+00 1.12e+04 4.00e-03 1.91e+00 2.30e+10 1 4.04e-03 1.45e-01 39 9.637144e+04 3.60e+00 9.68e+03 4.83e-03 1.97e+00 6.90e+10 1 4.47e-03 1.49e-01 40 9.636863e+04 2.81e+00 6.51e+03 5.05e-03 1.86e+00 2.07e+11 1 4.09e-03 1.54e-01 41 9.636634e+04 2.29e+00 5.26e+03 5.23e-03 1.98e+00 6.21e+11 1 3.76e-03 1.57e-01 42 9.636431e+04 2.04e+00 4.81e+03 5.02e-03 2.00e+00 1.86e+12 1 3.97e-03 1.61e-01 43 9.636257e+04 1.73e+00 4.74e+03 4.42e-03 2.00e+00 5.59e+12 1 4.28e-03 1.66e-01 44 9.636156e+04 1.01e+00 2.04e+03 3.39e-03 1.59e+00 1.68e+13 1 3.83e-03 1.70e-01 45 9.636126e+04 2.99e-01 1.25e+03 2.01e-03 1.59e+00 5.03e+13 1 3.90e-03 1.74e-01 46 9.636115e+04 1.13e-01 1.04e+03 1.24e-03 1.66e+00 1.51e+14 1 5.35e-03 1.79e-01 Solver Summary (v 2.0.0-eigen-(3.3.8)-no_lapack-eigensparse-no_openmp) Original Reduced Parameter blocks 3 3 Parameters 3 3 Residual blocks 100 100 Residuals 100 100 Minimizer TRUST_REGION Dense linear algebra library EIGEN Trust region strategy LEVENBERG_MARQUARDT Given Used Linear solver DENSE_QR DENSE_QR Threads 1 1 Linear solver ordering AUTOMATIC 3 Cost: Initial 1.382256e+07 Final 9.636115e+04 Change 1.372620e+07 Minimizer iterations 47 Successful steps 40 Unsuccessful steps 7 Time (in seconds): Preprocessor 0.000552 Residual only evaluation 0.010958 (47) Jacobian & residual evaluation 0.134731 (40) Linear solver 0.018897 (47) Minimizer 0.181130 Postprocessor 0.000083 Total 0.181765 Termination: CONVERGENCE (Function tolerance reached. |cost_change|/cost: 5.805692e-07 <= 1.000000e-06) initial a: 0->300.266 initial b: 0->199.758 initial r: 1->100.023- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
最终拟合得到的圆的圆心 ( a , b ) = ( 300.266 , 199.758 ) (a,b) = (300.266,199.758) (a,b)=(300.266,199.758) ,半径 r = 100.023 r = 100.023 r=100.023。
收敛后的残差值仍然很大,这是因为,代价函数并非是直接表示半径 r r r,观测点与圆心距离 d d d 这两者间的偏差,即并非是 r − d r-d r−d ,而是定义成了 r 2 − d 2 = ( r − d ) ∗ ( r + d ) r^2 - d^2 = (r -d)*(r+d) r2−d2=(r−d)∗(r+d),偏差相当于被放大了 ( r + d ) (r+d) (r+d) 倍,加上残差又是代价函数的平方,也就是还要再被放大一次,因此最终收敛后的残差值很大。
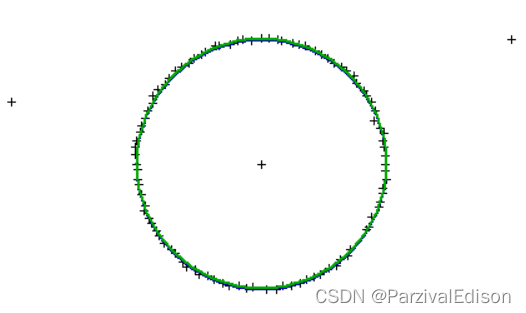
图中,+ 表示观测点,蓝色的圆是理想圆,绿色的圆是鲁棒拟合圆,两个圆基本重合。 由于加入了异常点,因此使用了 Huber 损失函数降低异常点对拟合的影响。
如果去掉损失函数,即 LossFunction = NULL,仅使用一般的最小二乘拟合圆,结果如下:
iter cost cost_change |gradient| |step| tr_ratio tr_radius ls_iter iter_time total_time 0 1.092554e+12 0.00e+00 8.92e+09 0.00e+00 0.00e+00 1.00e+04 0 6.96e-03 7.56e-03 1 2.738082e+37 -2.74e+37 8.92e+09 2.93e+04 -2.51e+25 5.00e+03 1 1.35e-03 9.51e-03 2 2.615438e+37 -2.62e+37 8.92e+09 2.92e+04 -2.40e+25 1.25e+03 1 7.22e-04 1.04e-02 3 1.990936e+37 -1.99e+37 8.92e+09 2.82e+04 -1.82e+25 1.56e+02 1 6.62e-04 1.12e-02 4 1.799492e+36 -1.80e+36 8.92e+09 2.09e+04 -1.65e+24 9.77e+00 1 6.66e-04 1.21e-02 5 3.165118e+30 -3.17e+30 8.92e+09 3.99e+03 -3.01e+18 3.05e-01 1 1.04e-03 1.32e-02 6 4.039797e+31 -4.04e+31 8.92e+09 5.47e+03 -5.47e+19 4.77e-03 1 8.75e-04 1.43e-02 7 2.550254e+19 -2.55e+19 8.92e+09 1.62e+02 -9.20e+08 3.73e-05 1 6.61e-04 1.51e-02 8 1.092040e+12 5.14e+08 8.92e+09 1.29e+00 2.33e+00 1.12e-04 1 3.29e-03 1.86e-02 9 1.091327e+12 7.12e+08 8.91e+09 3.26e-01 1.07e+00 3.35e-04 1 3.52e-03 2.22e-02 10 1.089062e+12 2.27e+09 8.90e+09 6.65e-01 1.14e+00 1.01e-03 1 3.71e-03 2.61e-02 11 1.082074e+12 6.99e+09 8.87e+09 1.08e+00 1.18e+00 3.02e-03 1 4.46e-03 3.06e-02 12 1.061380e+12 2.07e+10 9.50e+09 1.80e+00 1.18e+00 9.05e-03 1 4.34e-03 3.51e-02 13 1.002511e+12 5.89e+10 2.06e+10 3.95e+00 1.17e+00 2.72e-02 1 3.53e-03 3.88e-02 14 8.511883e+11 1.51e+11 4.04e+10 1.02e+01 1.15e+00 8.15e-02 1 3.51e-03 4.25e-02 15 5.528670e+11 2.98e+11 6.14e+10 2.49e+01 1.10e+00 2.44e-01 1 3.94e-03 4.65e-02 16 2.220276e+11 3.31e+11 5.47e+10 4.65e+01 1.03e+00 7.33e-01 1 3.56e-03 5.03e-02 17 7.378387e+10 1.48e+11 2.09e+10 5.50e+01 9.82e-01 2.20e+00 1 3.33e-03 5.38e-02 18 4.094784e+10 3.28e+10 9.08e+08 4.70e+01 1.00e+00 6.60e+00 1 3.35e-03 5.74e-02 19 1.786394e+10 2.31e+10 1.82e+09 6.84e+01 1.01e+00 1.98e+01 1 3.50e-03 6.12e-02 20 2.255007e+09 1.56e+10 4.34e+08 9.32e+01 1.00e+00 5.94e+01 1 4.00e-03 6.54e-02 21 1.355118e+09 9.00e+08 2.95e+08 2.74e+01 9.70e-01 1.78e+02 1 3.39e-03 6.89e-02 22 1.327190e+09 2.79e+07 6.98e+06 5.59e-01 1.00e+00 5.35e+02 1 3.44e-03 7.25e-02 23 1.327176e+09 1.39e+04 1.71e+04 5.44e-03 1.00e+00 1.60e+03 1 3.45e-03 7.61e-02 Solver Summary (v 2.0.0-eigen-(3.3.8)-no_lapack-eigensparse-no_openmp) Original Reduced Parameter blocks 3 3 Parameters 3 3 Residual blocks 100 100 Residuals 100 100 Minimizer TRUST_REGION Dense linear algebra library EIGEN Trust region strategy LEVENBERG_MARQUARDT Given Used Linear solver DENSE_QR DENSE_QR Threads 1 1 Linear solver ordering AUTOMATIC 3 Cost: Initial 1.092554e+12 Final 1.327176e+09 Change 1.091227e+12 Minimizer iterations 24 Successful steps 17 Unsuccessful steps 7 Time (in seconds): Preprocessor 0.000602 Residual only evaluation 0.005418 (24) Jacobian & residual evaluation 0.052757 (17) Linear solver 0.009628 (24) Minimizer 0.076465 Postprocessor 0.000057 Total 0.077125 Termination: CONVERGENCE (Function tolerance reached. |cost_change|/cost: 6.254251e-11 <= 1.000000e-06) initial a: 0->301.317 initial b: 0->194.53 initial r: 1->103.131- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
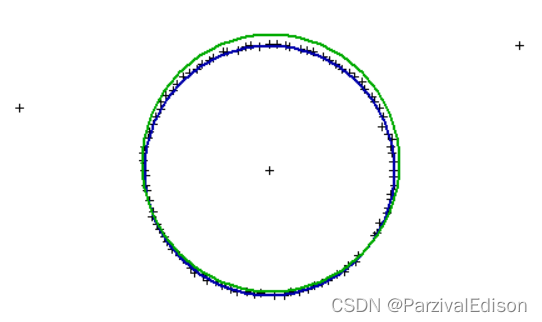
两圆明显不重合。3.2 circlefit_r2_autodiff
完整代码如下:
#include "ceres/ceres.h" #include "gflags/gflags.h" #include "glog/logging.h" #include "opencv2/core.hpp" #include "easyx.h" // 用户自定义残差计算模型 struct DistanceFromCircleCost { // 样本数据观测值通过构造函数传入 DistanceFromCircleCost(double x, double y) : x_(x), y_(y) {} templatebool operator()(const T* const a, const T* const b, const T* const r2, T* residual) const { // 输出残差维度为1 // 输入3个参数块,每个参数块的维度为1 T xp = x_ - a[0]; T yp = y_ - b[0]; residual[0] = r2[0] - xp * xp - yp * yp; return true; } private: const double x_; const double y_; }; int main(int argc, char** argv) { google::InitGoogleLogging(argv[0]); // 生成数据 const int kNumObservations = 100; // 生成100个点 double sigma = 1.0; // 标准差 cv::RNG rng; // OpenCV随机数产生器 double data[2 * kNumObservations]; double a_ideal = 300.0; double b_ideal = 200.0; double r_ideal = 100.0; for (int i = 0; i < kNumObservations; ++i) { double x = a_ideal + r_ideal * std::cos(i * CV_2PI / kNumObservations); double y = b_ideal + r_ideal * std::sin(i * CV_2PI / kNumObservations); double noise_x = rng.gaussian(sigma); double noise_y = rng.gaussian(sigma); data[2 * i] = x + noise_x; data[2 * i + 1] = y + noise_y; } // 随机加入异常点 data[20] = 300.0, data[21] = 200.0; data[22] = 100.0, data[23] = 150.0; data[50] = 500.0, data[51] = 100.0; // 设置参数初始值 // 输入3个参数块,每个参数块的维度为1 const double initial_a = 0; const double initial_b = 0; const double initial_r = 0; double a = initial_a; double b = initial_b; double r2 = initial_r * initial_r; // 构建非线性最小二乘问题 ceres::Problem problem; for (int i = 0; i < kNumObservations; ++i) { // 添加残差块,需要依次指定代价函数、损失函数、参数块 // 本例中损失函数为Huber函数 problem.AddResidualBlock( // 输出残差维度为1,输出参数块有3个,每个参数块维度都为1 new ceres::AutoDiffCostFunction - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
迭代结果与前向代码结果相同。
3.3 circlefit_m_analytic
对于代价函数 f ( a , b , m ) = m 4 − ( x − a ) 2 − ( y − b ) 2 f(a,b,m) = m^4 - (x-a)^2 - (y - b)^2 f(a,b,m)=m4−(x−a)2−(y−b)2 ,偏导数如下:
{ ∂ f ∂ a = 2 ∗ ( x i − a ) ∂ f ∂ b = 2 ∗ ( y i − b ) ∂ f ∂ m = 4 ∗ m 3 \left\{\right. ⎩ ⎨ ⎧∂a∂f=2∗(xi−a)∂b∂f=2∗(yi−b)∂m∂f=4∗m3∂ f ∂ a = 2 ∗ ( x i − a ) ∂ f ∂ b = 2 ∗ ( y i − b ) ∂ f ∂ m = 4 ∗ m 3
完整代码如下:#include "ceres/ceres.h" #include "glog/logging.h" #include "gflags/gflags.h" #include "easyx.h" #include "opencv2/core.hpp" class DIstanceFromCircleCost : public ceres::SizedCostFunction<1,1,1,1> { public: DIstanceFromCircleCost(double x, double y): x_(x), y_(y) {} // 用户自定义残差计算方法 virtual bool Evaluate(double const* const* x, double* residuals, double** jacobians) const { // 本例中有3个输入参数块,每个参数块中有1个参数 double a = x[0][0]; double b = x[1][0]; double m = x[2][0]; // 本例中输出残差维度为1 double xp = x_ - a; double yp = y_ - b; residuals[0] = m * m * m * m - xp * xp - yp * yp; if(jacobians == NULL) { return true; } // 残差对第1个参数块中的参数依次求偏导,即对a求偏导 if(jacobians[0] != NULL) { jacobians[0][0] = 2 * xp; } // 残差对第2个参数块中的参数依次求偏导,即对b求偏导 if(jacobians[1] != NULL) { jacobians[1][0] = 2 * yp; } // 残差对第3个参数块中的参数依次求偏导,即对m求偏导 if(jacobians[2] != NULL) { jacobians[2][0] = 4 * m * m * m; } return true; } private: const double x_; const double y_; }; int main(int argc, char** argv) { google::InitGoogleLogging(argv[0]); // 生成数据 const int kNumObservations = 100; // 生成100个点 double sigma = 1.0; // 标准差 cv::RNG rng; // OpenCV随机数产生器 double data[2 * kNumObservations]; double a_ideal = 300.0; double b_ideal = 200.0; double r_ideal = 100.0; for (int i = 0; i < kNumObservations; ++i) { double x = a_ideal + r_ideal * std::cos(i * CV_2PI / kNumObservations); double y = b_ideal + r_ideal * std::sin(i * CV_2PI / kNumObservations); double noise_x = rng.gaussian(sigma); double noise_y = rng.gaussian(sigma); data[2 * i] = x + noise_x; data[2 * i + 1] = y + noise_y; } // 随机加入异常点 data[20] = 300.0, data[21] = 200.0; data[22] = 100.0, data[23] = 150.0; data[50] = 500.0, data[51] = 100.0; // 设置参数初始值 // 输入3个参数块,每个参数块的维度为1 const double initial_a = 0; const double initial_b = 0; const double initial_m = 0.1; double a = initial_a; double b = initial_b; double m = initial_m; // 构建非线性最小二乘问题 ceres::Problem problem; for (int i = 0; i < kNumObservations; ++i) { // 添加残差块,需要依次指定代价函数、损失函数、参数块 // 本例中损失函数为Huber函数 problem.AddResidualBlock( // 输出残差维度为1,输出参数块有3个,每个参数块维度都为1 new DIstanceFromCircleCost(data[2 * i], data[2 * i + 1]), // Huber损失函数 new ceres::HuberLoss(sigma)/*NULL*/, // 第1个参数块 &a, // 第2个参数块 &b, // 第3个参数块 &m); } // 配置求解器参数 ceres::Solver::Options options; // 设置最大迭代次数 options.max_num_iterations = 500; // 指定线性求解器来求解问题 options.linear_solver_type = ceres::DENSE_QR; // 输出每次迭代的信息 options.minimizer_progress_to_stdout = true; // 输出日志内容 ceres::Solver::Summary summary; // 开始优化求解 ceres::Solve(options, &problem, &summary); double r = m * m; // 输出优化过程及结果 std::cout << summary.FullReport() << "\n"; std::cout << "initial a: " << initial_a << "->" << a << "\n"; std::cout << "initial b: " << initial_b << "->" << b << "\n"; std::cout << "initial r: " << initial_m << "->" << r << "\n"; // 创建绘图窗口,大小为 640x480 像素 initgraph(640, 480); // 设置背景颜色为白色 setbkcolor(WHITE); cleardevice(); // 绘制观测点、十字线、黑色 setlinecolor(BLACK); for (int i = 0; i < kNumObservations; ++i) { int size = 3; double center_x = data[2 * i]; double center_y = data[2 * i + 1]; line(center_x - size, center_y, center_x + size, center_y); line(center_x, center_y - size, center_x, center_y + size); } // 绘制理想圆,蓝色,圆心(300,200),半径 100 setlinestyle(PS_SOLID, 2); setlinecolor(BLUE); circle(a_ideal, b_ideal, r_ideal); // 绘制鲁棒拟合圆,绿色 setlinecolor(GREEN); circle(a, b, r); std::system("pause"); closegraph(); return 0; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
结果与自动微分法一致。
3.4 circle_r2_analytic
对于代价函数 f ( a , b , r 2 ) = r 2 − [ ( x i − a ) 2 + ( y i − b ) 2 ] f(a,b,r2) = r2 - [(x_i - a)^2 + (y_i - b)^2] f(a,b,r2)=r2−[(xi−a)2+(yi−b)2] ,偏导函数如下:
{ ∂ f ∂ a = 2 ∗ ( x i − a ) ∂ f ∂ b = 2 ∗ ( y i − b ) ∂ f ∂ r 2 = 1 \left\{\right. ⎩ ⎨ ⎧∂a∂f=2∗(xi−a)∂b∂f=2∗(yi−b)∂r2∂f=1∂ f ∂ a = 2 ∗ ( x i − a ) ∂ f ∂ b = 2 ∗ ( y i − b ) ∂ f ∂ r 2 = 1
完整代码如下:#include "ceres/ceres.h" #include "glog/logging.h" #include "gflags/gflags.h" #include "easyx.h" #include "opencv2/core.hpp" class DIstanceFromCircleCost : public ceres::SizedCostFunction<1, 1, 1, 1> { public: DIstanceFromCircleCost(double x, double y) : x_(x), y_(y) {} // 用户自定义残差计算方法 virtual bool Evaluate(double const* const* x, double* residuals, double** jacobians) const { // 本例中有3个输入参数块,每个参数块中有1个参数 double a = x[0][0]; double b = x[1][0]; double r2 = x[2][0]; // 本例中输出残差维度为1 double xp = x_ - a; double yp = y_ - b; residuals[0] = r2 - xp * xp - yp * yp; if (jacobians == NULL) { return true; } // 残差对第1个参数块中的参数依次求偏导,即对a求偏导 if (jacobians[0] != NULL) { jacobians[0][0] = 2 * xp; } // 残差对第2个参数块中的参数依次求偏导,即对b求偏导 if (jacobians[1] != NULL) { jacobians[1][0] = 2 * yp; } // 残差对第3个参数块中的参数依次求偏导,即对m求偏导 if (jacobians[2] != NULL) { jacobians[2][0] = 1; } return true; } private: const double x_; const double y_; }; int main(int argc, char** argv) { google::InitGoogleLogging(argv[0]); // 生成数据 const int kNumObservations = 100; // 生成100个点 double sigma = 1.0; // 标准差 cv::RNG rng; // OpenCV随机数产生器 double data[2 * kNumObservations]; double a_ideal = 300.0; double b_ideal = 200.0; double r_ideal = 100.0; for (int i = 0; i < kNumObservations; ++i) { double x = a_ideal + r_ideal * std::cos(i * CV_2PI / kNumObservations); double y = b_ideal + r_ideal * std::sin(i * CV_2PI / kNumObservations); double noise_x = rng.gaussian(sigma); double noise_y = rng.gaussian(sigma); data[2 * i] = x + noise_x; data[2 * i + 1] = y + noise_y; } // 随机加入异常点 data[20] = 300.0, data[21] = 200.0; data[22] = 100.0, data[23] = 150.0; data[50] = 500.0, data[51] = 100.0; // 设置参数初始值 // 输入3个参数块,每个参数块的维度为1 const double initial_a = 0; const double initial_b = 0; const double initial_r2 = 0.1; double a = initial_a; double b = initial_b; double r2 = initial_r2; // 构建非线性最小二乘问题 ceres::Problem problem; for (int i = 0; i < kNumObservations; ++i) { // 添加残差块,需要依次指定代价函数、损失函数、参数块 // 本例中损失函数为Huber函数 problem.AddResidualBlock( // 输出残差维度为1,输出参数块有3个,每个参数块维度都为1 new DIstanceFromCircleCost(data[2 * i], data[2 * i + 1]), // Huber损失函数 new ceres::HuberLoss(sigma)/*NULL*/, // 第1个参数块 &a, // 第2个参数块 &b, // 第3个参数块 &r2); } // 配置求解器参数 ceres::Solver::Options options; // 设置最大迭代次数 options.max_num_iterations = 500; // 指定线性求解器来求解问题 options.linear_solver_type = ceres::DENSE_QR; // 输出每次迭代的信息 options.minimizer_progress_to_stdout = true; // 输出日志内容 ceres::Solver::Summary summary; // 开始优化求解 ceres::Solve(options, &problem, &summary); double r = std::sqrt(r2); // 输出优化过程及结果 std::cout << summary.FullReport() << "\n"; std::cout << "initial a: " << initial_a << "->" << a << "\n"; std::cout << "initial b: " << initial_b << "->" << b << "\n"; std::cout << "initial r: " << initial_r2 << "->" << r << "\n"; // 创建绘图窗口,大小为 640x480 像素 initgraph(640, 480); // 设置背景颜色为白色 setbkcolor(WHITE); cleardevice(); // 绘制观测点、十字线、黑色 setlinecolor(BLACK); for (int i = 0; i < kNumObservations; ++i) { int size = 3; double center_x = data[2 * i]; double center_y = data[2 * i + 1]; line(center_x - size, center_y, center_x + size, center_y); line(center_x, center_y - size, center_x, center_y + size); } // 绘制理想圆,蓝色,圆心(300,200),半径 100 setlinestyle(PS_SOLID, 2); setlinecolor(BLUE); circle(a_ideal, b_ideal, r_ideal); // 绘制鲁棒拟合圆,绿色 setlinecolor(GREEN); circle(a, b, r); std::system("pause"); closegraph(); return 0; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
结果与自动微分法一致。
-
相关阅读:
“因为内存泄漏,我的 M1 MacBook Pro 瘫痪了”
【Kafka】SpringBoot整合Kafka
安防视频监控平台EasyCVR出现“no space left on device磁盘空间不足”是什么原因?该如何解决?
探秘布隆过滤器:高效数据查找与去重利器
RuoYi-Vue新建模块
vue 如何优化首页的加载速度?vue 首页白屏是什么问题引起的?如何解决呢?
Java非Spring框架下的单元测试
第三方资源配置管理(九)
【译】.NET 7 中的性能改进(四)
2022年最新宁夏机动车签字授权人模拟考试及答案
- 原文地址:https://blog.csdn.net/qq_45006390/article/details/127648213
