-
直流无刷电机驱动基于STM32F302R8+X-NUCLEO-IHM07M1(一)
前言
主控板STM32F302R8+驱动板X-NUCLEO-IHM07M1+直流无刷电机WR36BL61,采用六步换相法实现电机的正反转驱动。
关于X-NUCLEO-IHM07M1驱动板的介绍,请阅读:
直流有刷电机驱动基于STM32F302R8+X-NUCLEO-IHM07M1(一)
直流无刷电机的驱动原理请阅读:
直流无刷电机及Matlab/Simulink驱动仿真一、STM32F302R8+X-NUCLEO-IHM07M1驱动直流无刷电机
1.1.功能需求
驱动直流无刷电机转动,并实现直流无刷电机的换向控制;按下一次按键电机正转;再按一次按键电机停止;再按一次按键电机反转;再按一次按键电机停止,以此循环。
1.2.硬件设计
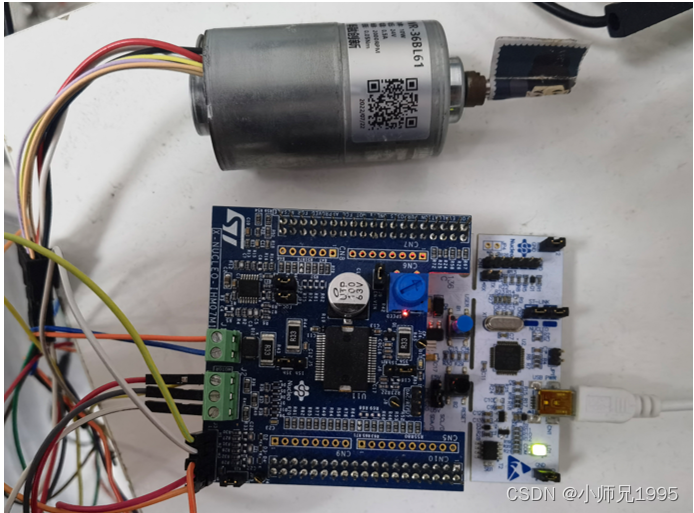
控制板:STM32F302R8
驱动板:X-NUCLEO-IHM07M1
直流无刷电机:WR36BL61,额定功率10W,额定电压24V,额定电流0.5A,转速2000RMP,极对数2。
1.3.软件设计
1.3.1.STM32CubeMX底层配置
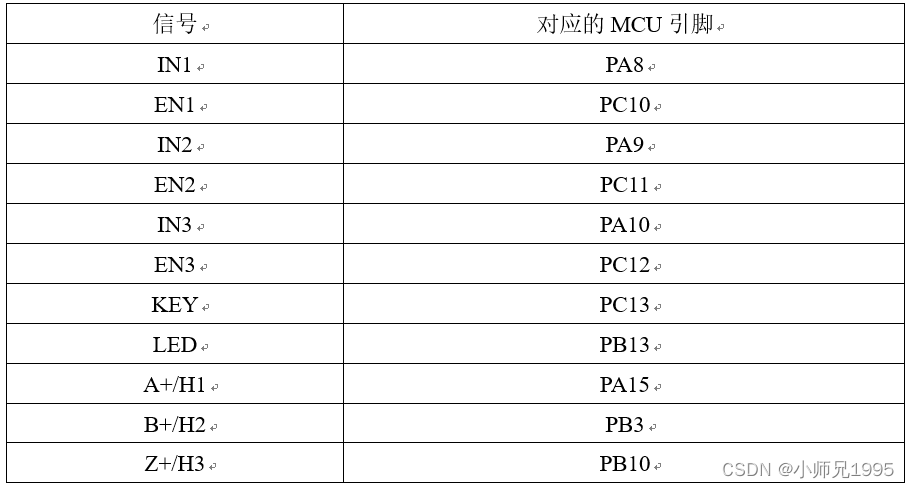
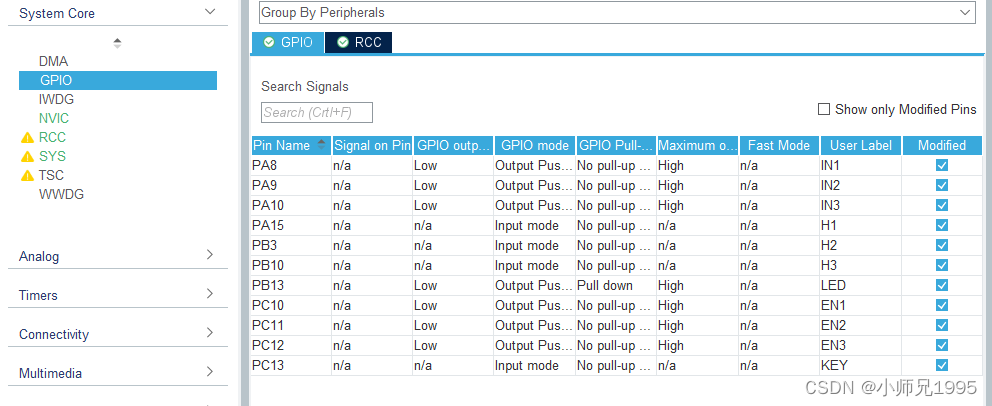
为了更直观简单的实现直流无刷电机的六步换相控制,将所用引脚均设置为普通I/O口模式。
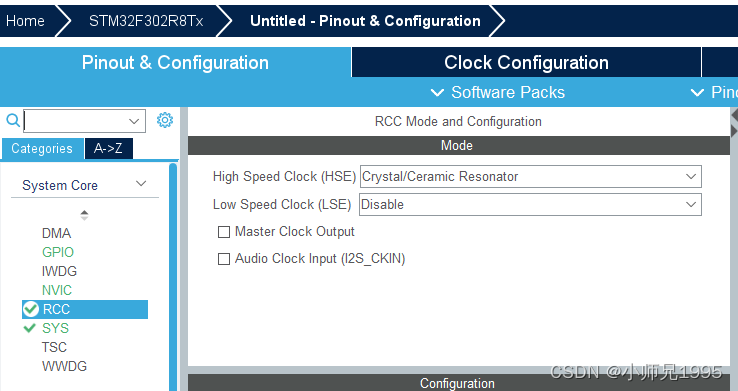
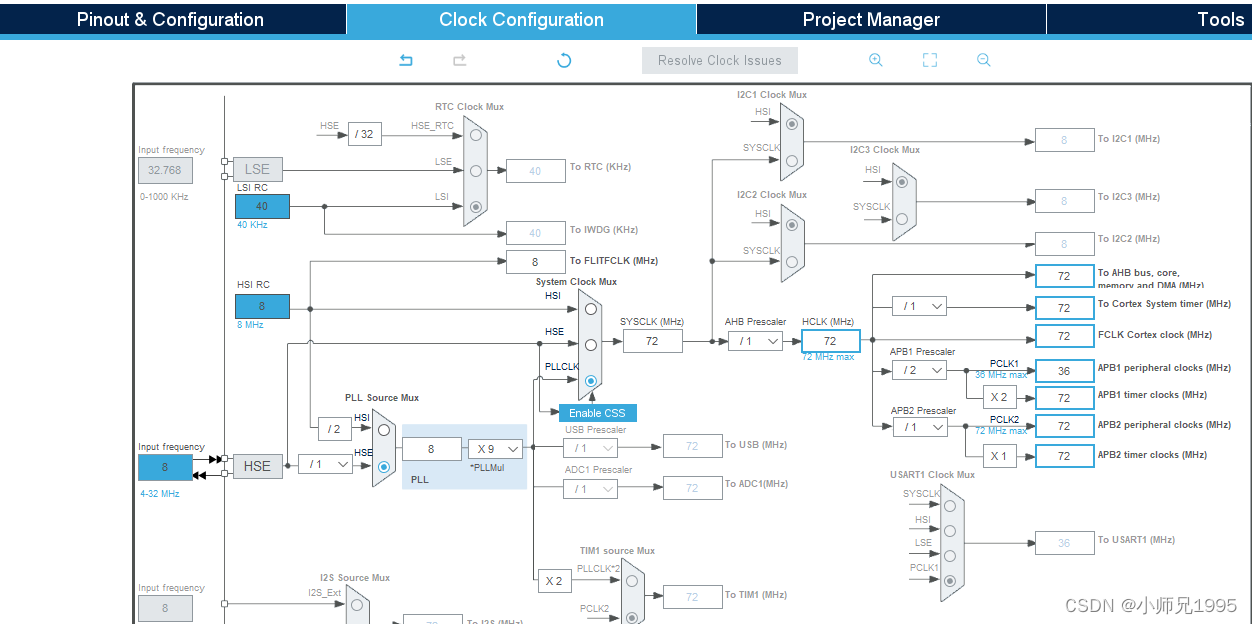
1、RCC设置为外接时钟,72MHz
2、PA8、PA9、PA10、PC10、PC11、PC12设置为推挽输出、无上下拉电阻、高速,初始化状态设为0;PA15、PB3、PB10设置为输入,无上下拉电阻;PB13设置为推挽输出,下拉电阻、高速,初始化状态为0;PC13设置为输入,无上下拉电阻。
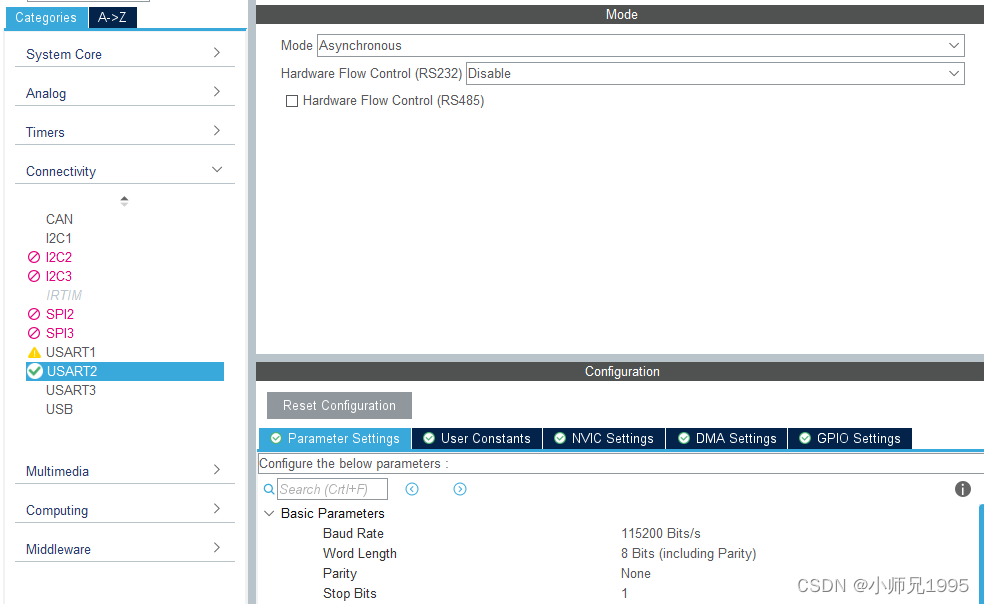
3、使能USART2,异步模式,波特率115200,8位数据位,1位停止位,无奇偶校验位
3、IDE设置为MDK-RAM,在Keil环境中编写应用层程序
1.3.2.应用层开发
在Keil环境中编写应用层程序,实现功能需求。
int main(void) { /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration--------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_USART2_UART_Init(); /* USER CODE BEGIN 2 */ /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ if(Key_Scany(KEY_GPIO_Port,KEY_Pin)==1) { Mode++; if(Mode>3) Mode=0; } switch(Mode) { case 0: BLDC_Stop(); LED_Stop(); break; case 1: BLDC_Driver(1); LED_Driver(); break; case 2: BLDC_Stop(); LED_Stop(); break; case 3: BLDC_Driver(0); LED_Driver(); break; } } /* USER CODE END 3 */ }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
按键扫描函数Key_Scany()
/* USER CODE BEGIN 2 */ uint8_t Key_Scany(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin) { if(HAL_GPIO_ReadPin(GPIOx, GPIO_Pin)==0) { while(HAL_GPIO_ReadPin(GPIOx, GPIO_Pin)==0); return 1; } else return 0; } /* USER CODE END 2 */- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
电机驱动函数BLDC_Driver()
/**************************************************/ /**WR36BL61的换相表,不同于正常直流无刷电机两两导通的 换相表,为尽大可能的利用资源,WR36BL61的换相表为每时刻 三个桥臂均有一个管子开启,厂家提供的换相表如下*******/ /*电机正转换相表**T为1代表桥臂上开下闭,T为0表示桥臂上闭下开*/ /* H1 H2 H3 T1 T2 T3 0 0 1 1 0 1 1 0 1 1 0 0 1 0 0 1 1 0 1 1 0 0 1 0 0 1 0 0 1 1 0 1 1 0 0 1 *************************************************/ /*电机反转换相表****** 0 0 1 0 1 0 1 0 1 0 1 1 1 0 0 0 0 1 1 1 0 1 0 1 0 1 0 1 0 0 0 1 1 1 1 0 **************************************************/ void BLDC_Driver(uint8_t Direction) { static uint8_t Pre_HallState=0; //前一个霍尔状态值 uint8_t HallState; HallState=Get_HallState(); if(Pre_HallState!=HallState) //霍尔状态发生改变,进行电机换相 { HAL_GPIO_WritePin(GPIOC, EN1_Pin, GPIO_PIN_SET); //使能三个桥臂 HAL_GPIO_WritePin(GPIOC, EN2_Pin, GPIO_PIN_SET); HAL_GPIO_WritePin(GPIOC, EN3_Pin, GPIO_PIN_SET); HAL_GPIO_WritePin(GPIOA, IN1_Pin, GPIO_PIN_RESET); //三路桥臂的使能输入设置为0(每路桥臂上闭下开) HAL_GPIO_WritePin(GPIOA, IN2_Pin, GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOA, IN3_Pin, GPIO_PIN_RESET); if(Direction==1) //电机正转 { switch(HallState) //根据霍尔状态值进行电机的换相 { case 1: HAL_GPIO_WritePin(GPIOA, IN1_Pin, GPIO_PIN_SET); HAL_GPIO_WritePin(GPIOA, IN2_Pin, GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOA, IN3_Pin, GPIO_PIN_SET); break; case 5: HAL_GPIO_WritePin(GPIOA, IN1_Pin, GPIO_PIN_SET); HAL_GPIO_WritePin(GPIOA, IN2_Pin, GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOA, IN3_Pin, GPIO_PIN_RESET); break; case 4: HAL_GPIO_WritePin(GPIOA, IN1_Pin, GPIO_PIN_SET); HAL_GPIO_WritePin(GPIOA, IN2_Pin, GPIO_PIN_SET); HAL_GPIO_WritePin(GPIOA, IN3_Pin, GPIO_PIN_RESET); break; case 6: HAL_GPIO_WritePin(GPIOA, IN1_Pin, GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOA, IN2_Pin, GPIO_PIN_SET); HAL_GPIO_WritePin(GPIOA, IN3_Pin, GPIO_PIN_RESET); break; case 2: HAL_GPIO_WritePin(GPIOA, IN1_Pin, GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOA, IN2_Pin, GPIO_PIN_SET); HAL_GPIO_WritePin(GPIOA, IN3_Pin, GPIO_PIN_SET); break; case 3: HAL_GPIO_WritePin(GPIOA, IN1_Pin, GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOA, IN2_Pin, GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOA, IN3_Pin, GPIO_PIN_SET); break; default: break; } } else //电机反转 { switch(HallState) //根据霍尔状态值进行电机的换相 { case 1: HAL_GPIO_WritePin(GPIOA, IN1_Pin, GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOA, IN2_Pin, GPIO_PIN_SET); HAL_GPIO_WritePin(GPIOA, IN3_Pin, GPIO_PIN_RESET); break; case 5: HAL_GPIO_WritePin(GPIOA, IN1_Pin, GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOA, IN2_Pin, GPIO_PIN_SET); HAL_GPIO_WritePin(GPIOA, IN3_Pin, GPIO_PIN_SET); break; case 4: HAL_GPIO_WritePin(GPIOA, IN1_Pin, GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOA, IN2_Pin, GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOA, IN3_Pin, GPIO_PIN_SET); break; case 6: HAL_GPIO_WritePin(GPIOA, IN1_Pin, GPIO_PIN_SET); HAL_GPIO_WritePin(GPIOA, IN2_Pin, GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOA, IN3_Pin, GPIO_PIN_SET); break; case 2: HAL_GPIO_WritePin(GPIOA, IN1_Pin, GPIO_PIN_SET); HAL_GPIO_WritePin(GPIOA, IN2_Pin, GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOA, IN3_Pin, GPIO_PIN_RESET); break; case 3: HAL_GPIO_WritePin(GPIOA, IN1_Pin, GPIO_PIN_SET); HAL_GPIO_WritePin(GPIOA, IN2_Pin, GPIO_PIN_SET); HAL_GPIO_WritePin(GPIOA, IN3_Pin, GPIO_PIN_RESET); break; default: break; } } Pre_HallState=HallState; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
霍尔状态函数Get_HallState()
uint8_t Get_HallState(void) //获取当前霍尔传感器的状态 { uint8_t HallState; //算法为 H1<<2+H2<<1+H3 HallState=HAL_GPIO_ReadPin(H1_GPIO_Port, H1_Pin); HallState<<=1; HallState|=HAL_GPIO_ReadPin(GPIOB, H2_Pin); HallState<<=1; HallState|=HAL_GPIO_ReadPin(GPIOB, H3_Pin); return HallState; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
电机停止函数BLDC_Stop()
void BLDC_Stop(void) { HAL_GPIO_WritePin(GPIOC, EN1_Pin, GPIO_PIN_RESET); //非能三个桥臂 HAL_GPIO_WritePin(GPIOC, EN2_Pin, GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOC, EN3_Pin, GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOA, IN1_Pin, GPIO_PIN_RESET); //三路桥臂的使能输入设置为0(每路桥臂上闭下开) HAL_GPIO_WritePin(GPIOA, IN2_Pin, GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOA, IN3_Pin, GPIO_PIN_RESET); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
1.4.编译下载观察试验现象

总结
主控板STM32F302R8+驱动板X-NUCLEO-IHM07M1+直流无刷电机WR36BL61,采用六步换相法实现电机的正反转驱动,为后续章节的分析奠定基础。
-
相关阅读:
开源监控软件Zabbix5部署实战
电化学氧气传感器寿命、工作原理及应用介绍
VMware找不到父磁盘 父虚拟磁盘在子虚拟磁盘创建之后被修改过。父虚拟磁盘的内容 ID 与子虚拟磁盘中对应的父内容 ID 不匹配
DSPE-PEG-FITC,Fluorescein-PEG-DSPE,修饰性PEG磷脂-聚乙二醇-荧光素
(十八)数据结构-图的应用-最短路径
关于腾讯股票api股票接口的功能分析
Linux-多路转接-select/poll
Docker---Docker-compose 安装部署 zentao 禅道
卧槽,2行代码,让接口性能提升10倍
FFmpeg命令行工具-实用命令
- 原文地址:https://blog.csdn.net/weixin_42650162/article/details/127560641
