-
【camera】摄像头模组简单介绍
摄像头模组
1. 摄像头介绍
摄像头模组的结构大致如下:
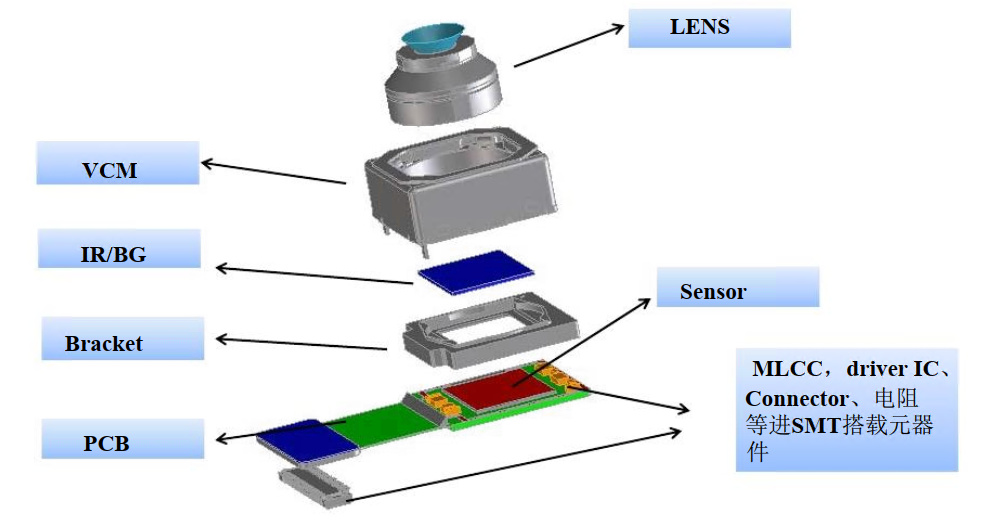
camera模组工作原理:景物通过镜头lens生成光学图像信号投射到图像传感器image sensor表面上,由sensor感光像素点转换为电信号,经过图像传感器的A/D数模转换变为数字图像信号,经过处理在显示屏成像。
结构从上到下是镜头lens、音圈马达VCM、滤光片IR/蓝玻璃BG、支架Bracket、感光芯片sensor、印刷电路板PCB、连接器及SMT搭载元器件等。
- lens主要作用是聚集光线,使通过镜头的光纤额能够聚集到感光芯片上;
- VCM用在AF模组上,用来对焦,即移动镜头至最佳清晰点;
- IR/BG主要用来滤光,IR通过镀膜过滤光线,BG通过吸收光能量的原理过滤光线;
- Bracket用于支撑装载VCM和lens,上表面凹槽贴装IR,内腔容留sensor+电容+driver IC等元件;
- sensor采集光线并转换为电信号输出;
- PCB用来传到sensor的光电信号,降低信号中的noise;
按照自动对焦与否可以分为AF(Auto focus)模组和FF(Fixed focus)模组;按照封装方式可以分为CSP模组和COB模组(另外还有ACF、flipchip等);按照连接方式分为BTB(board to board)、GF(golden finger)、Reflow;其它的还有PDAF模组、OIS模组、双摄、三摄、TOF等。
camera在模组厂的工艺流程大致分为:来料检查、
SMT(在PCB表面贴装Connector/driver-IC等元件)、COB(将sensor/VCM/Lens/bracket等组装到PCB上)、EOL(调焦、校准、烧录等操作)、出货检查。2. Lens介绍
Lens构造如下:
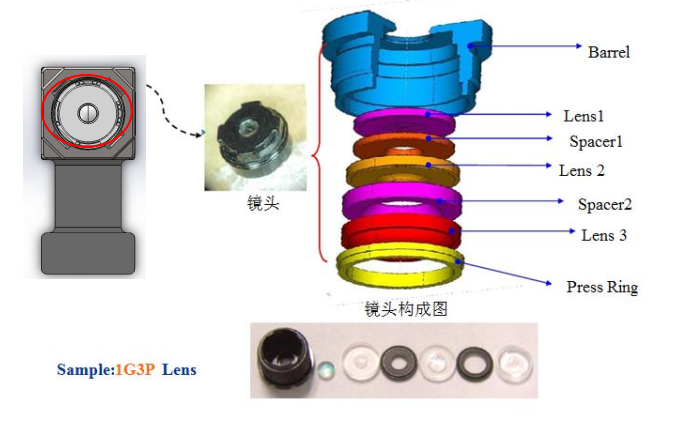
- 镜筒Barrel主要支撑保护lens;整体为遮光材质,避免外部光线的影响;顶部孔径大小决定光学系统入射角;顶部开孔的阶梯状边缘防止反射产生的杂散光进入系统;螺纹方便调焦;
- 镜片组lens1/lens2/lens3…一般lens由几片透镜组成,材质一般分为塑胶透镜和玻璃透镜。透镜越多,消除像差的能力越强,成像效果越好,但相应的成本也越高。镜片组起到将光线会聚到sensor的作用,还可以消除杂散光和各种像差的作用;
- 垫片Spacer支撑lens结构,控制lens间距;
- 压环Press Ring固定lens整体,保护和加强lens结构,同时还有出瞳的作用,控制视场角FOV。
Lens重要的是它的特性,包括物理特性和光学特性。
2.1 Lnes的物理特性
- TTL, Total track length,镜头总高,是Barrel顶端至成像平面的高度。
EFL,Effective focal length,有效焦距,是透镜系统中心到成像焦点的距离,即光学系统中心到成像面距离。- BFL,Back focal length,分为光学和机械后焦。光学后焦是最后一片镜片中心到成像面的距离;机械后焦是barrel底部端面到成像面的距离;
F/NO,光圈数,限制成像光束。F/NO表示进光量系数,数值代表了允许进光量的多少。- F / N O = E F L / 入瞳直径 F/NO=EFL/入瞳直径 F/NO=EFL/入瞳直径,F/NO越小,亮度越亮。
Image circle,成像圆,是光学系统成像的最大区域;设计时,lens image circle 要比sensor影像区对角线单边大0.1mm。CRA,chief ray angle,主光线角度,主光线定义是一个通过入瞳中心的离轴光线,主光线与sensor发现的家教称为镜头主光线角。镜头主光线角须与sensor的主光线角匹配,否则会有色差问题。FOV,镜头的拍照视角范围;景深,Depth of field,焦点前后各有一个容许弥散圆,这两个弥散圆之间的距离称为景深。即在被拍摄主体对焦点前后,其影响仍然有一段清晰范围的,就是景深。- 景深与F/NO、焦距、拍摄距离及弥散圆大小有关:
- 光圈越大,景深越小;光圈越小,景深越大;
- 焦距越长,景深越小;焦距越短,景深越大;
- 距离越远,景深越大;距离越近,景深越小;
- 景深与F/NO、焦距、拍摄距离及弥散圆大小有关:
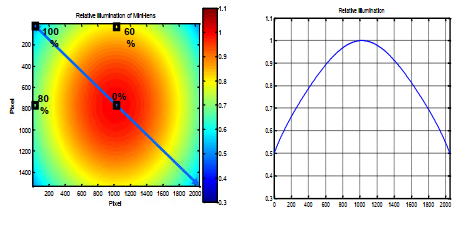
Illumination,相对照度,指物体或被照面上被光源照射所呈现的光亮程度,相对照度为中心照度与周边照度的比值。
2.2 Lens的光学特性
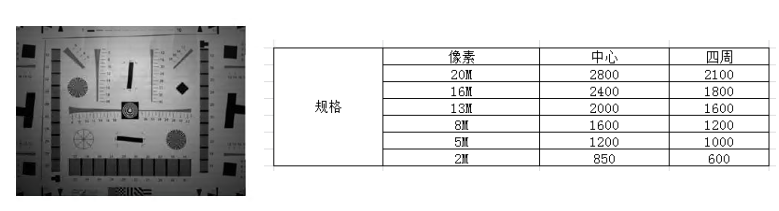
TV-Line,特定分辨率下评价镜头的极限频率,线对宽度和chart高度的比值;
MTF,Modulation Transfer Function,调制传递函数,反应镜头的解析能力。- Modulation = I m a x − I m i n I m a x + I m i n \frac{I_{max} - I_{min}}{I_{max} + I_{min}} Imax+IminImax−Imin;
- 把影响的调制度 M i M_i Mi与景物的调制度 M o M_o Mo的比值称为调制传递函数 M T F = M i / M o MTF = M_i/M_o MTF=Mi/Mo;
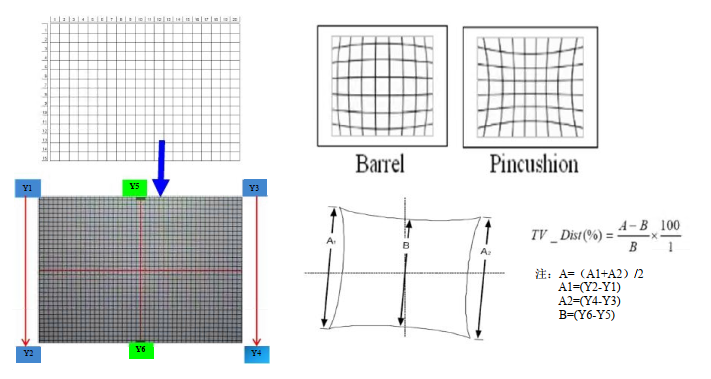
Distortion,畸变,测量镜头边缘之形变程度,畸变分为两种类型,枕形畸变与桶形畸变。
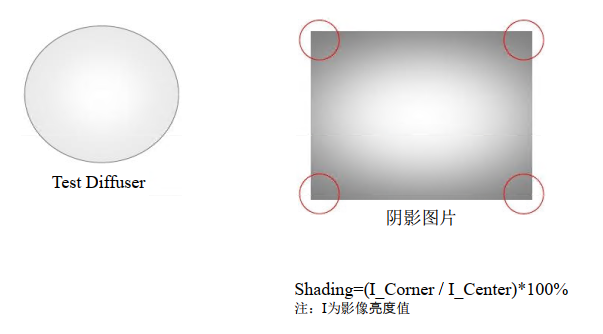
LensShading,阴影,由于镜头的关系,传感器表面各区域获得的光能量存在差异,导致影响四角与中心存在明暗差异。
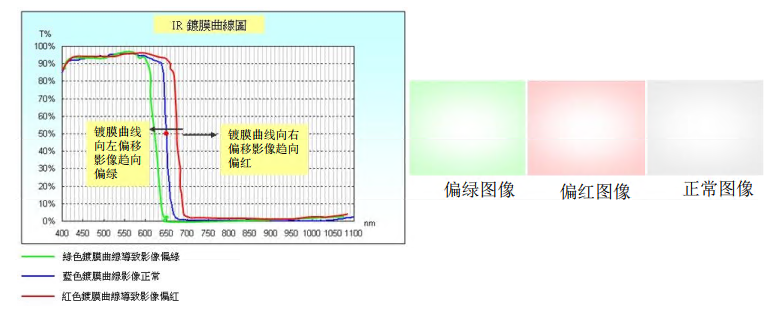
Color Shading,色差,镜头镀膜曲线的关系,传感器获得不同波段的光能量,不同波段代表不同的色彩,直接影响到成像的颜色
Flare,眩光,指镜片的反复折射,镜筒内面的反射或散射等,造成传感器表面获得一些有害的杂散光。Ghost,鬼影,是Flare的一种,在点光源下,一般都会产生鬼影,可以通过多种镀膜减轻鬼影。
3. 音圈马达VCM介绍
VCM,Voice Coil Motor,音圈马达,一般与Lens装配在一起,通过控制Lens上下移动而改变Lens与sensor的距离,从而实现变焦。
VCM的结构:
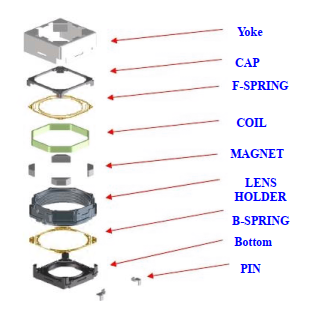
- Spring上下弹簧,通电,加压;
- Coili线圈,手里推动镜座运动,
- Magnet磁铁,产生磁场推动线圈;
- PIN焊接角,VCM正负引脚,连接driverIC驱动;
VCM工作原理:根据法拉第电磁感应定律,通电线圈在磁场中会受到力的作用,其受力方向可以根据左手定了判断,Lens固定在线圈上,线圈带动lens运动。
焦距不变的情况下,该百年像距,使不同距离的物体在sensor表面清晰成像。
4. 滤光片IR介绍
IR FLITER,Infrared Ray Cut-off filter,红外截止滤光片只允许可见光通过,把红外光截止。
人眼感受的可见光波长是380~770nm之间,CMOS sensor识别的光波长范围在350~1000nm,可以同时接受可见光和红外线,会导致生成的图像与人眼所见不一致,因此需要增加IR-Fliter滤掉红外线。
5. 图像传感器sensor介绍
sensor基本结构大致如下:
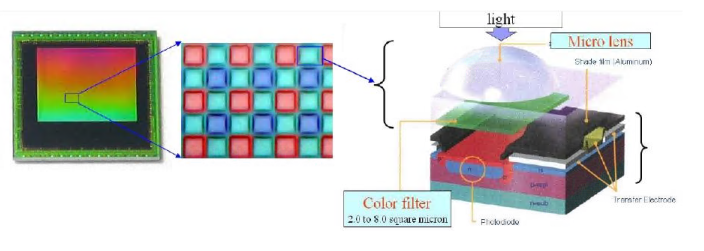
单个感光单元结构,从上到下依次是:micro lens 、滤光片、感光二极管、集成电路。
micro lens聚集光线,滤光片使单基色通过,感光二极管将光信号转换为电信号,集成电路放大机A/D转换等。
sensor的主要参数:
- Resolution,分辨率,sensor总像素数量,比如13M分辨率一般为4208*3120;
- Manufacturer,制造厂商,有SONY,OV,Samsung等;
- Optical szie,sensor影像区大小,对角线长度。
- Pixel Size,单个像素大小;
- CRA,主光线入射角,需要与选择的lens匹配(3%),否则会造成影像串扰、色偏、对比度下降等不良;
- output format,图像输出格式,如raw/yuv等;
- output interfaces,数据输出格式,如4lane mipi/ parallel等;
- fps,传输帧率;
- power supply,工作电压,使用合理范围内的数值供电,防止过低无法启动和画面异常。过高烧毁模组和画面异常;
- active current,工作电流;
- operating temperature,工作温度
6. Golden sample
参考链接:https://blog.csdn.net/agwtpcbox/article/details/56677122
摄像头模组在组装过程中用到不同的单体物料,每个单体物料之间不能保证良好的一致性,需要OTP的手段综合成品模组之间的差异性。
通过将各个单体模组放在标准测试环境中检测,获得并记录各个模组之间的差异信息,实现OTP烧录的功能。但是在终端效果调试的时候,不会对每一颗模组进行单独调试,这时候就需要挑选golden模组。
通常,我们说的golden模组倾向于色彩方面的,即AWB和Shading golden。
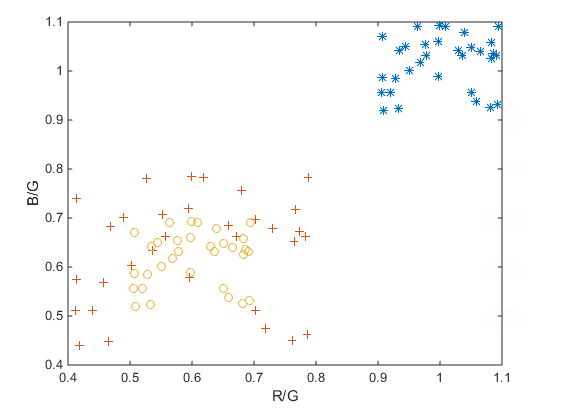
感性上讲,golden模组是所有单体模组中最有代表性的若干模组,在调试时能够很好地覆盖该批次模组的特性,使得针对golden模组调试之后的参数能够适应到其它非golden模组。实际golden模组各通道的RGB数据处在所有模组的几何中心。
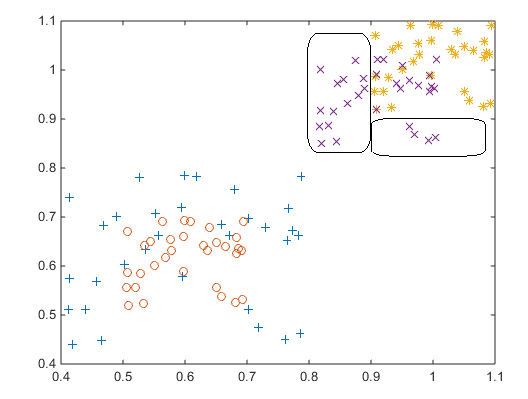
调试时以golden模组进行软件效果调试,如下,在TL48色温下拍摄得到了+所示的一组分布,终端会应用OTP将其收敛至o的分布状态,然后再将其调整所需色温的分布位置即*。
但是当我们使用另一颗模组进行调试时,会出现偏移情况,黑色圈选的部分不能被正确调整到所需的色温分布中,那么这些模组很大概率会出现偏色,所以在挑选过程中需要正确选择居中的golden模组,否则会导致终端进行调试之后出现部分模组成像异常的情况。
golden模组挑选根据客户要求也不同,但差异不大。
通常选择与平均值接近的为典型模组。
-
相关阅读:
Cisco Secure Firewall ASA 9.18.1 (bin, ova, qcow2, SPA, vhd)
一致性hash算法
Java基础之《netty(4)—NIO之Channel》
各种信息论坛
如何实现基于 SaaS 的多租户多因素认证(MFA)?
springcloud和分布式微服务学习笔记
arcgis 网络分析 生成可达范围/等时线
JVM中的STW(Stop The World)
解析正则表达式(一)
Web前端高级课程:深入探索与技能飞跃
- 原文地址:https://blog.csdn.net/sinat_41752325/article/details/127612298