-
360度 EC11 旋转编码器模块 数字脉冲电位器
一、产品简介
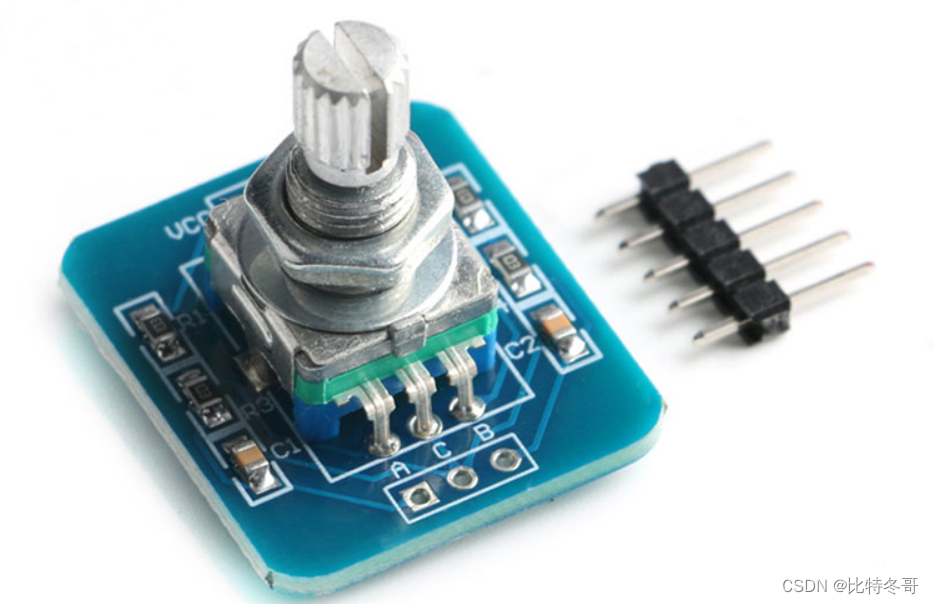
EC11旋转编码器广泛用于车载DVD,车载导航,汽车影音上常被人称为车载编码器。编码器主要用于频率调节,高度调节,温度调节及音量调节的参数控制。注意编码器避免储藏于高温潮湿及腐蚀的场所,拆包装后未使用完的剩余产品请在防潮防毒的环境下保存。产品特点:
-
- 额定电压:DC 5V
-
- 各相导线AB相:0.5mA(Max 5mA,Min 0.5mA)
-
- 公共导线C: 1 mA(Max 10mA,Min 0.5mA)
-
- 使用温度范围: -30℃~+80°c
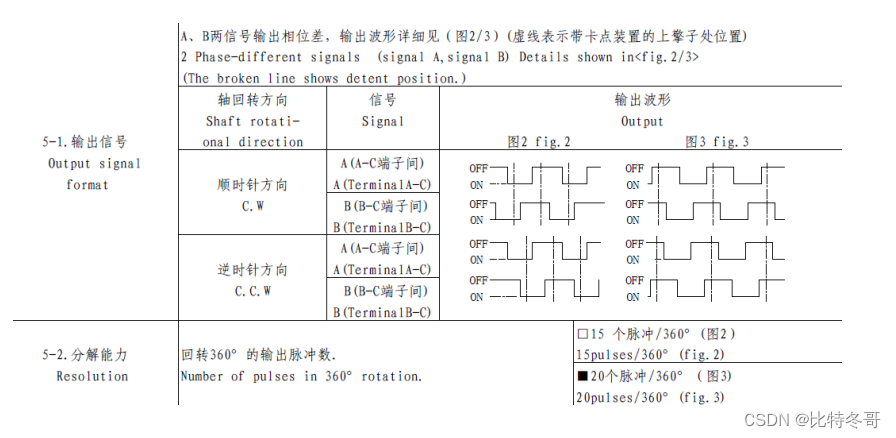
输出信号:
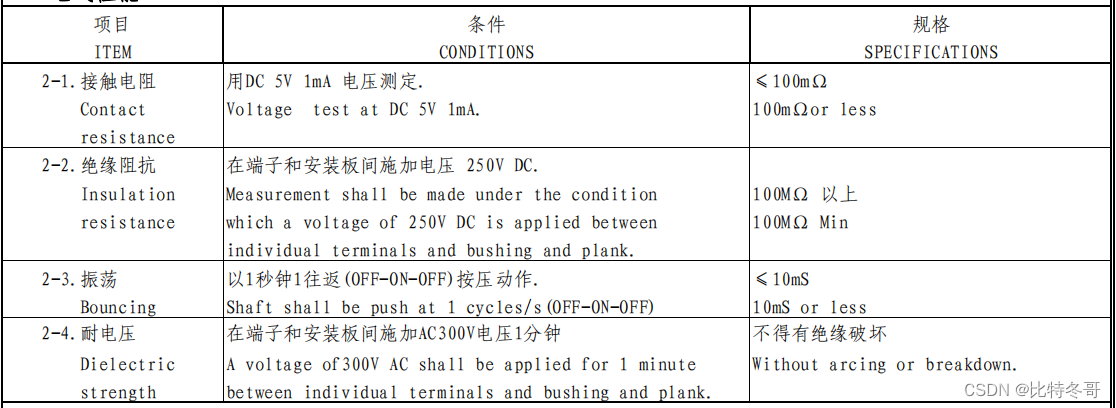
电气性能:
接口说明:

二、原理分析
旋转编码器是一种机电装置,可将轴的角运动,转换为A/B两相相位偏差90°的脉冲信号,其中C是A/B信号的参考地
-
根据A/B信号的相位关系可以获取正反转方向。
-
通过脉冲的计数可以获取旋转的步进数量。
-
根据脉冲在单位时间内的计数可以获取角速度。
-
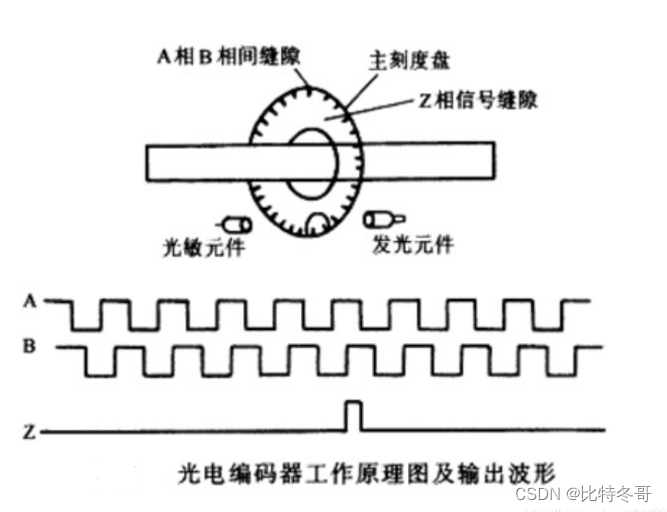
工作原理: 旋转轴带动两组同轴栅格转盘,栅格转盘间存在一定的角度偏差,旋转的栅格会对发光二极管发出的光信号进行间断遮挡,从而使光敏二极管产生高低电平变化。因为两组栅格转盘存在一定的角度偏差,所以会产生两组相位90°偏差的A/B相信号。

A、B两相都输出方波时:- 顺时针方向旋转,A相超前B 相90度;
- 逆时针方向旋转,B相超前A 相90度;

三、程序设计
本篇设计为向右旋转编码器每产生一个脉冲,计数器+1,向左旋转每产生一个脉冲,计数器-1,并通过oled将计数值显示在屏幕上。
1. 引脚初始化
VCC和GND不必多说,首先对A,B相进行引脚初始化,这里我将A、B相分别接上PB0和PB1RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure);- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
2. 开启外部中断
将PB0和PB1设计为中断源,且为下降沿触发GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource0); GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource1); EXTI_InitTypeDef EXTI_InitStructure; EXTI_InitStructure.EXTI_Line = EXTI_Line0 | EXTI_Line1; EXTI_InitStructure.EXTI_LineCmd = ENABLE; EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; EXTI_Init(&EXTI_InitStructure);- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
3. 中断配置
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); NVIC_InitTypeDef NVIC_InitStructure; NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; NVIC_Init(&NVIC_InitStructure); NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; NVIC_Init(&NVIC_InitStructure);- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
4. 中断函数
int16_t Encoder_Get(void) { int16_t Temp; Temp = Encoder_Count; Encoder_Count = 0; return Temp; } void EXTI0_IRQHandler(void) { if (EXTI_GetITStatus(EXTI_Line0) == SET) { /*如果出现数据乱跳的现象,可解除以下注释,再次判断引脚电平,以避免抖动*/ // if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0) // { if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0) { Encoder_Count --; } // } EXTI_ClearITPendingBit(EXTI_Line0); } } void EXTI1_IRQHandler(void) { if (EXTI_GetITStatus(EXTI_Line1) == SET) { /*如果出现数据乱跳的现象,可解除以下注释,再次判断引脚电平,以避免抖动*/ // if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0) // { if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0) { Encoder_Count ++; } // } EXTI_ClearITPendingBit(EXTI_Line1); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
5. main函数
int16_t Num; int main(void) { OLED_Init(); Encoder_Init(); OLED_ShowString(1, 1, "Num:"); while (1) { Num += Encoder_Get(); OLED_ShowSignedNum(1, 5, Num, 5); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
四、程序源码
有需要者 请留言评论区或私信
-
-
相关阅读:
软件开发通识之二:如何从零开始学编程
[答疑]校长出轨主任流程的业务建模
iOS - 多线程-atomic
SpringCloud 核心组件Feign【远程调用&自定义配置】
java特种兵读书笔记(4-4)——java通信之tomcat对IO请求的处理
Three开关门
【Linux】初识进程地址空间
ai剪辑矩阵系统源码+无人直播系统源码技术开发
IDEA 集成 Docker 插件一键部署 SpringBoot 应用
log4j2原理分析及漏洞复现CVE-2021-44228
- 原文地址:https://blog.csdn.net/Dustinthewine/article/details/127547623
