-
如何在 RT-Thread Smart 下使用 NimBLE 蓝牙协议栈
文中蓝字部分,请点击阅读原文查看。
本文主要介绍 NimBLE 软件包的在 RT-Thread Smart 下的使用
目前官方使用 ART-Pi-Smart 评估板运行 RT-Thread Smart,此工程也是跑在 ART-Pi-Smart 开发板上。
需要使用 ART-Pi-Smart 搭配 外部蓝牙 Controller 芯片使用。
需要配置好 rt-thread smart 在 Windows 下的开发环境。
准备 RT-Thread Smart 开发环境
主要按照 ART-Pi-Smart 官方用户手册进行开发环境的搭建:
1、通过ART-Pi-Smart SDK 仓库 (Gitee)下载最新的 ART-Pi Smart SDK 软件包。
2、通过用户手册中相关章节下载一下 Windows 版本的 arm-linux-musleabi 工具链,将解压出来的 arm-linux-musleabi_for_i686-w64-mingw32 文件夹整个拷贝到 ./tools/gnu_gcc/ 下面,如图:

3、装一下 env 开发工具,这个不多说。
4、加载工具链,在 ART-Pi-Smart SDK 根目录下打开 env 工具,依次运行命令:
smart-env.bat - 设置当前环境变量
set RTT - 查看环境变量信息,检查交叉编译器路径是否成功添加
arm-linux-musleabi-gcc -v - 检查交叉编译器是否生效
结果应该显示如下:
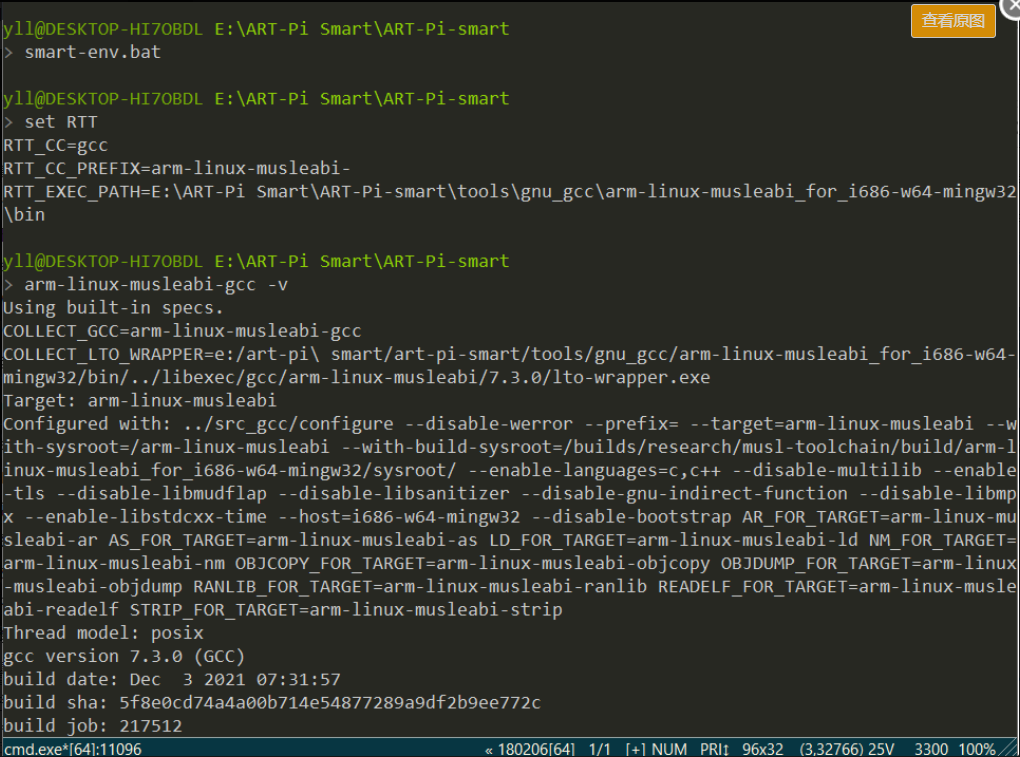
注意:每一次重新打开 env 工具都需要通过运行 ART-Pi-Smart SDK 根目录下的 smart-env.bat 来设置当前环境变量,添加交叉编译器路径,否则编译会出错。
5、依据 USB方式启动 rt-smart 内核 章节,下载 100ask_imx6ull 烧写工具(由百问网提供)。
配置相关串口
-
相关阅读:
CPP 核心编程6-多态
网络安全(黑客)自学
如何让背景色在任何设备宽高都能填充整个屏幕
【SpringBoot项目】SpringBoot+MyBatis+MySQL电脑商城
小迪安全36WEB 攻防-通用漏洞&XSS 跨站&MXSS&UXSS&FlashXSS&PDFXSS
常用的二十种设计模式(上)-C++
【C++代码】二叉树的最大深度,二叉树的最小深度,完全二叉树的节点个数--代码随想录
Linux运维10:scp命令详解
Graalvm-21 Windows初体验
领跑两轮电动车江湖,谁是“关键先生”?
- 原文地址:https://blog.csdn.net/rtthreadiotos/article/details/127564063