-
卡尔曼滤波实例——预测橘子的轨迹
目录
(二)获取到图像中的包围橘子对应的白色图形的最小矩形框的信息
流程
step1:获取橘子的检测框
step2:求取橘子的质心
step3:将质心送入卡尔曼滤波器,获取到预测的下一次橘子的质心位置
一、采用轮廓的方式检测橘子位置
步骤:
- 采用OpenCV滚动条来确定阈值
- 设置高低阈值,利用inRange函数,将图像转为二值图,为方便之后的轮廓提取
- 使用findContours函数,提取二值图中所有的轮廓,并采用cv2.RETR_TREE,建立轮廓等级树
- 等级树初始是升序,我们要获取最大的那个轮廓,那么就进行sort降序排序
- 最后,第一个轮廓的最小外边框的参数就可以用boundingRect获取到了
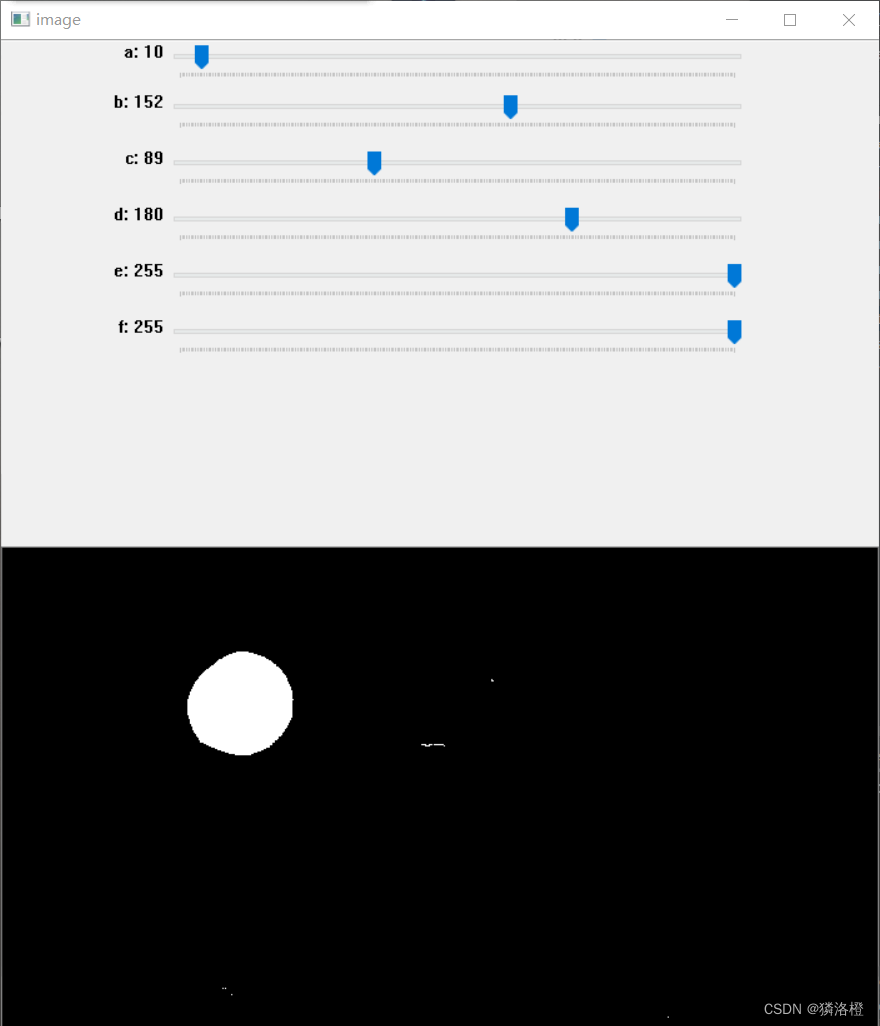
(一)滚动条获取阈值
视频中截图的一张带有橘子的图

代码
- import cv2
- import numpy as np
- def nothing(x):
- pass
- cv2.namedWindow('image')
- cv2.createTrackbar('a','image',0,255,nothing)
- cv2.createTrackbar('b','image',0,255,nothing)
- cv2.createTrackbar('c','image',0,255,nothing)
- cv2.createTrackbar('d','image',0,255,nothing)
- cv2.createTrackbar('e','image',0,255,nothing)
- cv2.createTrackbar('f','image',0,255,nothing)
- frame = cv2.imread('orange.jpg')
- frame = cv2.resize(frame,(700,400))
- while True:
- a = cv2.getTrackbarPos('a', 'image')
- b = cv2.getTrackbarPos('b', 'image')
- c = cv2.getTrackbarPos('c', 'image')
- d = cv2.getTrackbarPos('d', 'image')
- e = cv2.getTrackbarPos('e', 'image')
- f = cv2.getTrackbarPos('f', 'image')
- hsv_img = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
- low_orange = np.array([a, b, c])
- high_orange = np.array([d, e, f])
- mask = cv2.inRange(hsv_img, low_orange, high_orange)
- cv2.imshow('image',mask)
- k = cv2.waitKey(1)&0xff
- if k==27:
- break
(二)获取到图像中的包围橘子对应的白色图形的最小矩形框的信息
检测橘子轮廓最小外边框代码
- import cv2
- import numpy as np
- class OrangeDetector:
- def __init__(self):
- self.low_orange = np.array([10, 152, 89])
- self.high_orange = np.array([180, 255, 255])
- def detect(self, frame):
- hsv_img = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
- mask = cv2.inRange(hsv_img, self.low_orange, self.high_orange)
- contours, _ = cv2.findContours(mask, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
- contours = sorted(contours, key=lambda x: cv2.contourArea(x), reverse=True)
- box = (0, 0, 0, 0)
- for cnt in contours:
- (x, y, w, h) = cv2.boundingRect(cnt)
- box = (x, y, x + w, y + h)
- break
- return box
二、获取橘子检测框的质心
- od = OrangeDetector()
- orange_bbox = od.detect(frame)
- x, y, x2, y2 = orange_bbox
- cx = int((x + x2) / 2)
- cy = int((y + y2) / 2)
三、将质心送入卡尔曼滤波器,获取下一次的质心位置
predicted = kf.predict(cx, cy)四、绘图质心中心的圆圈,让效果直观显示出来

卡尔曼滤波预测代码
- import cv2
- from orange_detector import OrangeDetector
- from kalmanfilter import KalmanFilter
- cap = cv2.VideoCapture("orange.mp4")
- od = OrangeDetector()
- kf = KalmanFilter()
- while True:
- ret, frame = cap.read()
- if ret is False:
- break
- orange_bbox = od.detect(frame)
- x, y, x2, y2 = orange_bbox
- cx = int((x + x2) / 2)
- cy = int((y + y2) / 2)
- predicted = kf.predict(cx, cy)
- cv2.circle(frame, (cx, cy), 20, (0, 0, 255), 4)
- cv2.circle(frame, (predicted[0], predicted[1]), 20, (255, 0, 0), 4)
- cv2.imshow("Frame", frame)
- key = cv2.waitKey(10)
- if key == 27:
- break
-
相关阅读:
c++仿函数
Express:CORS 跨域资源共享
Linux C应用编程-4-信号
Jenkins(6)流水线(pipeline)、Jenkinsfile设置、多分支构建及简单总结
如何快速清理c盘缓存垃圾(最简单的c盘清理方法)
腾讯云健康码+行程码OCR文字识别
为什么拖拽式表单设计器受欢迎?
甲方测试如何做好外包项目的测试验收?
Reading Note(10)——AutoBridge
OpenCV学习(六)——图像算术运算(加法、融合与按位运算)
- 原文地址:https://blog.csdn.net/weixin_54627824/article/details/127472819
