-
蓝桥杯单片机第六届省赛题详细讲解(简易温度采集和控制装置)
演示效果
题目讲解
首先还是从整个赛题的程序框图开始看起,如图。
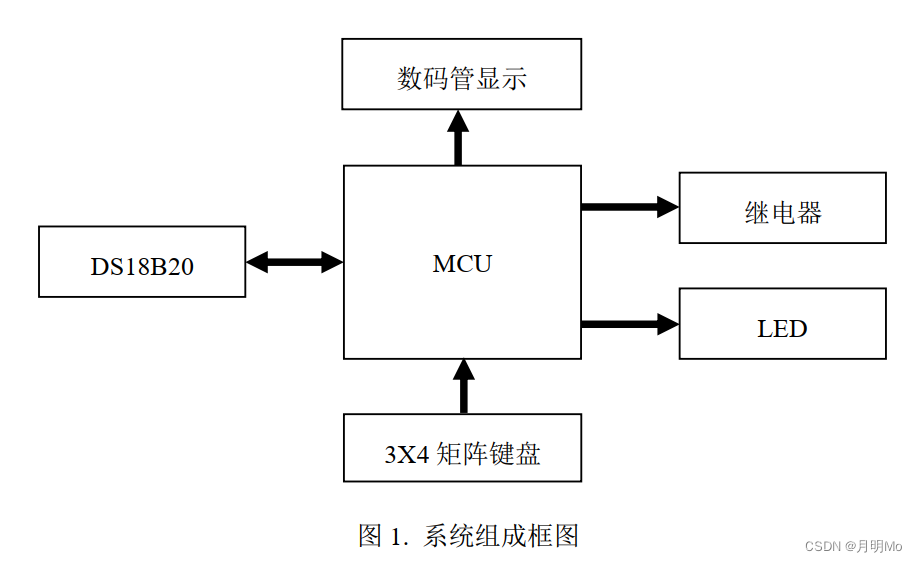
再接着往下看题之前,我们首先要把程序框图里面的DS18B20,3×4矩阵按键,数码管显示先调试好。
然后接着往下看:
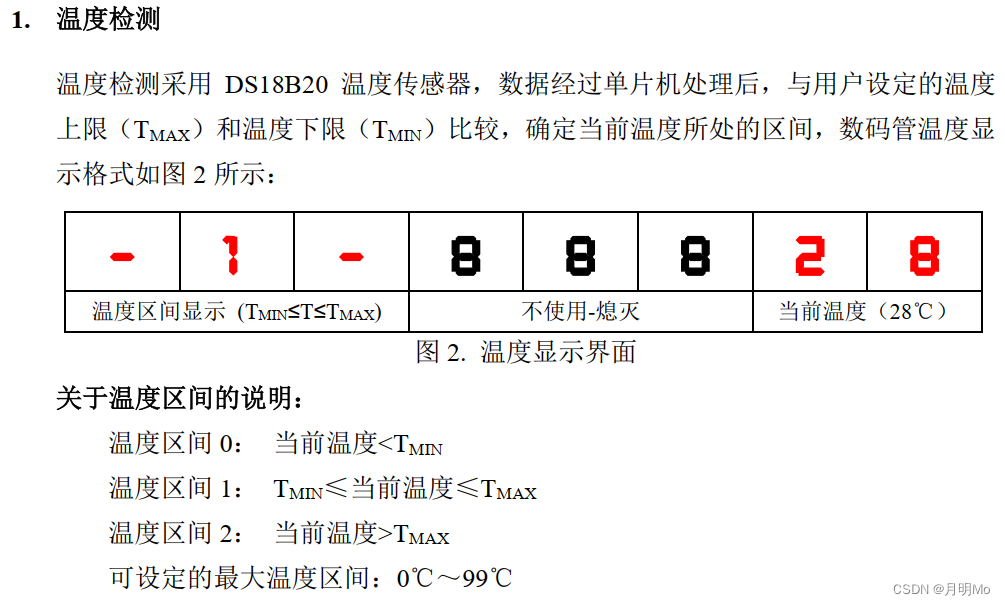
首先定义变量控制数码管显示,还有温度区间:uchar SMG_mode=0,temp=0; //定义数码管模式和温度 uchar Tmax=99,Tmin=0; //定义最高和最低温度阈值- 1
- 2
然后按照图把数码管显示出来:
void main(void) { init(); //初始开发板 while(1) { temp=rd_temperature(); //获取温度 if(SMG_mode==0) { if(temp<Tmin) SMG[1]=0; //小于最小温度为区间0 else if(temp<=Tmax) SMG[1]=1; //大于最小温度小于最大温度为区间1 else SMG[1]=2; //大于最大温度为区间2 SMG[0]=21;SMG[2]=21; SMG[3]=20;SMG[4]=20;SMG[5]=20; SMG[6]=temp/10;SMG[7]=temp%10; } SMG_output(); Jkey_scan(); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
做完这一步记得进行调试一下,然后进行下一步!!!
如图:
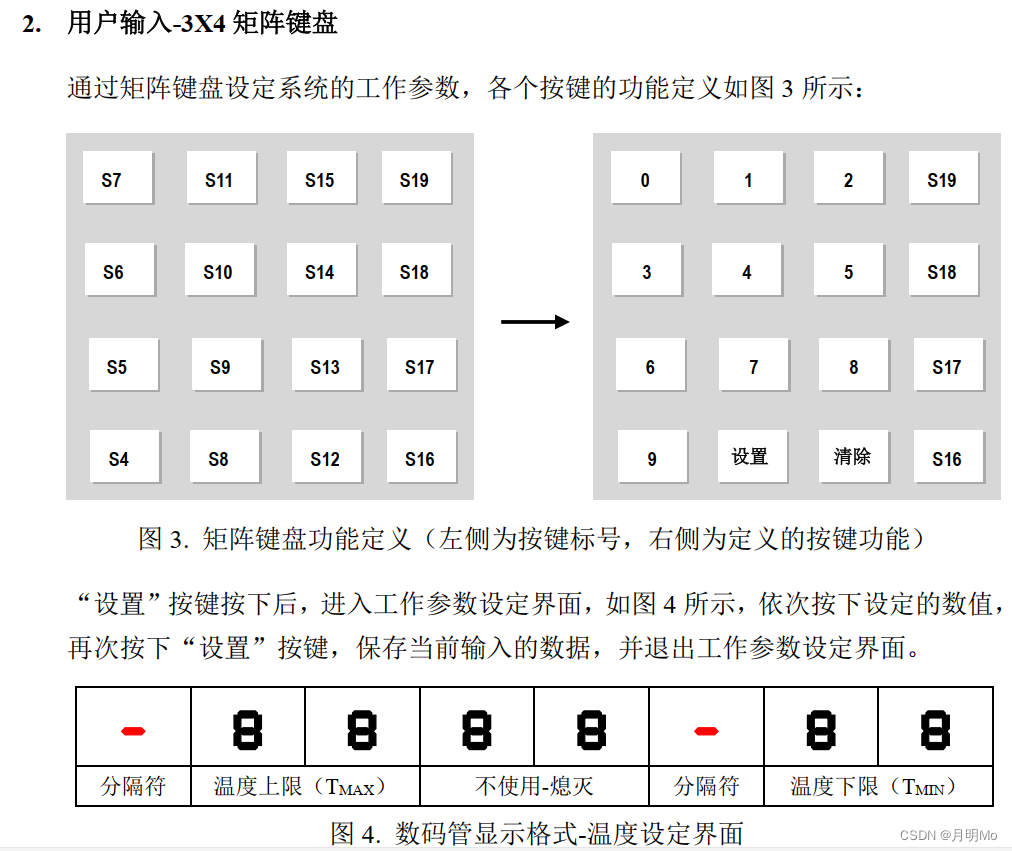
这是一个矩阵按键的输入程序,按下S8进入输入模式,所以要重新设置一个数码管模式,然后再进行输入和清除相应的功能。
写输入程序的时候要理解,输入就是把熄灭的地方赋值,清除就是把显示的地方熄灭,然后在把这句话转化为逻辑来写程序。
写入函数:void Input_num(uchar num) { //把熄灭的地方给显示,从第一个数码管开始 if(SMG[1]==20) { SMG[1]=num; } else if(SMG[2]==20) { SMG[2]=num; } else if(SMG[6]==20) { SMG[6]=num; } else if(SMG[7]==20) { SMG[7]=num; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
删除函数:
void Delect_num(void) { //把不熄灭的地方给熄灭,从最后一个数码管开始 if(SMG[7]!=20) { SMG[7]=20; } else if(SMG[6]!=20) { SMG[6]=20; } else if(SMG[2]!=20) { SMG[2]=20; } else if(SMG[1]!=20) { SMG[1]=20; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
按键程序:
void Jkey_scan(void) { unsigned char i,key; for(i=0x80;i>8;i >>=1) { if(i==0x80){P44=0;P42=1;P3=(~i);} else if(i==0x40){P44=1;P42=0;P3=(~i);} else {P44=1;P42=1;P3=(~i);} if(i==0x80){key=P3;key&=0x7f;} else if(i==0x40){key=P3;key&=0xbf;} else {key=P3;} if((key&0x0f)!=0x0f) { delay5ms(); if((key&0x0f)!=0x0f) { switch(key) { case 0x7e:Input_num(0);break; //输入0 case 0x7d:Input_num(3);break; //输入3 case 0x7b:Input_num(6);break; //输入6 case 0x77:Input_num(9);break; //输入9 case 0xbe:Input_num(1);break; //输入1 case 0xbd:Input_num(4);break; //输入4 case 0xbb:Input_num(7);break; //输入7 case 0xb7: if(SMG_mode==0) { SMG_mode=1; SMG[1]=SMG[2]=SMG[6]=SMG[7]=20; }//先转换数码管显示,再把要输入的熄灭 else { Tmax=SMG[1]*10+SMG[2]; //再次按下,把输入的值给Tmax,Tmin Tmin=SMG[6]*10+SMG[7]; if((SMG[1]==20)||(SMG[2]==20)||(SMG[6]==20)||(SMG[7]==20)||(Tmax<Tmin)) { //当数码管由一个熄灭(每设置)或者tmax- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
然后再看最后两个要求:
这里就需要使用定时器了,我们设置一个1ms的定时器;void Timer0Init(void) //1毫秒@11.0592MHz { AUXR |= 0x80; //定时器时钟1T模式 TMOD &= 0xF0; //设置定时器模式 TL0 = 0xCD; //设置定时初值 TH0 = 0xD4; //设置定时初值 TF0 = 0; //清除TF0标志 TR0 = 1; //定时器0开始计时 EA=1;ET0=1; //打开定时器中断 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
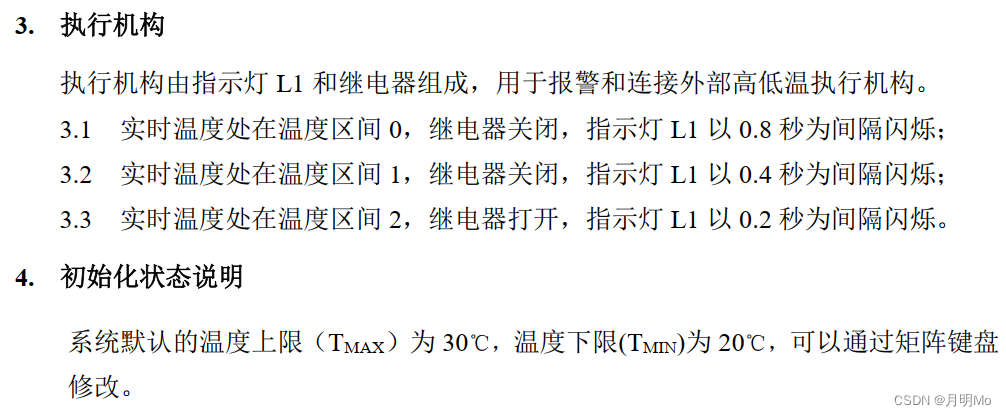
然后在中断服务函数进行点亮LED和继电器
uint t=0; //计时 bit state=0; //led状态值 uint ledtime=0; //定义间隔时间 void time0() interrupt 1 { t++; if(SMG_mode==0) { if(t>=ledtime) //大于等于指定时间 { t=0; //计时清零 if(state==0){state=1;LED&=0XFE;} //LED1亮 else {state=0;LED|=0X01;} //灭 } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
然后配合主函数进行判断:
if(SMG_mode==0) { //温度判断和继电器控制 if(temp<Tmin) {SMG[1]=0;ledtime=800;P2=0XA0;P0=0X00;} //小于最小温度为区间0 //设置时间为800 else if(temp<=Tmax) {SMG[1]=1;ledtime=400;P2=0XA0;P0=0X00;} //大于最小温度小于最大温度为区间1,时间400 else {SMG[1]=2;ledtime=200;P2=0XA0;P0=0X10;} //大于最大温度为区间2 时间200 SMG[0]=21;SMG[2]=21; SMG[3]=20;SMG[4]=20;SMG[5]=20; SMG[6]=temp/10;SMG[7]=temp%10; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
最后修改Tmax和Tmin的值
uchar Tmax=30,Tmin=20;
这样就完成了。完整程序
main.c
#include#include "intrins.h" #include "onewire.h" #define uchar unsigned char #define uint unsigned int void SMG_output(void); void init(void); void Delay1ms(void); void delay5ms(void); void Jkey_scan(void); void Input_num(uchar num); //写入 void Delect_num(void); //删除 void Timer0Init(void); uchar tab[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,\ 0x40,0x79,0x24,0x30,0x19,0x12,0x02,0x78,0x00,0x10,0xff,0xbf}; uchar SMG[8]={20,20,20,20,20,20,20,20};//初始显示10,全息数码管 uchar SMG_mode=0,temp=0; //定义数码管模式和温度 uchar Tmax=30,Tmin=20; //定义最高和最低温度阈值 uchar LED=0xff; //led控制变量 uint t=0; //计时 bit state=0; //led状态值 uint ledtime=0; //定义间隔时间 void main(void) { init(); //初始开发板 Timer0Init(); //初始化定时器 while(1) { temp=rd_temperature(); //获取温度 if(SMG_mode==0) { //温度判断和继电器控制 if(temp<Tmin) {SMG[1]=0;ledtime=800;P2=0XA0;P0=0X00;} //小于最小温度为区间0 //设置时间为800 else if(temp<=Tmax) {SMG[1]=1;ledtime=400;P2=0XA0;P0=0X00;} //大于最小温度小于最大温度为区间1,时间400 else {SMG[1]=2;ledtime=200;P2=0XA0;P0=0X10;} //大于最大温度为区间2 时间200 SMG[0]=21;SMG[2]=21; SMG[3]=20;SMG[4]=20;SMG[5]=20; SMG[6]=temp/10;SMG[7]=temp%10; } else if(SMG_mode==1) //设置模式 { //只显示不需要要输入的 SMG[0]=21; SMG[3]=20;SMG[4]=20;SMG[5]=21; } P2=0X80;P0=LED; //led显示 SMG_output(); Jkey_scan(); } } void time0() interrupt 1 { t++; if(SMG_mode==0) //模式0才生效 { if(t>=ledtime) //大于等于指定时间 { t=0; //计时清零 if(state==0){state=1;LED&=0XFE;} //LED1亮 else {state=0;LED|=0X01;} //灭 } } } void Input_num(uchar num) { //把熄灭的地方给显示,从第一个数码管开始 if(SMG[1]==20) { SMG[1]=num; } else if(SMG[2]==20) { SMG[2]=num; } else if(SMG[6]==20) { SMG[6]=num; } else if(SMG[7]==20) { SMG[7]=num; } } void Delect_num(void) { //把不熄灭的地方给熄灭,从最后一个数码管开始 if(SMG[7]!=20) { SMG[7]=20; } else if(SMG[6]!=20) { SMG[6]=20; } else if(SMG[2]!=20) { SMG[2]=20; } else if(SMG[1]!=20) { SMG[1]=20; } } void Jkey_scan(void) { unsigned char i,key; for(i=0x80;i>8;i >>=1) { if(i==0x80){P44=0;P42=1;P3=(~i);} else if(i==0x40){P44=1;P42=0;P3=(~i);} else {P44=1;P42=1;P3=(~i);} if(i==0x80){key=P3;key&=0x7f;} else if(i==0x40){key=P3;key&=0xbf;} else {key=P3;} if((key&0x0f)!=0x0f) { delay5ms(); if((key&0x0f)!=0x0f) { switch(key) { case 0x7e:Input_num(0);break; //输入0 case 0x7d:Input_num(3);break; //输入3 case 0x7b:Input_num(6);break; //输入6 case 0x77:Input_num(9);break; //输入9 case 0xbe:Input_num(1);break; //输入1 case 0xbd:Input_num(4);break; //输入4 case 0xbb:Input_num(7);break; //输入7 case 0xb7: if(SMG_mode==0) { SMG_mode=1; SMG[1]=SMG[2]=SMG[6]=SMG[7]=20; }//先转换数码管显示,再把要输入的熄灭 else { Tmax=SMG[1]*10+SMG[2]; //再次按下,把输入的值给Tmax,Tmin Tmin=SMG[6]*10+SMG[7]; if((SMG[1]==20)||(SMG[2]==20)||(SMG[6]==20)||(SMG[7]==20)||(Tmax<Tmin)) { //当数码管由一个熄灭(每设置)或者tmax - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
onewire.h
#ifndef __ONEWIRE_H #define __ONEWIRE_H #include "stc15f2k60s2.h" sbit DQ = P1^4; #define u8 unsigned char #define u32 unsigned int unsigned char rd_temperature(void); //; ; void Delay_OneWire(unsigned int t); unsigned char Read_DS18B20(void); bit init_ds18b20(void); void Write_DS18B20(unsigned char dat); #endif- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
onewire.c
#include "onewire.h" unsigned char rd_temperature(void) { u8 de,gao; init_ds18b20(); Write_DS18B20(0xcc); Write_DS18B20(0x44); init_ds18b20(); Write_DS18B20(0xcc); Write_DS18B20(0xbe); de=Read_DS18B20(); gao=Read_DS18B20(); return((de >>4)|(gao<<4)); } // void Delay_OneWire(unsigned int t) { t *=8; while(t--); } // void Write_DS18B20(unsigned char dat) { unsigned char i; for(i=0;i<8;i++) { DQ = 0; DQ = dat&0x01; Delay_OneWire(5); DQ = 1; dat >>= 1; } Delay_OneWire(5); } // unsigned char Read_DS18B20(void) { unsigned char i; unsigned char dat; for(i=0;i<8;i++) { DQ = 0; dat >>= 1; DQ = 1; if(DQ) { dat |= 0x80; } Delay_OneWire(5); } return dat; } // bit init_ds18b20(void) { bit initflag = 0; DQ = 1; Delay_OneWire(12); DQ = 0; Delay_OneWire(80); DQ = 1; Delay_OneWire(10); initflag = DQ; Delay_OneWire(5); return initflag; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
工程文件
-
相关阅读:
一篇文章带你用动态规划解决股票购买时机问题
果脯干货经营小程序商城的效果如何
mac本地搭建ollama
tekton+argocd 部署golang项目
http服务网络请求如何确保数据安全(含python示例源码)
查询硬盘序列号、物理地址及对应批处理命令
基于C语言设计符号表
Numpy 逻辑函数和位处理函数
前端学习 Nginx
面试高潮季即将来袭,Android 开发者能否在其中鲤鱼跃龙门?
- 原文地址:https://blog.csdn.net/darlingqx/article/details/127521942