-
F450无人机组装与调试
认识无人机零部件
机架
无人机的机架由四个机臂、两个中心板以及四个脚架组成。

【四个机臂和两个中心板】

【四个脚架】
图片
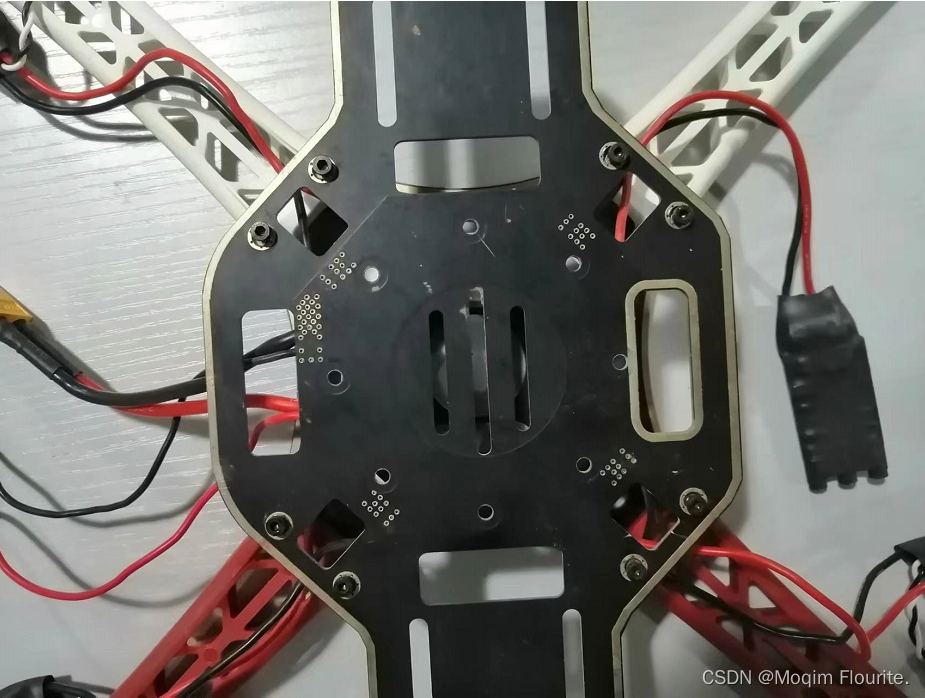
【组装好的机架】
相关资料:多旋翼结构
电机

相关资料:电机电调

相关资料:电调螺旋桨

相关资料:螺旋桨飞控套件(包括飞控、LED信号灯,GPS模块,电源管理模块)

【NAZA-M飞控,LED信号灯,GPS模块】

【电源管理模块 - 正面】
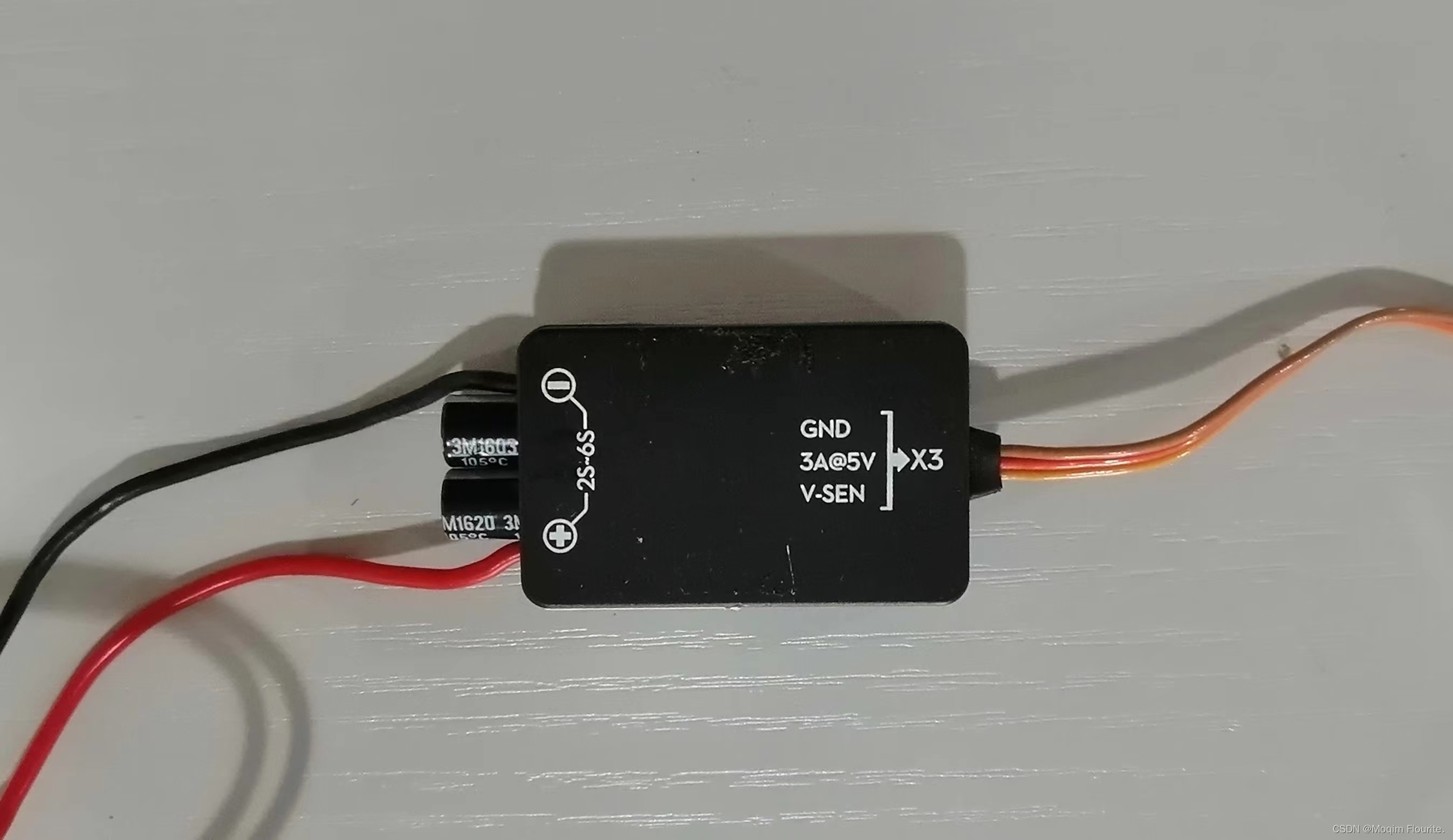
【电源管理模块 - 反面】
相关资料:飞控套件
遥控器及遥控器接收机

【接收机】

【遥控器】
相关资料:遥控器
电池

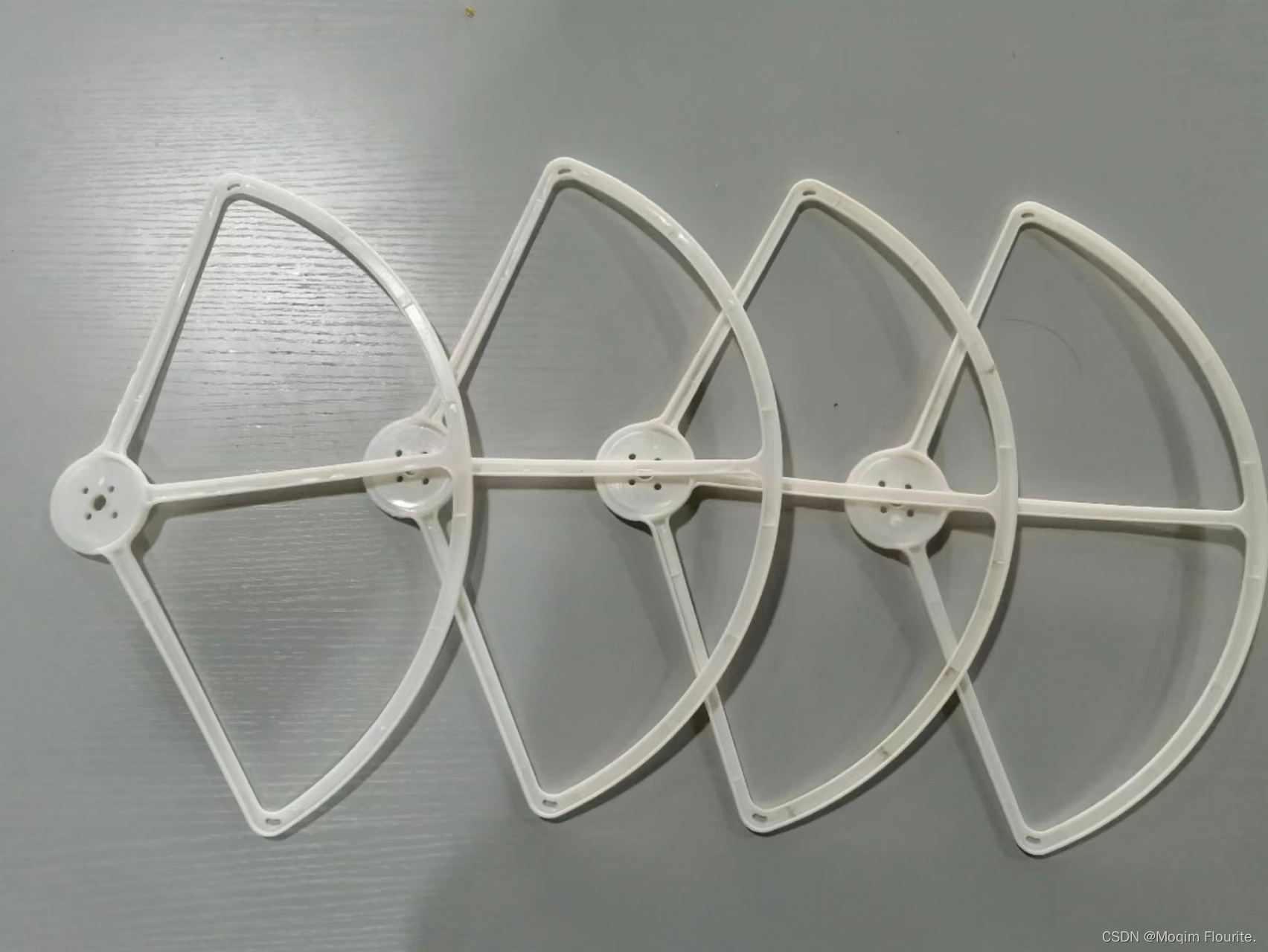
相关资料:电池护桨
确认工具清单
为简化安装流程,我们已事先完成焊接的部分【电调、电源管理模块、下中心板】,以及取消起落架和GPS模块的安装。
剩下工作所需的工具有——
一套机架,四个螺旋桨,四个电机,已焊接好的四个电调和一个电源管理模块,一个飞控,一个LED信号灯,一个接收机,一个电池,五条数据线,四根绑带,一个遥控器(一桌一个),遥控器电池(已装进遥控器),对码线(一桌一个),剪线钳(一桌一个),螺丝刀,螺丝,护桨(有些人没有)。

【工具一览图】
螺丝:黑色小螺丝24个,白色大螺丝16个
螺丝刀:一把(有护桨);两把(无护桨)

【螺丝与螺丝刀】 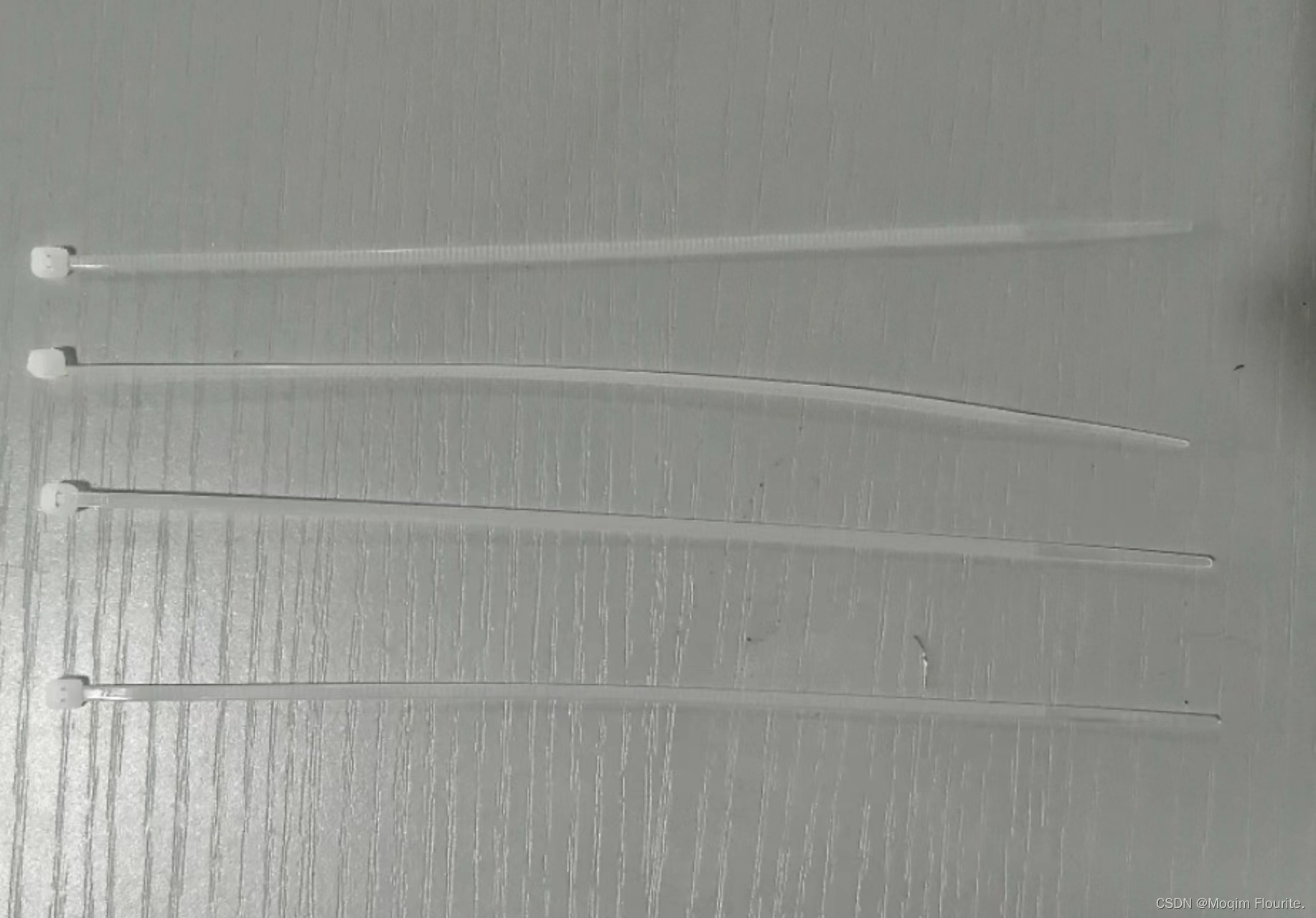
【绑带】 
【遥控器对码线】

【剪线钳】
组装过程
1.组装机架
首先要选择机头方向,我个人一般选择白色机臂的方向为机头,这样飞行的时候更容易看清。
然后用黑色的小螺丝沿中心对称安装。

注意:- 注意机头方向;
- 注意下中心板的突出部分要在中心轴上;
- 注意让电调线从机臂与下中心板的缝隙中抽出;
- 注意把螺丝拧紧;

【让电调线从机臂与下中心板的缝隙中抽出;】

【完成图】 
【细节图】
【细节图】
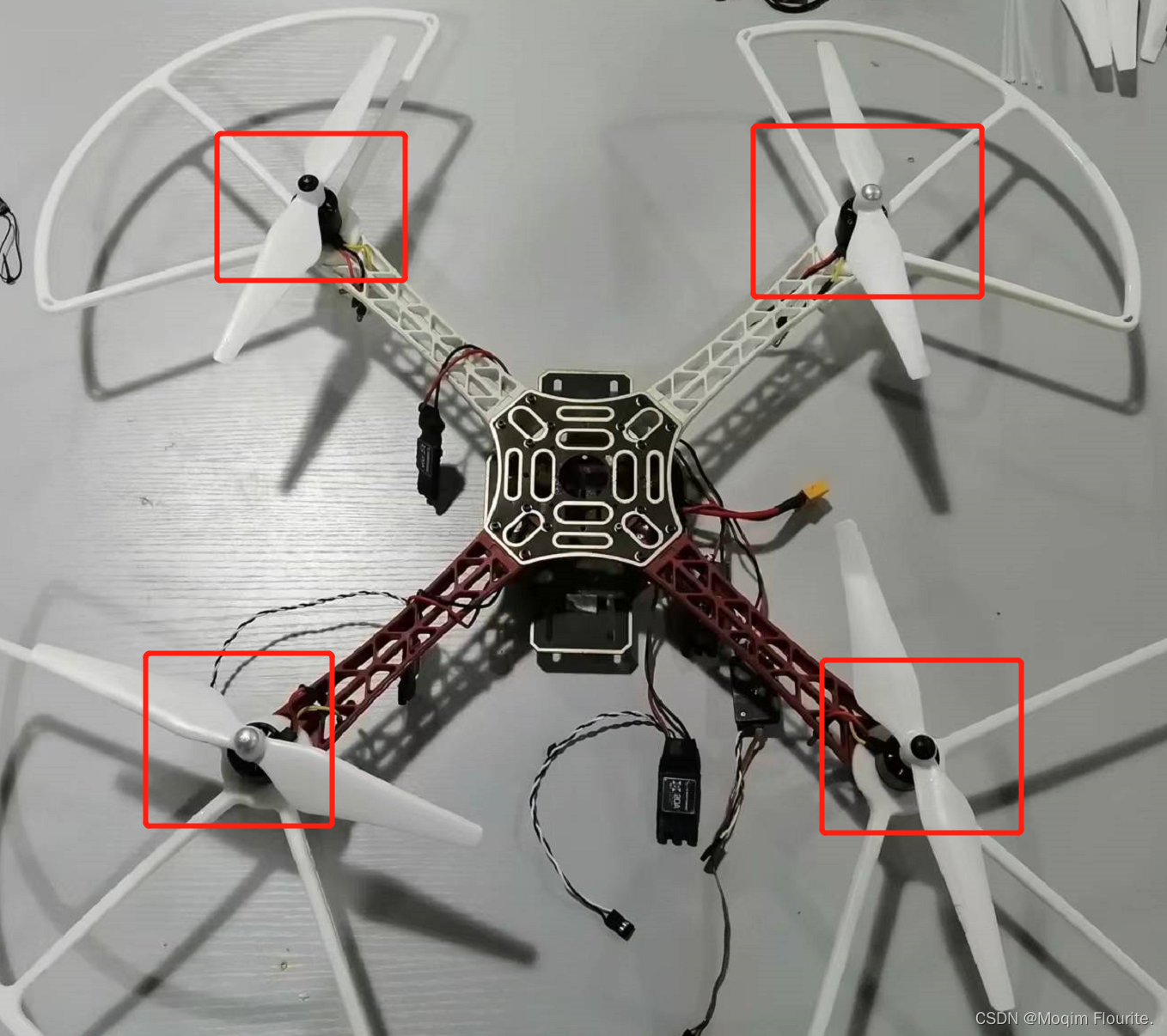
2.组装电机
判断电机正反
看了上面相关资料的同学应该都知道螺旋桨分为正桨和反桨,所以对应的,电机也分为正桨电机和反桨电机。
有些电机上会标注正反——

一般默认白色标志为正桨,黑色标志为反桨,所以上图中中间两个即为正桨电机,另外两个就是反桨电机了。问题来了,如果你们的电机上没有这个标志呢?

由于电机与螺旋桨是一一配对的,正桨电机只能安装正桨螺旋桨,反之亦然。所以我们可以先判断螺旋桨的正反,然后安装到电机上,这样就能判断出电机的正反了。
但是,问题又来了,如果螺旋桨上也没有标注呢?

别急,仔细观察桨叶,可以发现桨叶之间是有区别的——

有些螺旋桨是往右凸出,有些螺旋桨是往左凸出,往右凸出(顺时针)的就是正桨,往左凸出(逆时针)的就是反桨。好了,判断完桨叶,我们就要安装到电机上了,记得注意正反桨的安装方向——
正桨顺时针锁定,逆时针解锁;

反桨逆时针锁定,顺时针解锁;

安装完后就是这样的了——

选择螺丝

有护桨的选择左边的螺丝(更长),
没护桨的用右边的螺丝(更短);
注意,用长螺丝组装电机一定要装护桨,否则螺丝会顶到电机,导致电机烧毁。
(虽然我们在活动筹备阶段已经分好螺丝了,但是大家需要养成这个习惯)组装电机
安装方向:默认机头右上角为正桨,然后对角电机相同。
为了防止装歪电机,推荐先把电机线从孔里钻出,然后对角接螺丝。
这里也要注意把螺丝拧紧哦。
【电机安装 - 对角顺序接螺丝】 
【电机安装 - 正面】

【电机安装 - 背面】
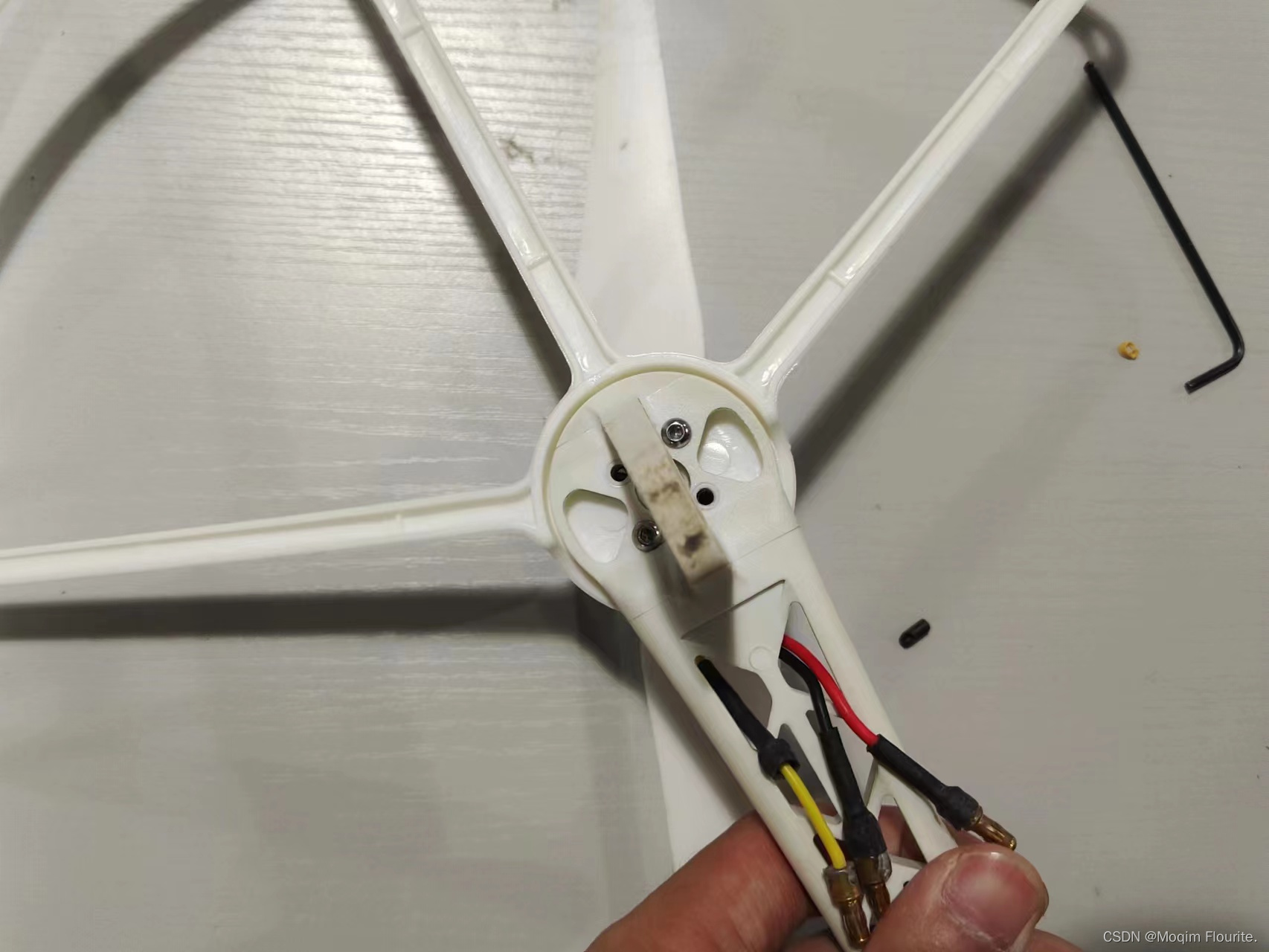
连接电调
电机和电调都是插拔式接口,直接接上就行啦——


安装好后记得用绑带固定住电调——

3.组装飞控、LED、接收机、电源管理模块
安装位置
注意飞控的朝向("NAZA"文字方向)一定要指向机头方向;
接收机尽量安装在下面;
电源管理模块安装在中心板上就行;
LED灯粘到机尾的一个机臂上;
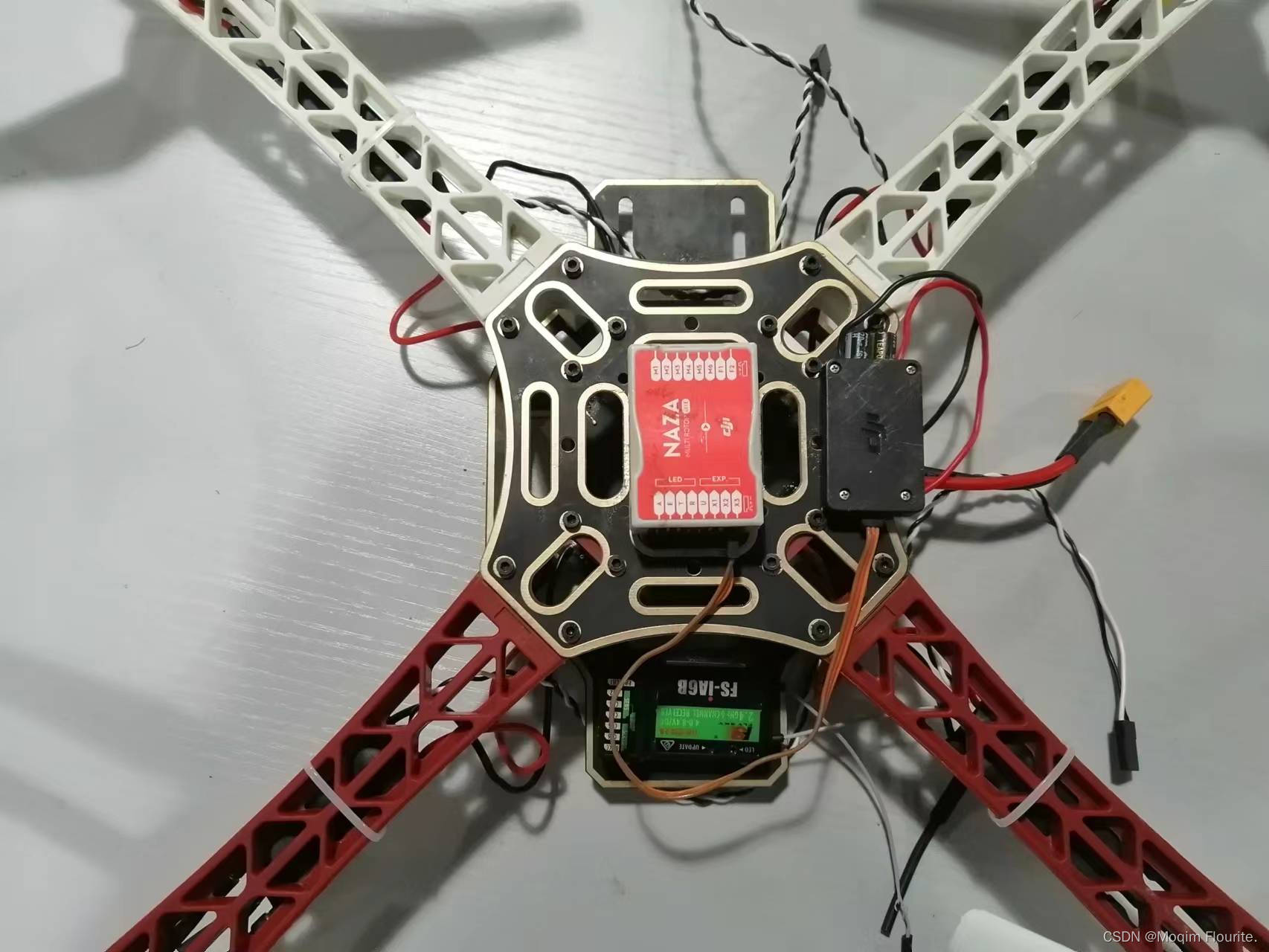
【飞控、接收机、电源管理模块安装】 
【LED灯模块安装】
接线方法
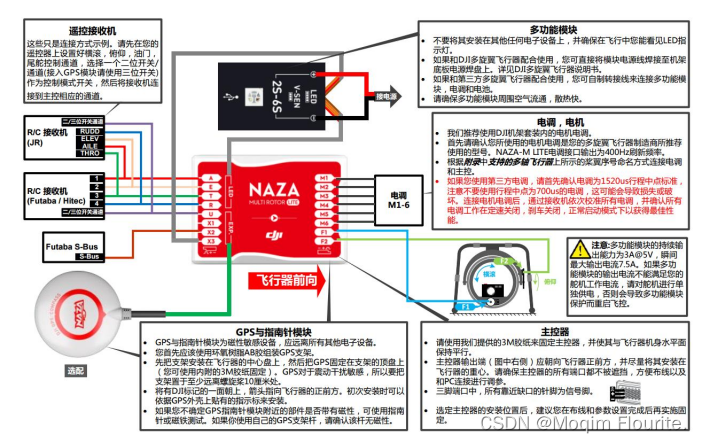
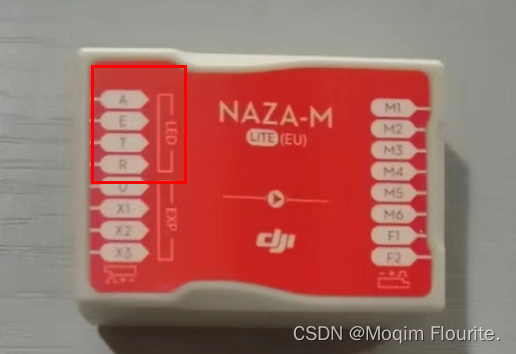
接收机接线

五根数据线,接到CH1-CH5;
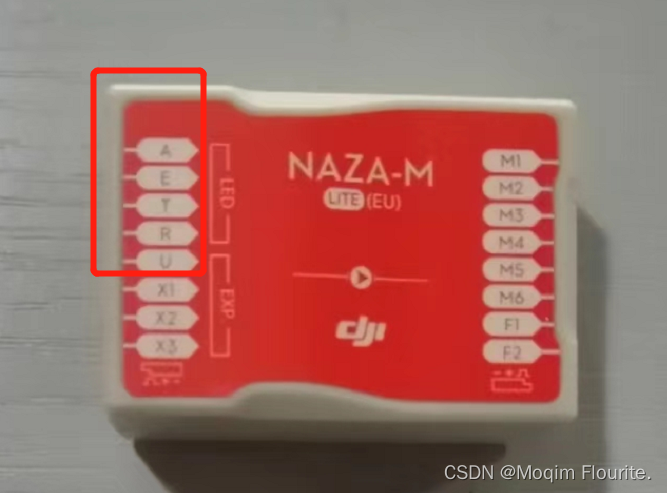
然后按顺序CH1接到A,CH2接到E…CH5接到U就行。电调接线
以机头右上角的电调为1号,逆时针接到飞控的M1-M4端口。

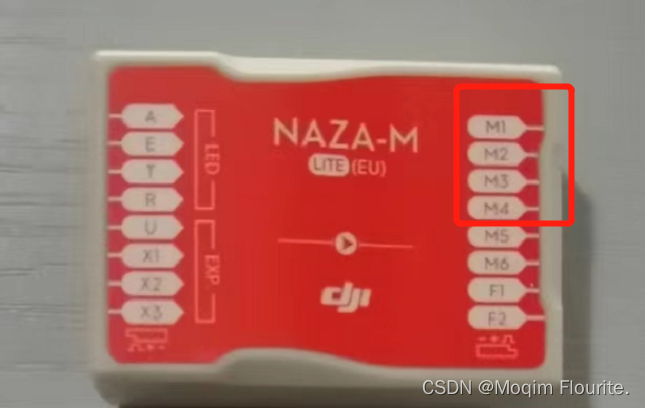
电调线分为黑色和其他颜色,黑色为接地(负极)。

飞控上标注是负极朝上,接着是正极、信号线。
所以大家接线的时候注意要让黑色的线在最上面——

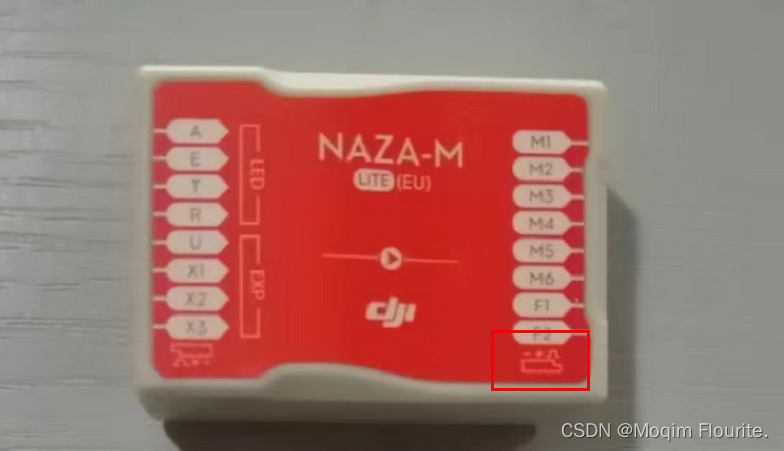
电源管理模块接线
电源管理模块后面写了"X3",所以接到飞控的"X3端口"。

LED接线
4.接电,与接收机对码
遥控器的基本使用方法
接收机对码
5.判断电机方向
如何判断,为什么要这样做
注意不能接螺旋桨6.安装螺旋桨
如何安装,注意安装方向
-
相关阅读:
ELK框架Logstash配合Filebeats和kafka使用
小程序入门——详细教程
软件测试之自动化测试
怎么批量提取文件名字到Excel中?
Spring拦截器的简单应用
【Python】获取变量占用的内存大小
python下celery的基本使用
2023最新SSM计算机毕业设计选题大全(附源码+LW)之java我为群众办实事资料管理系统58g55
通讯录多版本代码归纳
数据结构:单链表
- 原文地址:https://blog.csdn.net/weixin_55374353/article/details/127344399