-
Games101-Chapter14-Ray Tracing 2
上节课复习:

---------------------------本节课探讨AABB怎么加速光线与场景求交问题-----------------------


格子不能太稀疏也不能太密集
这种方法什么好用什么时候不好用
好用:

不好用:

另一个技术-----空间划分(Spatial Partitions)

Oct-Tree是八叉树,三维中砍三刀,这个图是二维,那就是两刀分成4块,然后再把切出来的每个小区域切分(高维会很复杂)
KD-Tree是只做一次划分,横竖交替
BSP-Tree对空间进行划分,再给子区间划分(不是横平竖直滴)(高维会很复杂)


接下来康康如何用KD-Tree进行加速
(和父节点相交,也得看看和子节点是否相交)
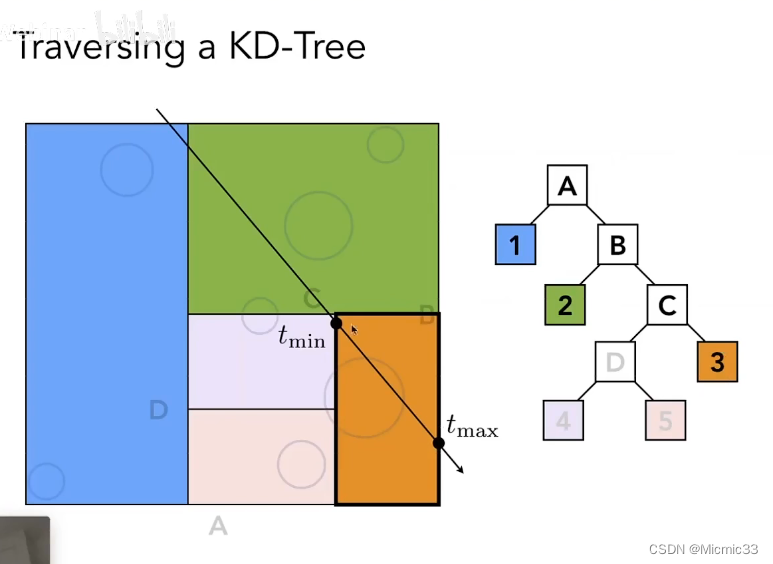

如果光线和叶子结点有交点,那么这个结点里所有物体都要和光线求交
--------------------------------------------------------------------------------------------------
对物体而不是空间进行划分----Object Partitions----->形成Bounding Volume Hierarchy结构(BVH)
比如,绿色三角形的包围盒与蓝色的包围盒有交集,但绿色三角形并不在蓝色包围盒里~~~
因此BVH就避免了KD-Tree一个物体在好几个结点的问题


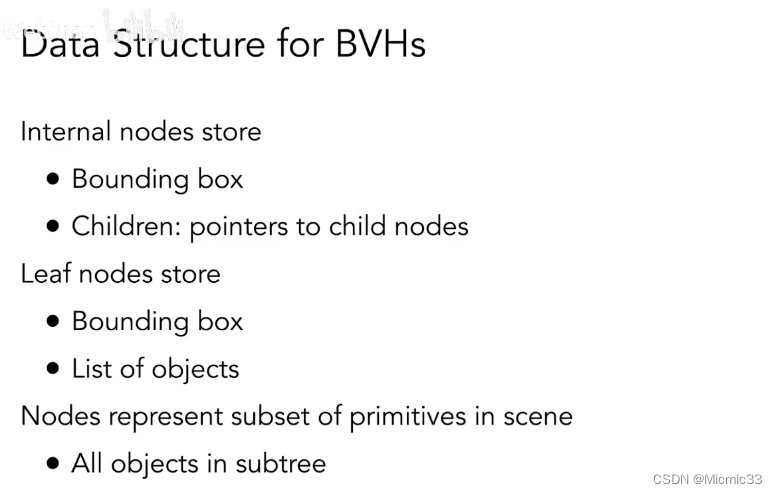
存储结构:
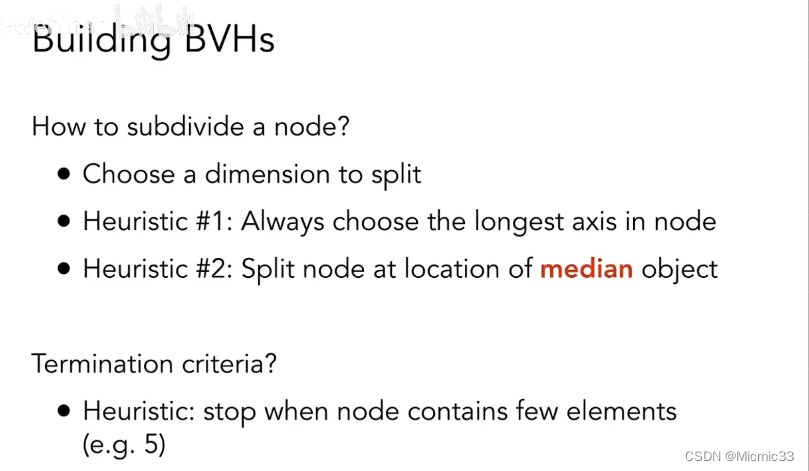
算法:

来对比下BVH和KD-Tree

-------------------------------------------------------------------------------------------------------
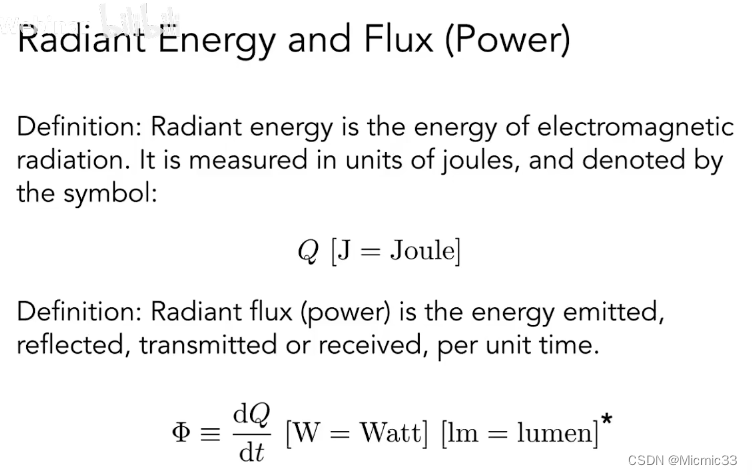
辐射度量学radiometry

下面来依次了解这些概念


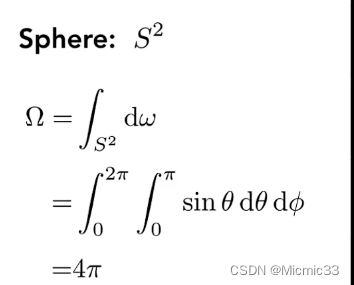
啥是立体角:

单位立体角:

立体角在整个球面上的积分:
-
相关阅读:
蓝桥杯算法记录
【Rust日报】2022-08-12 用 Rust 为 Linux 编写新的 Apple Silicon GPU 驱动程序
Java Class isAnonymousClass()实例讲解
【小程序源码】特效语音支持多种音效
word页脚的页码全都一样
golang学习之路1-环境安装及Helloword
基于3D扫描和3D打印的产品逆向工程实战【数字仪表】
2021全美IB课程优秀学校TOP10
什么是MQ和认识RabbitMQ
聪明人都在这样做,快来看
- 原文地址:https://blog.csdn.net/weixin_53459056/article/details/127102105