-
游戏思考17:寻路引擎recast和detour学习三:客户端角度学习(unity专题导航系统)(09/19)
一、如何构建导航网格
1)导航系统作用
帮助角色进行AI智能移动:朝目标移动,绕过障碍物,上下台阶…
2)导航系统包括
①导航网格(NavMesh):下图的蓝色地形,可以行走的表面
②导航网格代理组件(NavMesh Agent):模拟人物移动和寻路
③导航网格障碍物(NavMesh Obstacle):定义物体为障碍物,这样导航网格代理就能绕过障碍物进行路径的选择
④网格外链接(Off-Mesh Link):地形中间没有相连的话,两点可以跳跃

3)做一个简单的导航Demo
- 步骤简短声明

(1)在Scene这个目录下构建一个场景叫NavigationDemo0502

(2)在场景新建一个地面(3D-Plane)
(3)打开navigation窗口(在AI的窗口里面)

会有个窗口

把平面这个obj设成静态的

进行烘焙

这样plane就会有蓝色的内容出现
(4)因为要模仿人物移动,这里用个柱体代替人物(右键创建个Cylinder)
(5)想要这个圆柱体移动,就给他添加一个Nav Mesh Agent 组件

(6)给这个圆柱体一个目标Cube(右键新建3D->Cube),改名为target

(7)创建脚本Script目录,新建C#脚本文件CharacterNavigationControl.cs,并把这段代码添加到Character身上,并修改这段代码

载入脚本包 using UnityEngine.AI public class CharacterNavigationControl: MonoBehaviour { //导航网格代理 public NaviMeshAgent _character; //坐标三元素 public Transform targetTransform; void Start() { _character = this.GetComonent<NavMeshAgent>(); if(_character && targetTransform) { _character.destination = targetTransform.position; } } ](8)绑定两个物体,character绑定在Character里面,Target放在 Target Transform里面

(9)这样自动就会从开始位置位移去Cube target的位置

二、当行网格烘焙与烘焙设置
1)对应相关参数

2)参数讲解
(1)Agent Radius 参考导航网格代理角色半径,代理角色中心位置与墙壁或窗台可接近的最小距离 (2)Agent Height 参考导航网格代理角色高度,角色可到达的空间的最小高度(代表人物行走的高度) (3)Max Slope 代理角色可走上坡道的陡峭程度,小于这个度数的话,人物可以行走 (4)Step Height 代理角色可以踏上障碍物的高度,阶梯的高度设置(低于这个高度的台阶,人物就可以行走) (5)Drop Height (6)Jump Distance --(5)和(6)都是网格外连接的设置 (7)Min Region Area 最小烘焙大小(存在大于这个值的地区,就能烘焙出来网格)

三、导航网格代理与自动巡逻角色
1)导航网格代理
(1)对应设置

Base offset 碰撞圆柱体相对于变换轴心点的偏移 1)Steering 驾驶 --Speed 最大移动速度(世界单位/秒),移动的速度 --Angular Speed 最大旋转速度(度/秒),角度转换的速度 --Acceleration 最大加速度(世界单位/平方秒表示),比如说0到3.5这个速度过程是有一定加速度的 --Stopping distance 当靠近目标位置的举例到达此值时,代理将终止 --Auto Braking 启动此属性后,代理在到目标时将减速。对于巡逻等行为(这种情况下,代理在多个点之间平滑移动)应禁用此属性 2)Obstacle Avoidance 避开障碍 --Quality:障碍躲避质量,如果拥有大量代理,则可以通过降低障碍躲避质量来节省CPU时间。如果躲避设置为无,则只会解析碰撞,而不会常使主动躲避其他代理和障碍物。 --Priority 优先级,执行障碍时,此代理将忽略优先级较低的代理,此值在0~99范围内,其中较低的数字表示较高的优先级(比如前面有两个障碍物,会躲避优先级比较高的障碍物) 3)Path Finding 路径寻找 --Auto Traverse OffMesh Link :设置为true 可自动遍历网格外连接(Off-Mesh Link)。如果要使用动画或某种方式遍历网格外连接,则应关闭此功能 --Auto Repath: 启用此属性后,代理将在到达部分路径末尾时常使再次寻路。当没有到达目标的路径时,将生成一条部分路径通向与目标最近的可达位置 --Area Mask :Area Mask 描述了代理在寻路时将考虑的区域类型(Jump、Walkable、Not Walkable) 若没有设置Jmp的网格,那只设置jump的话就没办法移动2)练习一:创建个巡逻的AI角色
- 步骤
1) 创建场景,添加Plane、Cube 2) 使用Cube构建一个带台阶的地形 3) 构建导航网格 4) 创建Cylinder,添加NavMesh Agent组件 5) 创建若干个Sphere,随机位置摆放 6) 新建脚本MoveTo,设置Agent的destination,让角色在各个点巡逻1)创建多个target

2)编辑这个Character的脚本

using UnityEngine.AI public class CharacterNavigationControl: MonoBehaviour { //导航网格代理 public NaviMeshAgent _character; public Transform targetTransformFather; public Transform[] targetTransforms; //创建个目标数组 //坐标三元素 public Transform targetTransform; int destinationIndex = 0; void Start() { targetTransform = targetTransformFather.GetComponentsInChildren<Transform>(); _character = this.GetComonent<NavMeshAgent>(); if(_character && targetTransform) { //开始的时候跟随第一个目标 _character.destination = targetTransforms[0].position; } } void Update() { //表示不在计算过程中且已经到达目标就绪(!pathPending) if(!_character.pathPending && _character.remainingDistance<0.5f) { //每次到下一个目标点 destinationIndex = (destinationIndex + 1) % targetTransforms.Length; _character.destination = targetTransforms[destinationIndex].position; } } ]这里要设置father的Target

就会发现会找到所有transform

这样就能在各个目标间寻路
- 相关名词解释

3)练习二、构建一个朝目标位置移动的角色
- 流程
1)构建导航网格 2)创建Capsule,添加NavMesh Agent组件 3)新建脚本MousePointMove 4)通过射线投射,获取涉嫌投射点,设置导航代理朝着投射点移动1)导航网格之前设置过
2)构建一个3D的胶囊体并命名为player

3)新建脚本MousePointMove

把脚本拖到player上

public class MousePointMove:MonoBehaviour { void Start() { } void Update() { //鼠标右键点击是1 if(Input.GetMouseButtonDown(1)) { //需要返回射线相交于地面的位置 RaycastHit hit; //从启示点到目标点发射一个射线 if(Physicd.Raycast(Camera.main.ScreenPointToRay(Input.mousePosition),out,hit,1000f)) { this.GetComponent<NavMeshAgent>().destination = hit.point; } } } }4)相机有点远的话就调整下相机的位置

设置相机斜角

鼠标右键点击就可以移动

可以调整下速度或上下坡,自动会根据导航网格寻路四、导航网格障碍物组件(Navmesh Obstacle,动态障碍物)
1)概念介绍
-
概念
Unity用这个组件来定义障碍物。当障碍物移动时,导航网格会尽力避开,障碍物静止时,会在导航网格上留下一个不可移动的孔 -
参数结束
Carve: 雕刻,勾选后,导航网格障碍物会在导航网格中创建一个孔 Move Threshold: 当导航网格的移动超过Move Threshold设置的值时,Unity会将其视为移动状态。 使用此属性可设置该阈值举例来更新移动的雕刻孔洞 Time To Stationary : 将障碍物视为精致状态所需等待时间(以秒为单位) Carve Only Stationary: 用此属性后,只有再静止状态时才会雕刻障碍物- 障碍物举例
可以看到当前的这个方块体Cube是个障碍物,Cube四周的面都是灰色

设置这个Cube为Not Walkable时,再烘焙下,中间就不能走动

2)实现客户端动态障碍物
(1)创建个Cube

(2)添加导航网格障碍物组件(做动态障碍物)
(3)选中Carve,自动在网格雕刻一个孔

五、网格外链接组件(Off-Mesh Link)
1)组件作用
连接两个没有相连行走表面的位置
2)参数解释
Start/End: 网格外链接两端位置的Transform Cost Override: 计算处理路径请求的路径成本,涉及到一些性能考虑 Bi-Directional; 如果启用此属性,则可以再任意方向上遍历链接。否则,只能按照从Start到End的 方向遍历链接(若取消只能从Start到End遍历) Activated: 到指定寻路器(pathfinder) 是否将使用此链接(不勾选的话,不能走这条路径) Auto Update Positions: 如果启用此属性,当端点移动时,网格外链接将重新链接到导航网格。如果禁用,即使移动了端点,链接也将保持其起始位置l(这个设置没啥大用) Navigation Area: 链接的导航区域类型(可选有很多,例如Walkable)3)网格外链接添加操作
(1)给第一个平面添加网格外链接

(2)创建两个位置(起点和终点位置)
①创建两个Cube在两个不同平面上
②设置成静态的
③烘焙

④两个Cube移动到网格外链接的Start和End

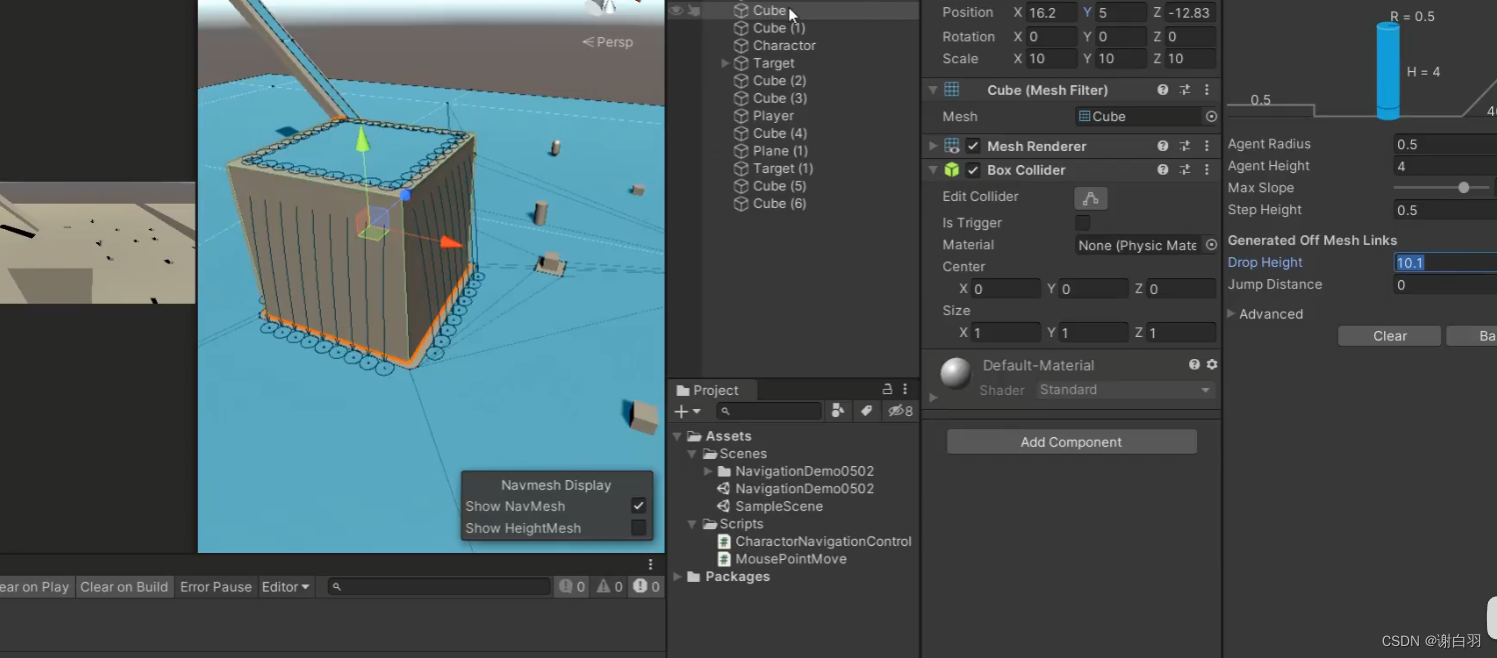
4)设置烘焙时自动生成网格外链接(并设置网格外连接的属性)
①勾选设置

②在烘焙里面设置网格外链接的属性Drop Height 15 跳跃的高度 Jump Distance 10 落下的距离当设置跳跃高度大于某个小物体的高度时,也会生成网格外连接(图中方块高度为10,跳跃高度为10.1,刚好能跳上去)
③一般都是用网格外连接的组件去做网格外连接,因为自动生成会有很多不必要的外链接
如图:

- 步骤简短声明
-
相关阅读:
MyBatis 进阶
【大模型】更强的开源可商用的中英文大语言模型baichuan2来了,从零开始搭建
openlayers+vue的bug
自接触svn之后对git的了解及其应用
java项目使用GRPC框架
LeetCode算法题解|LeetCode435. 无重叠区间、LeetCode763. 划分字母区间、LeetCode56. 合并区间
深入了解队列数据结构:定义、特性和实际应用
Lenovo Quick Fix:关闭或开启Win10系统的自动更新
HCIP---VRRP
最大似然估计,散度,交叉熵
- 原文地址:https://blog.csdn.net/weixin_43679037/article/details/126880088