-
[单片机框架][bsp层][N32G4FR][bsp_adc] ADC配置和使用
ADC 介绍
12 位 ADC 是一种高速逐次逼近型模拟数字转换器。它有多个通道。各通道的 A/D 转换可以单次、连续、
扫描或间断模式执行。ADC 的结果可以左对齐或右对齐方式存储在 16 位数据寄存器中。
模拟看门狗特性允许应用程序检测输入电压是否超出用户定义的高/低阀值。
ADC 的输入时钟不得超过 72MHz。ADC 主要特征
支持最多 2 个 ADC,支持单端输入和差分输入,可测量 16 个外部和 3 个内部信号源
ADC1 支持 9 个外部通道,ADC2 支持 7 个外部通道
支持 12 位、10 位、8 位、6 位分辨率可配置
12bit 分辨率下最高采样速率 5.14MSPS
10bit 分辨率下最高采样速率 6MSPS
8bit 分辨率下最高采样速率 7.2MSPS
6bit 分辨率下最高采样速率 9MSPS
ADC 时钟源分为工作时钟源、采样时钟源和计时时钟源
仅可配置 AHB_CLK 作为工作时钟源,最高可到 144MHz
可配置 PLL 作为采样时钟源,最高可到 72MHz,支持分频 1,2,4,6,8,10,12,16,32, 64,128,256
可配置 AHB_CLK 作为采样时钟源,最高可到 72MHz,支持分频 1,2,4,6,8,10,12,16,32
计时时钟用于内部计时功能,频率必须配置成 1MHz
支持定时器触发 ADC 采样
转换结束、注入转换结束和发生模拟看门狗事件时产生中断
单次和连续转换模式
从通道 0 到通道 N 的自动扫描模式
支持自校准
带内嵌数据一致性的数据对齐
采样间隔可以按通道分别编程
规则转换和注入转换均有外部触发选项
间断模式
双重模式,ADC1 和 ADC2 组合
ADC 供电要求:1.8V 到 3.6V
ADC 输入范围:VREF-≤ VIN ≤ VREF+
规则通道转换期间有 DMA 请求产生。ADC 功能描述
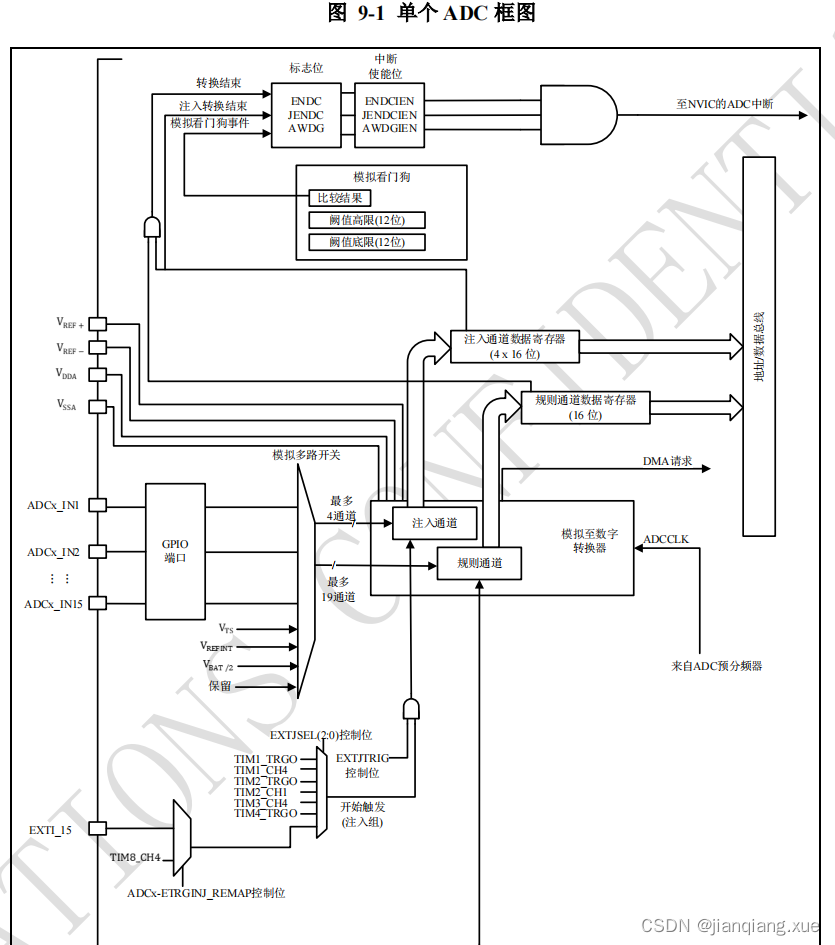
下图为一个 ADC 模块的框图,表 9-1 为 ADC 引脚的说明。


ADC 开关控制
用户必须等待 PowerUp 过程完成才可以进入下一步的操作,可以通过查询 ADC_CTRL3 里面的 RDY 确认
是否上电完成。
通过设置 ADC_CTRL2 寄存器的 ON 位可给 ADC 上电。当第一次设置 ON 位时,它将 ADC 从断电状态下
唤醒。ADC 上电延迟一段时间后(tSTAB),再次设置 ON 位时开始进行转换。
通过清除 ON 位可以停止转换,并将 ADC 置于断电模式。在这个模式中,ADC 几乎不耗电(仅几个 μA)。
用户可以通过查询 ADC_CTRL3 里面的 PDRDY 确认是否下电完成。
在 ADC Disable 的时候默认都是 PowerDown 模式,这个模式下只要不断电,不需要重新校正,校正值会在ADC 自动保持。为了进一步的降低功耗 ,ADC 有设计一个深睡眠模式。会在 ADC Disable 进入深睡眠模式,ADC 内部的校正值会丢失,需要重新校正。深睡眠模式可以省大概 0.2μA 的功耗 ,注意,当在双 ADC 模式时,最好双 ADC 都选同一种睡眠模式。控制 ADC 深睡眠模式的寄存器ADC_CTRL3.DPWMOD。内部通道
温度传感器和通道 ADC1_IN16 相连接
VBAT/2 和通道 ADC1_IN17 相连接
内部参照电压 VREFINT 和 ADCx_IN18 相连接
可以按注入或规则通道对内部通道进行转换。
注意:温度传感器,VBAT/2 只能出现在主 ADC1 中。#include "n32g4fr.h" #include "n32g4fr_adc.h" #include "errorno.h" #include "bsp_adc.h" #define ADC_REGU_CH_SEQ_LEN 1 #define ADC_WAIT_RET_TIMEOUT 1000 #define ADC_RET_INIT_VALUE 0xAB #define ADC_VDD_POWER_MV 3299 #define ADC_DATA_MAX 4095 #define ADC_READ_INVALID_TIMES 5 /*******************************ADC1 config*****************************/ #define ADC1_MODULE ADC1 #define ADC1_IN_PORT GPIOA #define ADC1_IN_PIN (GPIO_PIN_2 | GPIO_PIN_6) #define ADC1_IN_PORT_RCC RCC_APB2_PERIPH_GPIOA #define ADC1_RCC RCC_AHB_PERIPH_ADC1 /*******************************ADC2 config*****************************/ #define ADC2_MODULE ADC2 #define ADC2_IN_PORT GPIOA #define ADC2_IN_PIN (GPIO_PIN_2 | GPIO_PIN_4 | GPIO_PIN_7) #define ADC2_IN_PORT_RCC RCC_APB2_PERIPH_GPIOA #define ADC2_RCC RCC_AHB_PERIPH_ADC2 typedef struct { ADC_Module* ADCx; GPIO_Module* gpio_x; uint16_t gpio_pin; uint32_t gpio_rcc; uint32_t adcx_rcc; } adc_config_t; const adc_config_t g_adc_configs[BSP_ADC_NUM] = { { .ADCx = ADC1, .gpio_x = ADC1_IN_PORT, .gpio_rcc = ADC1_IN_PORT_RCC, .gpio_pin = ADC1_IN_PIN, .adcx_rcc = ADC1_RCC, }, { .ADCx = ADC2, .gpio_x = ADC2_IN_PORT, .gpio_rcc = ADC2_IN_PORT_RCC, .gpio_pin = ADC2_IN_PIN, .adcx_rcc = ADC2_RCC, } }; void bsp_adc_io_rcc_enable(bsp_adc_t bsp_adc) { RCC_EnableAPB2PeriphClk(g_adc_configs[bsp_adc].gpio_rcc, ENABLE); } void bsp_adc_io_config(bsp_adc_t bsp_adc) { GPIO_InitType GPIO_InitStruct; GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AIN; GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; GPIO_InitStruct.Pin = g_adc_configs[bsp_adc].gpio_pin; GPIO_InitPeripheral(g_adc_configs[bsp_adc].gpio_x, &GPIO_InitStruct); } void bsp_adc_rcc_enable(bsp_adc_t bsp_adc) { RCC_EnableAHBPeriphClk(g_adc_configs[bsp_adc].adcx_rcc, ENABLE); RCC_ConfigHclk(RCC_SYSCLK_DIV1); RCC_ConfigAdcHclk(RCC_ADCHCLK_DIV32); RCC_ConfigAdc1mClk(RCC_ADC1MCLK_SRC_HSI, RCC_ADC1MCLK_DIV8); } void bsp_adc_init(bsp_adc_t bsp_adc) { ADC_InitType ADC_InitType_data; ADC_Module* ADCx = g_adc_configs[bsp_adc].ADCx; int timeout = 0; bsp_adc_io_rcc_enable(bsp_adc); bsp_adc_io_config(bsp_adc); bsp_adc_rcc_enable(bsp_adc); ADC_InitType_data.WorkMode = ADC_WORKMODE_INDEPENDENT; ADC_InitType_data.ContinueConvEn = DISABLE; ADC_InitType_data.ChsNumber = ADC_REGU_CH_SEQ_LEN; ADC_InitType_data.DatAlign = ADC_DAT_ALIGN_R; ADC_InitType_data.ExtTrigSelect = ADC_EXT_TRIGCONV_NONE; ADC_InitType_data.MultiChEn = ENABLE; ADC_DeInit(ADCx); ADC_Init(ADCx, &ADC_InitType_data); ADC_Enable(ADCx, ENABLE); timeout = 0; while (RESET == ADC_GetFlagStatusNew(ADCx, ADC_FLAG_RDY)) { timeout ++; if (timeout > ADC_WAIT_RET_TIMEOUT) { return ; } } ADC_StartCalibration(ADCx); timeout = 0; while (SET == ADC_GetCalibrationStatus(ADCx)) { timeout ++; if (timeout > ADC_WAIT_RET_TIMEOUT) { return ; } } } uint16_t bsp_adc_get_one_data(bsp_adc_t bsp_adc, uint8_t ADC_Channel) { int32_t timeout = 0; uint32_t adc_data = ADC_RET_INIT_VALUE; ADC_Module* ADCx = g_adc_configs[bsp_adc].ADCx; ADC_ConfigRegularChannel(ADCx, ADC_Channel, 1, ADC_SAMP_TIME_239CYCLES5); ADC_ClearFlag(ADCx, ADC_FLAG_ENDC); //ADC_Enable(ADCx,ENABLE) ADC_EnableSoftwareStartConv(ADCx, ENABLE); timeout = 0; while (RESET == ADC_GetFlagStatus(ADCx, ADC_FLAG_ENDC)) { timeout ++; if (timeout > ADC_WAIT_RET_TIMEOUT) { return adc_data; } } adc_data = ADC_GetDat(ADCx); ADC_ClearFlag(ADCx, ADC_FLAG_ENDC); return adc_data; } uint16_t bsp_adc_get_data(bsp_adc_t bsp_adc, uint8_t ADC_Channel) { uint32_t invalid_read_times = 0; for (invalid_read_times = 0;invalid_read_times < ADC_READ_INVALID_TIMES;invalid_read_times++) { bsp_adc_get_one_data(bsp_adc, ADC_Channel); } return bsp_adc_get_one_data(bsp_adc, ADC_Channel); } uint16_t bsp_adc_convert_to_mvoltage(bsp_adc_t bsp_adc, uint16_t adc_data) { uint16_t adc_vref = bsp_adc_get_data(bsp_adc, ADC_CH_0); if(adc_vref != 0) { return adc_data * ADC_VDD_POWER_MV / adc_vref; } else { return adc_data * ADC_VDD_POWER_MV / ADC_DATA_MAX; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
#ifndef __BSP_ADC_H__ #define __BSP_ADC_H__ #include "typedefs.h" typedef enum { BSP_ADC_1 = 0, BSP_ADC_2, BSP_ADC_NUM } bsp_adc_t; void bsp_adc_init(bsp_adc_t bsp_adc); uint16_t bsp_adc_get_data(bsp_adc_t bsp_adc, uint8_t ADC_Channel); uint16_t bsp_adc_convert_to_mvoltage(bsp_adc_t bsp_adc, uint16_t adc_data); #endif- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
-
相关阅读:
推荐一款可以快速抽取sap数据的ETL工具
C#.NET体系图文概述—2024最全总结
JavaGUI——Java图形用户界面
充电桩平台如何实现高并发:emgx如何实现高并发?背后的技术原理
【Java】一文秒懂http请求获取FlexManager某设备分组监控点
如何用看板工具做轻量级项目管理
群狼调研(长沙品牌调研)开展长沙消费者满意度调查
【Go】单例模式与Once源码
PyCharm 远程连接服务器并使用服务器的 Jupyter 环境
[附源码]计算机毕业设计springboot创新创业管理系统
- 原文地址:https://blog.csdn.net/qq_29246181/article/details/126776193
