-
【数据结构初阶-排序】经典的排序算法,很有趣,有没有你不会的呢
前言
本期分享经典排序:
- 插入排序
- 直接插入排序
- 希尔排序
- 选择排序
- 直接选择排序
- 堆排序
- 交换排序
- 冒泡排序
- 快速排序
- 归并排序
- 非比较排序
- 计数排序
注:讲解时默认排升序
插入排序
直接插入排序
思想
插入排序,就像玩扑克时,摸牌的过程:
- 最开始,左手没牌,右手从牌堆中摸
- 右手每次摸进一张牌,都从右到左比较,找到位置插入新牌
- 如此一来就能保证左手的排始终有序,摸完牌后也就排序完成
操作
- 设begin为已排序序列 arr1 的左闭区间,end为 arr1 的右闭区间,则有 arr1 的左闭右闭区间 [begin, end]
- 单趟排序:
- 每次保存起未排序序列 arr2 的元素 arr[end+1] 为 tmp,从右到左和 arr1 的元素比较
- 是正确位置:插入
- 不是正确位置:arr[end] 往后挪,tmp接着从右到左和 arr1 的元素比较
- 每次保存起未排序序列 arr2 的元素 arr[end+1] 为 tmp,从右到左和 arr1 的元素比较
- 整体趟数:
- 若元素个数为n,需要排n趟
void InsertSort(int* arr, int sz) { //end + 1 < sz //end < sz - 1 int i = 0; for (i = 0; i < sz - 1; i++) { int end = i; int tmp = arr[end + 1]; //找插入位置 while (end >= 0) { //不是插入位置:当前数据往后挪 if (tmp < arr[end]) { arr[end + 1] = arr[end]; end--; } //是插入位置:跳出循环插入 else { break; } } //插入 //1. 插入位置是[0],end == -1,不合循环条件跳出 //2. 找到插入位置,break跳出 arr[end + 1] = tmp; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31

稳定性
插入排序中元素都是单一向右挪动,相等的元素不会改变相对顺序,所以
直接插入排序是稳定的
复杂度
时间复杂度
最好:当前元素只需要和前一个比较一下,这时需要比n-1次(最后一个天然有序)
O(n)
最坏:逆序,比较次数:1+2+3+……+n-1 次,为等差数列,数量级为n^2
O(n^2)
空间复杂度
O(1)
希尔排序(缩小增量排序)
希尔排序是直接插入排序的优化版本:按不同步长对元素进行分组,再进行插入排序
优化思想
增量gap不止用来分组,也意味着数据移动的步长,所以
- gap很大时,序列很无序,插入排序的元素少,移动快
- gap不断变小,序列有序多了,插入排序的元素多,但插入排序对相对有序的序列效率高

操作
-
单趟排序:
- 设定一个不断减小的增量gap,也是元素移动的步长
- 以gap对序列分组,并对每组分好的序列进行直接插入排序
- 不断缩小gap,并排序
- *gap>1 时,进行的是预处理排序,gap == 1时进行的是直接插入排序
-
整体趟数:
- 由gap决定:当gap = 1,排序完成
注:增量亦称改变量,指的是在一段时间内,自变量取不同的值所对应的函数值之差。这里指自变量取不同的值,不同分组间排序的差别。
void ShellSort(int* arr, int sz) { int gap = sz; //gap > 1,预处理排序 //gap == 1,直接插入排序 while (gap > 1) { gap = gap / 3 + 1;//保证最后一次gap==1,进行直接插入排序 //gap组 for (int j = 0; j < gap; j++) { //end + gap < sz //end < sz - gap for (int i = j; i < sz - gap; i += gap)//每次跳gap步 { int end = i; int tmp = arr[end + gap]; while (end >= 0) { if (tmp < arr[end]) { arr[end + gap] = arr[end]; end -= gap; } else { break; } } arr[end + gap] = tmp; } } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
其实就是套上”缩小增量“的直接插入排序

稳定性
我们知道一次插入排序是稳定的,不会改变相同元素的相对顺序,但在多次不同的插入排序过程中,相同的元素可能在各自的插入排序中移动,最后其稳定性就会被打乱,所以
希尔排序是不稳定的
复杂度
时间复杂度
希尔排序的时间复杂度随增量的变化而变化,难以计算,根据某位前辈大量实验数据能大概估算:
O(n^1.3)
空间复杂度
O(1)
选择排序
直接选择排序
思想
选择排序,遍历序列,选出最小的元素,交换到左边

优化版本:
每次选出最小元素交换到左边,选出最大元素交换到右边
操作
-
设 begin 为待排序序列 arr 的左闭区间,end为 arr 的右闭区间,则有 arr 的左闭右闭区间 [begin, end]
设 mini 为单趟遍历中最小元素的下标,maxi 为单趟遍历中最大元素下标
-
单趟排序:
- 遍历选最值的下标
- 交换 arr[begin] 和 arr[mini] 、arr[end] 和 arr[maxi]
- (修正)
-
整体趟数
- 若元素个数为n,趟数为 (2/n)
修正:交换最值到其位置时有先后顺序,如果先交换的元素交换后,影响了后交换的元素的交换,则需要修正后交换的元素下标
void SelectSort(int* arr, int sz) { //闭区间: [begin, end] int begin = 0; int end = sz - 1; while (begin < end)//begin == end 最后一个数,天然有序 { int mini = begin, maxi = begin; int i = 0; for (i = begin + 1; i <= end; i++)//俩下标初始化的就是begin,不用选第一个 { if (arr[i] > arr[maxi]) maxi = i; if (arr[i] < arr[mini]) mini = i; } Swap(&arr[mini], &arr[begin]); //修正(预防):如果maxi == begin,mini的数据到begin,真正的maxi的数据其实到mini的位置上 if (maxi == begin) maxi = mini; Swap(&arr[maxi], &arr[end]); begin++; end--; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28

稳定性
选择排序,选到最值后交换,会破坏相同元素的相对顺序,所以
选择排序是不稳定的
复杂度
时间复杂度
最好:
比较次数:O(n^2),只选最小的比较次数为 (n-1) + (n-2) + … + 2 + 1,每次选最大和最小则快一倍,但数量级还是n^2
交换次数:O(1),有序不用交换
O(n^2)
最坏:
比较次数:O(n^2)
交换次数:O(n)
O(n^2)
空间复杂度
O(1)
堆排序
思想
利用堆的性质,每次交换堆顶和最后一个元素,则排好最后一个元素,再把其视作堆外元素,最后对前面的元素重新建堆

操作
- 建大堆
- 单趟排序:
- 选堆顶和堆尾的元素交换,则堆尾的元素排好
- 每次把排好的“堆尾”元素视作堆外元素,并对堆顶重新向下调整建大堆
- 整体趟数:
- 若元素个数为n,则排n趟
void Swap(int* e1, int* e2) { assert(e1 && e2); int tmp = *e1; *e1 = *e2; *e2 = tmp; } void AdjustDown(int* arr, int sz, int parent) { //建大堆,排升序 assert(arr); //默认大孩子是左孩子 int theChild = parent * 2 + 1; while (theChild < sz) { //如果大孩子是右孩子则修正 if (theChild + 1 < sz && arr[theChild + 1] > arr[theChild])//注意右孩子下标合法性 { theChild++; } if (arr[theChild] > arr[parent]) { Swap(&arr[parent], &arr[theChild]); //迭代往下走 parent = theChild; theChild = parent * 2 + 1; } else { break; } } } void HeapSort(int* arr, int sz) { //1.建大堆 int i = 0; for (i = (sz - 2) / 2; i >= 0; i--)//从最后一个结点的父节点开始(最后一层不用调整,天然是堆) { AdjustDown(arr, sz, i); } //2. 选数 i = 1; while (i < sz) { Swap(&arr[0], &arr[sz - i]);//交换堆顶和堆尾 AdjustDown(arr, sz - i, 0);//堆尾视作堆外,对堆顶向下调整重新建堆 i++; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55

稳定性
建堆和向下调整都会打乱元素顺序,所以
堆排序是不稳定的
复杂度
时间复杂度
单趟排序,交换,并对堆顶向下调整重新建堆(O(logn));趟数,n趟,所以堆排序的时间复杂度为
O(n*logn)
空间复杂度
原地建堆
O(1)
交换排序
冒泡排序
思想
冒泡排序,左右元素两两比较,左大于右就交换,一趟排好一个元素
操作
- 单趟排序:
- 每趟排序从左到右两两比较并交换,直到走到已排序的元素就停
- 每趟排好一个元素,所以需要排序的元素每次减少一个
- 整体趟数
- 若元素个数为n,总共需要排n-1趟,最后一个元素天然有序
void BubbleSort(int* arr, int sz) { int i = 0; int j = 0; for (j = 0; j < sz - 1; j++) { for (i = 0; i < sz - j - 1; i++) { if (arr[i] > arr[i + 1]) { Swap(&arr[i], &arr[i + 1]); flag = 0; } } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
优化
当遍历一遍发现序列有序,直接跳出
void BubbleSort(int* arr, int sz) { int i = 0; int j = 0; for (j = 0; j < sz - 1; j++) { int flag = 1; for (i = 0; i < sz - j - 1; i++) { if (arr[i] > arr[i + 1]) { Swap(&arr[i], &arr[i + 1]); flag = 0;//不是有序就置0 } } if (flag)//如果一趟下来还是1代表有序 break; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19

稳定性
相同的元素不交换,即使相同的元素不相邻,排好序后也是按照原来次序相邻起来,所以
冒泡排序是稳定的
复杂度
时间复杂度
最好: 当序列有序
未优化:
O(n^2)
优化:
O(n)
最坏:要进行 n-1 趟排序,每趟交换 n-i 次
O(n^2)
空间复杂度
O(1)
快速排序
思想
分治思想:单趟排序排好一个基准值(key),key的左边都比key小,右边都比key大;再对左区间和右区间进行同样操作。
所以快速排序可以用递归来实现
操作
有三种单趟排序的方法:
Hoare法
-
设 begin 为当前区间的左闭区间,end 为当前区间的有闭区间
左下标 L = begin,右下标 R = end
设 L R 相遇位置为 meeti
称 比 arr[keyi] 小的元素为 “小”比arr[keyi] 大的元素为“大”
称 arr[keyi] 的左边都比key小,右边都比key大这种现象为 ”左小右大“
-
选 键值的下标 keyi
- 左1位置作 keyi,则 R 先走
- 右1位置作 keyi,则 L 先走
-
R找小,
- 找到则停
- 遇到L,则交换 arr[keyi] 和 arr[meeti]
-
L找大
- 找到则交换 arr[L] 和 arr[R]
- 遇到R,则交换 arr[keyi] 和 arr[meeti]

解惑:arr[meeti] 和 arr[keyi] 交换后一定符合”左小右大“吗?
答案是肯定的:


//[left, right] int PartSort(int* arr, int left, int right) { int keyi = left; //相遇则排好一趟 while (left < right) { //R找小 //left < right: 1. 这里也有可能相遇 2. 以免left和right错开 //arr[right] >= arr[keyi]:相等也要过滤掉,1.相等的在左边右边没区别 2.不过滤会死循环——(88888888)怎么排? while (left < right && arr[right] >= arr[keyi]) { right--; } //L找大 while (left < right && arr[left] <= arr[keyi]) { left++; } //相遇就不交换了 if (left < right) Swap(&arr[left], &arr[right]); } int meeti = left; Swap(&arr[keyi], &arr[meeti]); return meeti; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32

解惑:为什么key要选左1/右1,选中间不行吗?

可能有朋友已经想到了:(接近)有序情况,选左1/右1就出问题了,区间会分得很多,递归很深


非常容易栈溢出,怎么解决?针对有序情况,优化选key
优化选key
- 随机选 key (是一种办法,但是不那么彻底)
- 选中间位置作 key
解惑:那先前实现的单趟排序不就失效了吗!
:选到中间位置作key后,arr[begin] 和 arr[keyi]交换,逻辑还是能用原来的逻辑
解惑:如果中间位置选到很小/很大,换到左1后,还是会导致”区间分得多,递归深“的情况嘞?
前辈给出三数取中的方法
- 三数取中
- 在 arr[begin] 、arr[mid]、 arr[end] 中选出中间值
- 这样一来,换到左1的最坏情况也只可能是次小/次大,缓解了“选中间作key””区间分得多,递归深”的痛点
优化选key后的Hoare单趟排序:
int GetMidIndex(int* arr, int left, int right) { int mid = left + (right - left) / 2; // int mid = rand()%(right - left) + left;//增加了一定随机性 if (arr[left] < arr[mid]) { if (arr[right] < arr[left]) mid = left; else if (arr[right] > arr[mid]) mid = mid; else mid = right; } else//arr[left] > arr[mid] { if (arr[right] > arr[left]) mid = left; else if (arr[mid] > arr[right]) mid = mid; else mid = right; } return mid; } int PartSort_Hoare(int* arr, int left, int right) { //中间作key,优化排(接近)有序数组的递归深度:O(N) ==> O(logN) int mid = GetMidIndex(arr, left, right); //单趟排序走的还是左1作key的逻辑,才能保证单趟排成 Swap(&arr[mid], &arr[left]); int keyi = left; while (left < right) { //R找小 while (left < right && arr[right] >= arr[keyi]) right--; //L找大 while (left < right&& arr[left] <= arr[keyi]) left++; if (left < right) Swap(&arr[left], &arr[right]); } int meeti = left; Swap(&arr[keyi], &arr[meeti]); return meeti; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
挖坑法
- 初始状态:L作坑,其下标存为key
- (1) R找小,扔进坑,R作坑
- (2) L找大,扔进坑,L作坑
- 重复 (1) (2)
- 最终,L R 相遇,交换 arr[keyi] 和 arr[meeti]
int PartSort_Hole(int* arr, int left, int right) { int mid = GetMidIndex(arr, left, right); Swap(&arr[mid], &arr[left]); int key = arr[left]; //L作坑 int hole = left; while (left < right) { //R找小,扔进坑,R作坑 while (left < right && arr[right] >= key) right--; arr[hole] = arr[right]; hole = right; //L找大,扔进坑,L作坑 while (left < right && arr[left] <= key) left++; arr[hole] = arr[left]; hole = left; } //meet int meeti = hole; arr[meeti] = key; return meeti; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
前后指针法
此方法理解起来较为抽象,但写起来十分简洁方便,不像前两种方法易错的地方较多
- cur找小,找到则停
- ++prev
- 如果 prev != cur,交换 arr[prev] 和 arr[cur]
- 如果 prev == cur,不交换
- 当cur越界,代表找完,排好序了
prev == cur 为什么就不交换呢,跟自己交换没必要——比较一下和交换一下的性能损耗相比,肯定是比较来得低

int PartSort3(int* arr, int left, int right) { int mid = GetMidIndex(arr, left, right); Swap(&arr[mid], &arr[left]); //int key = arr[left]; int keyi = left; int prev = left; int cur = prev + 1; //cur越界:找完小的,prev的左边全小,prev右边全大 while (cur <= right) { //++prev == cur 没必要交换 if (arr[cur] < arr[keyi] && ++prev != cur) Swap(&arr[prev], &arr[cur]); cur++; } //键值存是的值: //Swap(&arr[prev], &key);错!key在这里是单趟排序的局部变量,我们要和arr[left]换 //Swap(&arr[prev], &arr[left]);//这才对 //键值存的是下标: Swap(&arr[prev], &arr[keyi]); return prev; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
整体排序
递归——每次排好 arr[meeti],分出左区间[beign, meeti-1] 和 右区间 [meeti+1, end],再对左右区间快排
//[begin, end] void QuickSort(int* arr, int begin, int end) { //meeti位置符合有序 + 左区间有序 + 有区间有序 = 整体有序 // [begin, meeti-1] - meeti - [meeti+1, end] //1.begin > end:超出范围 //2.begin == end:一个数天然有序 if(begin >= end) return; //排好meeti int meeti = PartSort3(arr, begin, end); //排好左右子区间 QuickSort(arr, begin, meeti - 1); QuickSort(arr, meeti + 1, end); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
…
没想到吧,还还还还有可以优化的地方!
优化小区间

如图所说,小区间内数很少,却消耗巨大,不如粗暴便捷地直接调用插入排序
那什么算是小区间?
其实小区间没有确切标准,8-15左右都可以的

这里就把小区间定义为 含有 8个数或以内 的区间
//[begin, end] void QuickSort(int* arr, int begin, int end) { if (begin >= end) return; if (end - begin + 1 <= 8)//小区间优化:后三层直接排 { InsertSort(arr + begin,//可能是上一层的左子区间/右子区间 end - begin + 1);//左闭右闭,如 [0,9] 有 9 - 0 + 1 = 10个数据 } else { int meeti = PartSort3(arr, begin, end); QuickSort(arr, begin, meeti - 1); QuickSort(arr, meeti + 1, end); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
稳定性
快速排序是不稳定的
复杂度
时间复杂度
O(n * logn)
空间复杂度
O(1)
快速排序非递归
为了解决彻底递归深度深的痛点,我们来试着把它改成非递归
思路:
递归深度深,栈的空间又小,会栈溢出…
那不如把函数递归“载体”换一个,在堆上手动开辟一个栈(数据结构的栈),栈帧里存什么,我们堆上的栈里就存什么!
核心思路:在堆上创建“栈帧”
快排的递归,栈帧内存储的最关键的数据是什么?区间。有了区间就能不断排序、分区间,排序、分区间…keyi都是可以算的

操作
在用数据结构栈存区间的时候要牢记 后进先出 原则,贴近递归的写法:
- 先递归左区间:就得先入右区间,后入左区间,这样才能先取左区间来递归
- 先取end:先入begin
void QuickSortNonR(int* arr, int begin, int end) { ST st; StackInit(&st); //先入begin StackPush(&st, begin); //后入end StackPush(&st, end); while (!StackEmpty(&st)) { //先取end int right = StackTop(&st); StackPop(&st); //后取begin int left = StackTop(&st); StackPop(&st); if (left >= right)//1.只有一个值 2.区间非法 continue; int keyi = PartSort_Pointer(arr, left, right); //先入右区间 StackPush(&st, keyi + 1); StackPush(&st, right); //后入左区间 StackPush(&st, left);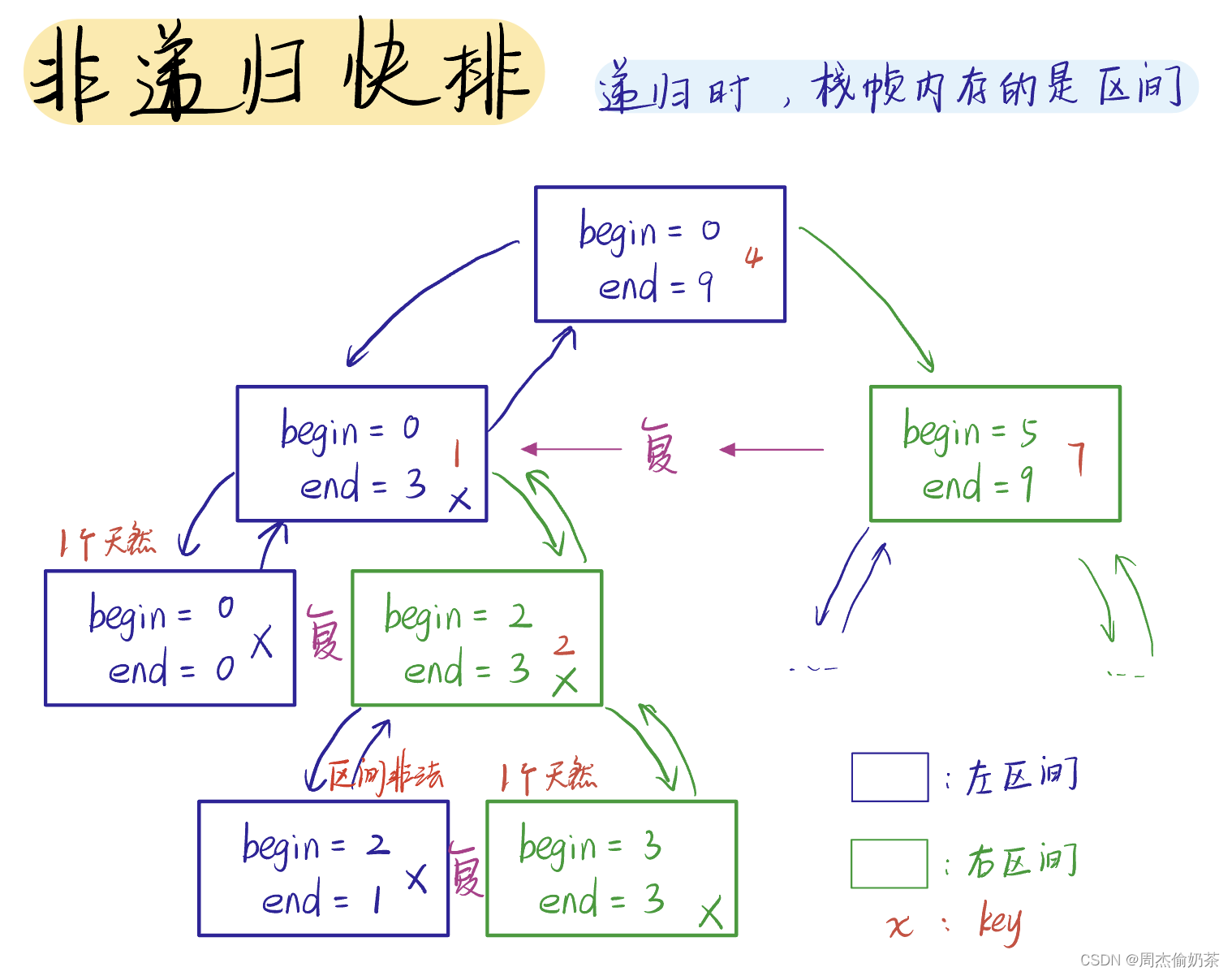 StackPush(&st, keyi - 1); } StackDestroy(&st); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
数据结构栈的实现可以看博主之前发的博客

归并排序
思想
分治思想,将两个已有序区间合并,并使之合并后仍然有序
-
左有序右有序:分解区间至一个数,往回归并
-
归并:对于两个有序区间,取小的尾插到tmp,再拷贝回原数组
*开辟额外数组来归并(可以在原数组进行尾插操作吗?不行,会把有效数据覆盖)

注:归并操作其实是往回返的,为了方便看就往下画了
操作
- 单趟排序:归并两个有序区间,使之合并后依然有序
- 整体趟数:递归到区间内只有一个数(最小规模),而后往回归并到最开始的左区间和右区间有序为止
void Merge(int* arr, int* tmp, int begin, int mid, int end) { //[beign, mid] [mid+1, end] int i = begin, j = mid + 1, k = begin; while (i <= mid && j <= end) { if (arr[i] <= arr[j]) tmp[k++] = arr[i++]; else tmp[k++] = arr[j++]; } while (i <= mid) tmp[k++] = arr[i++]; while (j <= end) tmp[k++] = arr[j++]; for (i = begin; i <= end; i++) arr[i] = tmp[i]; } void MergeSort(int* arr, int* tmp, int begin, int end) { if (begin >= end) return; //[beign, mid] [mid+1, end] int mid = begin + (end - begin) / 2; //左有序 MergeSort(arr, tmp, begin, mid); //右有序 MergeSort(arr, tmp, mid + 1, end); //归并 Merge(arr, tmp, begin, mid, end); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34

稳定性
归并取小的尾插,相等的时候左边的先插,就可以不变相对顺序,所有
稳定
复杂度
时间复杂度
每次接近二分,整体结构类似二叉树:高度h ~= log2n,每层尾插n次,所以归并排序的时间复杂度是
O(N*logN)
空间复杂度
待排序的元素有n个,就需要开辟n个空间,所以归并排序的空间复杂度是
O(n)
这也是归并排序的缺陷
归并非递归
思想
想改归并非递归,得先吃透递归的本质
归并的递归,就是 一一归,二二归,四四归…—— 先分解到最小规模,再往回归并
类似斐波那契数列的递归呢!要求第n个斐波那契数:第一个+第二个 ==> 第三个, 第二个+第三个 ==> 第四个,直接从最小规模起算
我们对归并非递归也试试
操作
- 给一个增量gap,代表每次要归并的规模
- 每趟排序按照gap,归整个数组
- 当gap >= sz,也就归并完成了
如何控制gap(规模)呢?


-
right= left + (gap - 1) :元素个数是 右闭 - 左闭 + 1,而gap代表归并的元素个数
right - left + 1 = gap ==> right = left + (gap-1)
-
j += 2*gap :每次是两组归并,+=2*gap 就是跳到单趟归并的下一组
严谨地看,此处计算的下标明显存在越界风险


遇到了非法区间
- 第一组部分越界(end1越界):没必要归并,[8]在原地等着最后的归并就行
- 第二组全部越界(begin2 end2越界):不存在的区间,不理会
- 第二组部分越界(end2越界):第二组区间内仍有有效数据,要往下归
void MergeSortNonR(int* arr, int left, int right, int* tmp) { //元素个数:右闭 - 左闭 + 1 int sz = right - left + 1; int gap = 1; while (gap < sz) { int j = 0; for (j = 0; j < sz; j += 2 * gap) { int left1 = j; int right1 = j + (gap - 1); int mid1 = left1 + (right1 - left1) / 2; int left2 = j + gap; int right2 = j + gap + (gap - 1); int mid2 = left2 + (right2 - left2) / 2; if (right1 >= sz) { break; } if (left2 >= sz) { break; } if (right2 >= sz) { right2 = sz - 1; } Merge(arr, left1, mid1, right1, tmp); Merge(arr, left2, mid2, right2, tmp); } gap *= 2; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- while(gap < sz)
- gap *= 2 :每次归并两组,所以规模翻倍

非比较排序
计数排序
思想
计数排序,是对哈希直接定址法的变形应用,开辟一块空间,将元素的值映射成空间的下标并计数
而映射也分直接映射和相对映射:
- 直接映射,待排序元素有N个,就开辟N个元素的空间
- 相对映射,根据待排序元素的最值,确定范围,根据范围开辟空间


操作
- 找最值 max min ,确定范围 range
- 开辟range个元素的空间 countArr
- 将待排序元素的值,相对映射成 countArr 的下标
- 将 countArr 中记录的次数,映射成值拷贝回数组
void CountSort(int* arr, int sz) { //遍历找出最大最小 //int max = INT_MIN; int max = arr[0]; //int min = INT_MAX; int min = arr[0]; int i = 0; for (i = 1; i < sz; i++) { if (arr[i] > max) max = arr[i]; if (arr[i] < min) min = arr[i]; } //确定范围range int range = max - min + 1; //开辟range个空间 int* countArr = (int*)calloc(range, sizeof(int)); assert(countArr); //相对映射:将值相对映射成下标 for (i = 0; i < sz; i++) { int index = arr[i] - min; countArr[index]++; } int j = 0; //将下标映射成值,拷贝 for (i = 0; i < range; i++) { while (countArr[i]--) arr[j++] = i + min; } free(countArr); countArr = NULL; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42

稳定性
稳定
复杂度
时间复杂度
求最值 O(N) + 相对映射 O(N) + 排序 O(rang)
O(N + range)
空间复杂度
O(range)
综上,数据范围集中时用计数排序十分合适
性能测试
void TestOp() { const int N = 100000 ; int* a1 = (int*)malloc(sizeof(int) * N); assert(a1); int* a2 = (int*)malloc(sizeof(int) * N); assert(a2); int* a3 = (int*)malloc(sizeof(int) * N); assert(a3); int* a4 = (int*)malloc(sizeof(int) * N); assert(a4); int* a5 = (int*)malloc(sizeof(int) * N); assert(a5); int* a6 = (int*)malloc(sizeof(int) * N); assert(a6); int* a7 = (int*)malloc(sizeof(int) * N); assert(a7); for (int i = 0; i < N; ++i) { a1[i] = rand() + i; a2[i] = a1[i]; a3[i] = a1[i]; a4[i] = a1[i]; a5[i] = a1[i]; a6[i] = a1[i]; a7[i] = a1[i]; } int begin1 = clock(); InsertSort(a1, N); int end1 = clock(); int begin2 = clock(); ShellSort(a2, N); int end2 = clock(); int begin3 = clock(); SelectSort(a3, N); int end3 = clock(); int begin4 = clock(); HeapSort(a4, N); int end4 = clock(); int begin5 = clock(); QuickSort(a5, 0, N - 1); //1.快排排有序数组,递归太深 //QuickSort(a4, 0, N - 1); //2.用三数取中优化 //QuickSort(a4, 0, N - 1); //3.小区间优化 //QuickSort(a4, 0, N - 1); int end5 = clock(); int begin6 = clock(); MergeSort(a6, N); int end6 = clock(); int begin7 = clock(); CountSort(a7, N); int end7 = clock(); printf("InsertSort:%d\n", end1 - begin1); printf("ShellSort:%d\n", end2 - begin2); printf("SelectSort:%d\n", end3 - begin3); printf("HeapSort:%d\n", end4 - begin4); printf("QuickSort:%d\n", end5 - begin5); printf("MergeSort:%d\n", end6 - begin6); printf("CountSort:%d\n", end7 - begin7); free(a1); free(a2); free(a3); free(a4); free(a5); free(a6); free(a7); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80

使用场景
遇事不决就快排,谁更优势就用谁
- 直接插入排序:较有序
- 希尔排序:较有序
- 选择排序:这家伙还是算了
- 堆排序:TopK(建堆已经O(N),消耗大)
- 冒泡排序:效率也太低
- 快速排序:综合起来非常好,能适应大多场景,效率也挺好
- 归并排序:主要是外排序(对内存外,如磁盘中的数据排序)
- 计数排序:数据的值跨度不大时极好
不知不觉数据结构初阶就学完了,不得不说这东西蛮有魅力的,继续前进吧
…
这里是培根的blog,期待与你共同进步!
下期见!
- 插入排序
-
相关阅读:
SPA项目开发之动态树+数据表格+分页
国产软件Bigemap与国产在线地图源<星图地球数据云>推动国内新GIS应用
第六届“中国法研杯”司法人工智能挑战赛进行中!
【网页设计】期末大作业html+css (个人生活记录介绍网站)
JavaWeb | HTTP 协议请求与响应格式
如何看待程序员领域内的“内卷”现象?
如何配置jupyter远程交互环境?
微服务feign组件学习
Typora 内网实现图片自动上传至 GitLab 个人图床
大家面试测试工程师一般问什么问题?
- 原文地址:https://blog.csdn.net/BaconZzz/article/details/126740832
