-
ROS1云课→20迷宫不惑之A*大法(一种虽古老但实用全局路径规划算法)
19提及的机器人如何实现全局路径规划?A*算法是一种可行的选择。
www.gamedev.net/reference/articles/article2003.asp
A*算法的基本介绍可以查询网络资源。这里,列出一些案例:
蓝桥ROS扩展笔记CppRobotics编译_zhangrelay的博客-CSDN博客
第一种:
- /*************************************************************************
- > File Name: a_star.cpp
- > Author: TAI Lei
- > Mail: ltai@ust.hk
- > Created Time: Sat Jul 20 12:38:43 2019
- ************************************************************************/
- #include
- #include
- #include
- #include
- #include
- #include
- #include
- #include
- using namespace std;
- class Node{
- public:
- int x;
- int y;
- float sum_cost;
- Node* p_node;
- Node(int x_, int y_, float sum_cost_=0, Node* p_node_=NULL):x(x_), y(y_), sum_cost(sum_cost_), p_node(p_node_){};
- };
- std::vector
- std::vector<float> rx;
- std::vector<float> ry;
- Node* node = goal;
- while (node->p_node != NULL){
- node = node->p_node;
- rx.push_back(node->x * reso);
- ry.push_back(node->y * reso);
- cv::rectangle(img,
- cv::Point(node->x*img_reso+1, node->y*img_reso+1),
- cv::Point((node->x+1)*img_reso, (node->y+1)*img_reso),
- cv::Scalar(255, 0, 0), -1);
- }
- return {rx, ry};
- }
- std::vector
- std::vector<int> ox, std::vector<int> oy,
- const int min_ox, const int max_ox,
- const int min_oy, const int max_oy,
- float reso, float vr,
- cv::Mat& img, int img_reso){
- int xwidth = max_ox-min_ox;
- int ywidth = max_oy-min_oy;
- std::vector
- for(int i=0; iint x = i + min_ox;for(int j=0; jint y = j + min_oy;for(int k=0; kfloat d = std::sqrt(std::pow((ox[k]-x), 2)+std::pow((oy[k]-y), 2));if (d <= vr/reso){obmap[i][j] = 1;cv::rectangle(img,cv::Point(i*img_reso+1, j*img_reso+1),cv::Point((i+1)*img_reso, (j+1)*img_reso),cv::Scalar(0, 0, 0), -1);break;}}}}return obmap;}bool verify_node(Node* node,vectorint min_ox, int max_ox,int min_oy, int max_oy){if (node->x < min_ox || node->y < min_oy || node->x >= max_ox || node->y >= max_oy){return false;}if (obmap[node->x-min_ox][node->y-min_oy]) return false;return true;}float calc_heristic(Node* n1, Node* n2, float w=1.0){return w * std::sqrt(std::pow(n1->x-n2->x, 2)+std::pow(n1->y-n2->y, 2));}std::vector
get_motion_model() {return {Node(1, 0, 1),Node(0, 1, 1),Node(-1, 0, 1),Node(0, -1, 1),Node(-1, -1, std::sqrt(2)),Node(-1, 1, std::sqrt(2)),Node(1, -1, std::sqrt(2)),Node(1, 1, std::sqrt(2))};}void a_star_planning(float sx, float sy,float gx, float gy,vector<float> ox_, vector<float> oy_,float reso, float rr){Node* nstart = new Node((int)std::round(sx/reso), (int)std::round(sy/reso), 0.0);Node* ngoal = new Node((int)std::round(gx/reso), (int)std::round(gy/reso), 0.0);vector<int> ox;vector<int> oy;int min_ox = std::numeric_limits<int>::max();int max_ox = std::numeric_limits<int>::min();int min_oy = std::numeric_limits<int>::max();int max_oy = std::numeric_limits<int>::min();for(float iox:ox_){int map_x = (int)std::round(iox*1.0/reso);ox.push_back(map_x);min_ox = std::min(map_x, min_ox);max_ox = std::max(map_x, max_ox);}for(float ioy:oy_){int map_y = (int)std::round(ioy*1.0/reso);oy.push_back(map_y);min_oy = std::min(map_y, min_oy);max_oy = std::max(map_y, max_oy);}int xwidth = max_ox-min_ox;int ywidth = max_oy-min_oy;//visualizationcv::namedWindow("astar", cv::WINDOW_NORMAL);int count = 0;int img_reso = 5;cv::Mat bg(img_reso*xwidth,img_reso*ywidth,CV_8UC3,cv::Scalar(255,255,255));cv::rectangle(bg,cv::Point(nstart->x*img_reso+1, nstart->y*img_reso+1),cv::Point((nstart->x+1)*img_reso, (nstart->y+1)*img_reso),cv::Scalar(255, 0, 0), -1);cv::rectangle(bg,cv::Point(ngoal->x*img_reso+1, ngoal->y*img_reso+1),cv::Point((ngoal->x+1)*img_reso, (ngoal->y+1)*img_reso),cv::Scalar(0, 0, 255), -1);std::vectorstd::vectorpath_cost[nstart->x][nstart->y] = 0;std::vectorox, oy,min_ox, max_ox,min_oy, max_oy,reso, rr,bg, img_reso);// NOTE: d_ary_heap should be a better choice hereauto cmp = [](const Node* left, const Node* right){return left->sum_cost > right->sum_cost;};std::priority_queuepq.push(nstart);std::vectormotion = get_motion_model(); while (true){Node * node = pq.top();if (visit_map[node->x-min_ox][node->y-min_oy] == 1){pq.pop();delete node;continue;}else{pq.pop();visit_map[node->x-min_ox][node->y-min_oy] = 1;}if (node->x == ngoal->x && node->y==ngoal->y){ngoal->sum_cost = node->sum_cost;ngoal->p_node = node;break;}for(int i=0; iNode * new_node = new Node(node->x + motion[i].x,node->y + motion[i].y,path_cost[node->x][node->y] + motion[i].sum_cost + calc_heristic(ngoal, node),node);if (!verify_node(new_node, obmap, min_ox, max_ox, min_oy, max_oy)){delete new_node;continue;}if (visit_map[new_node->x-min_ox][new_node->y-min_oy]){delete new_node;continue;}cv::rectangle(bg,cv::Point(new_node->x*img_reso+1, new_node->y*img_reso+1),cv::Point((new_node->x+1)*img_reso, (new_node->y+1)*img_reso),cv::Scalar(0, 255, 0));// std::string int_count = std::to_string(count);// cv::imwrite("./pngs/"+std::string(5-int_count.length(), '0').append(int_count)+".png", bg);count++;cv::imshow("astar", bg);cv::waitKey(5);if (path_cost[node->x][node->y]+motion[i].sum_cost < path_cost[new_node->x][new_node->y]){path_cost[new_node->x][new_node->y]=path_cost[node->x][node->y]+motion[i].sum_cost;pq.push(new_node);}}}calc_final_path(ngoal, reso, bg, img_reso);delete ngoal;delete nstart;// std::string int_count = std::to_string(count);// cv::imwrite("./pngs/"+std::string(5-int_count.length(), '0').append(int_count)+".png", bg);cv::imshow("astar", bg);cv::waitKey(5);};int main(){float sx = 10.0;float sy = 10.0;float gx = 50.0;float gy = 50.0;float grid_size = 1.0;float robot_size = 1.0;vector<float> ox;vector<float> oy;// add edgesfor(float i=0; i<60; i++){ox.push_back(i);oy.push_back(60.0);}for(float i=0; i<60; i++){ox.push_back(60.0);oy.push_back(i);}for(float i=0; i<61; i++){ox.push_back(i);oy.push_back(60.0);}for(float i=0; i<61; i++){ox.push_back(0.0);oy.push_back(i);}for(float i=0; i<40; i++){ox.push_back(20.0);oy.push_back(i);}for(float i=0; i<40; i++){ox.push_back(40.0);oy.push_back(60.0 - i);}a_star_planning(sx, sy, gx, gy, ox, oy, grid_size, robot_size);cin.ignore();return 0;}效果如下:

但是,需要通过修改代码,定位起点终点和障碍物等。
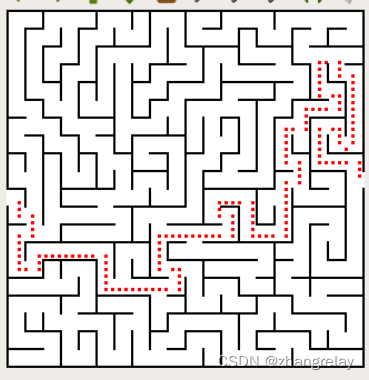
如何,解决下面这种迷宫呢(mazegenerator.net)?
迷宫有中杯,大杯,超大杯。
中杯版本如下:

大杯版本如下:

超超大杯版本:

咱就不玩超大号的了。
就用下面这个地图吧:
中:
大:

代码参考:
- #include
- #include
- #include
- #include
- #include
- #include
- using namespace cv;
- using namespace std;
- //
- Mat pool_max(Mat image_source, int size);
- Mat pool_min(Mat image_source, int size);
- int f(int x1,int x2,int z1,int z2);
- class A
- {
- private:
- int rate=6;
- int map[300][300];
- Mat m;
- //
- int tag_open=0,tag_close=0;
- //
- int map_root[300][300][2];
- //
- int x1;
- int x2;
- //
- int z1;
- int z2;
- //
- int way[1000][2];
- //
- //
- int close[24400][3];
- //
- int open[24400][4];
- public:
- //
- Mat image_source;
- //
- void deal_image();
- //
- void find_ori();
- //
- void deal_A();
- //
- void draw_road();
- };
- void A::draw_road()
- {
- Mat rgb;
- rgb=imread("maze.png",1);
- VideoWriter witer = VideoWriter("maze.avi",CV_FOURCC('M','P','4','2'),40,Size(image_source.cols,image_source.cols),1);//
- int mm=0;
- //
- while(1)
- {
- mm++;
- //
- for(int tag_a=4;tag_a<7;tag_a++)
- for(int tag_b=4;tag_b<7;tag_b++)
- for(int tag_c=0;tag_c<2;tag_c++)
- rgb.at
((map_root[z1][z2][0]*rate+tag_a),(map_root[z1][z2][1]*rate+tag_b))[tag_c%3]=0; - imshow("a",rgb);
- waitKey(1);
- z1=map_root[z1][z2][0];
- z2=map_root[z1][z2][1];
- //
- witer<printf("%d %d \n",z1,z2);//if(((z1==x1)&&(z2==x2))||mm>1000)break;}//imshow("a",rgb);witer.release();}void A::find_ori(){Mat image_b;GaussianBlur(image_source,image_b,Size(3,3),5);//for(int tag_a=0;tag_a{for(int tag_b=0;tag_bif(image_b.at
(tag_a,tag_b)>100)image_b.at (tag_a,tag_b)=255; else image_b.at(tag_a,tag_b)=0; }//for(int tag_b=0;tag_bif(image_b.at(tag_b,0)==255) {x1=tag_b/rate-1;x2=0;}for(int tag_b=0;tag_bif(image_b.at(tag_b,image_b.rows-1)==255) {z1=tag_b/rate-1;z2=(image_b.rows)/rate-1;}}void A::deal_image(){ //image_source = imread("maze.png",0);//Mat b;//GaussianBlur(image_source,b,Size(3,3),5);//for(int tag_a=0;tag_a{for(int tag_b=0;tag_bif(b.at(tag_a,tag_b)>100)b.at (tag_a,tag_b)=255; else b.at(tag_a,tag_b)=0; }////m=pool_min(pool_max(b,3),3);m=pool_min(b,6);//for(int tag_a=0;tag_a{for(int tag_b=0;tag_bif(m.at(tag_a,tag_b)>100)m.at (tag_a,tag_b)=255; else m.at(tag_a,tag_b)=0; }//imshow("c",m);//for(int tag_a=0;tag_afor(int tag_b=0;tag_bmap[tag_a][tag_b]=m.at(tag_a,tag_b); }void A::deal_A(){int keyy1=0,keyy2=0,keyy3=0,keyy4=0;map_root[z1][z2][0]=5;//close[0][0]=x1;close[0][1]=x2;tag_close++;//int com[2]={10000,0};while(1){//if(map[close[tag_close-1][0]][close[tag_close-1][1]+1]==255&&close[tag_close-1][0]>=0&&(close[tag_close-1][1]+1)>=0){ //closefor(int tag_a=0;tag_a{//if((close[tag_close-1][0])==open[tag_a][0]&&(close[tag_close-1][1]+1)==open[tag_a][1]){ ////open[tag_a][2]=close[tag_close-1][2]+1;keyy1=1;break;}if(keyy1==0){map_root[close[tag_close-1][0]][close[tag_close-1][1]+1][0]=close[tag_close-1][0];map_root[close[tag_close-1][0]][close[tag_close-1][1]+1][1]=close[tag_close-1][1];}keyy1=0;}//if(open[com[1]][3]==100000){open[com[1]][0]=close[tag_close-1][0];open[com[1]][1]=close[tag_close-1][1]+1;open[com[1]][2]=close[tag_close-1][2]+1;open[com[1]][3]=f(open[tag_open][0],open[tag_open][1],z1,z2);}else{//open[tag_open][0]=close[tag_close-1][0];open[tag_open][1]=close[tag_close-1][1]+1;open[tag_open][2]=close[tag_close-1][2]+1;open[tag_open][3]=f(open[tag_open][0],open[tag_open][1],z1,z2);tag_open++;}}if(map[close[tag_close-1][0]][close[tag_close-1][1]-1]==255&&close[tag_close-1][0]>=0&&(close[tag_close-1][1]-1)>=0){for(int tag_a=0;tag_a{if((close[tag_close-1][0])==open[tag_a][0]&&(close[tag_close-1][1]-1)==open[tag_a][1]){//open[tag_a][2]=close[tag_close-1][2]+1;keyy2=1;break;}if(keyy2==0){map_root[close[tag_close-1][0]][close[tag_close-1][1]-1][0]=close[tag_close-1][0];map_root[close[tag_close-1][0]][close[tag_close-1][1]-1][1]=close[tag_close-1][1];}keyy2=0;}if(open[com[1]][3]==100000){open[com[1]][0]=close[tag_close-1][0];open[com[1]][1]=close[tag_close-1][1]-1;open[com[1]][2]=close[tag_close-1][2]+1;open[com[1]][3]=f(open[tag_open][0],open[tag_open][1],z1,z2);}else{open[tag_open][0]=close[tag_close-1][0];open[tag_open][1]=close[tag_close-1][1]-1;open[tag_open][2]=close[tag_close-1][2]+1;open[tag_open][3]=f(open[tag_open][0],open[tag_open][1],z1,z2);tag_open++;}}if(map[close[tag_close-1][0]+1][close[tag_close-1][1]]==255&&(close[tag_close-1][0]+1)>=0&&(close[tag_close-1][1])>=0){for(int tag_a=0;tag_a{if((close[tag_close-1][0]+1)==open[tag_a][0]&&(close[tag_close-1][1])==open[tag_a][1]){//open[tag_a][2]=close[tag_close-1][2]+1;keyy3=1;break;}if(keyy3==0){map_root[close[tag_close-1][0]+1][close[tag_close-1][1]][0]=close[tag_close-1][0];map_root[close[tag_close-1][0]+1][close[tag_close-1][1]][1]=close[tag_close-1][1];}keyy3=0;}if(open[com[1]][3]==100000){open[com[1]][0]=close[tag_close-1][0]+1;open[com[1]][1]=close[tag_close-1][1];open[com[1]][2]=close[tag_close-1][2]+1;open[com[1]][3]=f(open[tag_open][0],open[tag_open][1],z1,z2);}else{open[tag_open][0]=close[tag_close-1][0]+1;open[tag_open][1]=close[tag_close-1][1];open[tag_open][2]=close[tag_close-1][2]+1;open[tag_open][3]=f(open[tag_open][0],open[tag_open][1],z1,z2);tag_open++;}}if(map[close[tag_close-1][0]-1][close[tag_close-1][1]]==255&&(close[tag_close-1][0]-1)>=0&&(close[tag_close-1][1])>=0){for(int tag_a=0;tag_a{if((close[tag_close-1][0]-1)==open[tag_a][0]&&(close[tag_close-1][1])==open[tag_a][1]){//open[tag_a][2]=close[tag_close-1][2]+1;keyy4=1;break;}if(keyy4==0){map_root[close[tag_close-1][0]-1][close[tag_close-1][1]][0]=close[tag_close-1][0];map_root[close[tag_close-1][0]-1][close[tag_close-1][1]][1]=close[tag_close-1][1];}keyy4=0;}if(open[com[1]][3]==100000){open[com[1]][0]=close[tag_close-1][0]-1;open[com[1]][1]=close[tag_close-1][1];open[com[1]][2]=close[tag_close-1][2]+1;open[com[1]][3]=f(open[tag_open][0],open[tag_open][1],z1,z2);}else{open[tag_open][0]=close[tag_close-1][0]-1;open[tag_open][1]=close[tag_close-1][1];open[tag_open][2]=close[tag_close-1][2]+1;open[tag_open][3]=f(open[tag_open][0],open[tag_open][1],z1,z2);tag_open++;}}com[0]=10000;com[1]=0;//for(int tag_a=0;tag_a{if((open[tag_a][2]+open[tag_a][3]){com[1]=tag_a;com[0]=open[tag_a][2]+open[tag_a][3];}}//close[tag_close][0]=open[com[1]][0];close[tag_close][1]=open[com[1]][1];//map_root[close[tag_close][0]][close[tag_close][1]][0]=close[tag_close-1][0];//map_root[close[tag_close][0]][close[tag_close][1]][1]=close[tag_close-1][1];//map[close[tag_close-1][0]][close[tag_close-1][1]]=0;//open[com[1]][3]=100000;tag_close++;//printf("\n %d %d\n",close[tag_close-1][0],close[tag_close-1][1]);//waitKey(5);if(map[z1][z2]==0)break;}}int f(int x1,int x2,int z1,int z2){return abs(x1-z1)+abs(x2-z2);}Mat pool_max(Mat image_source, int size){int rows = image_source.rows;int cols = image_source.cols;int tag_x=0,tag_y=0,tag1=0,tag2=0;int tag3[3]={0,0,0};Mat image_new(image_source.rows/size,image_source.cols/size,CV_8UC1);while(tag_x>=0&&tag_x<=rows-size)//{while(tag_y>=0&&tag_y<=cols-size){while(tag1>=0&&tag1<=size){while(tag2>=0&&tag2<=size){if(image_source.at(tag_x+tag1,tag_y+tag2)>tag3[1])(tag3[1]=image_source.at (tag_x+tag1,tag_y+tag2)); tag2++;}tag1++;tag2=0;}image_new.at(tag_x/size,tag_y/size)=tag3[1]; tag3[1]=0;tag_y+=size;tag1=0;tag2=0;}tag_x+=size;tag_y=0;tag1=0;tag2=0;}return image_new;}Mat pool_min(Mat image_source, int size){int rows = image_source.rows;int cols = image_source.cols;int tag_x=0,tag_y=0,tag1=0,tag2=0;int tag3[3]={0,0,0};Mat image_new(image_source.rows/size,image_source.cols/size,CV_8UC1);while(tag_x>=0&&tag_x<=rows-size)//{while(tag_y>=0&&tag_y<=cols-size-1){while(tag1>=0&&tag1<=size){while(tag2>=0&&tag2<=size){if(image_source.at(tag_x+tag1,tag_y+tag2) (tag_x+tag1,tag_y+tag2)); tag2++;}tag1++;tag2=0;}image_new.at(tag_x/size,tag_y/size)=tag3[1]; tag3[1]=255;tag_y+=size;tag1=0;tag2=0;}tag_x+=size;tag_y=0;tag1=0;tag2=0;}return image_new;}int main(){A a;a.deal_image();a.find_ori();a.deal_A();a.draw_road();cin.ignore();}
www.gamedev.net/reference/articles/article2003.asp
A*(发音为 A-star)算法对于初学者来说可能很复杂。虽然网上有很多解释 A* 的文章,但大多数都是为已经了解基础知识的人编写的。这篇文章是为真正的初学者准备的。
本文并不试图成为该主题的权威著作。相反,它描述了基础知识,并让准备好出去阅读所有其他材料并理解他们在说什么。本文末尾的进一步阅读下提供了一些最佳链接。
最后,本文不是特定于程序的。应该能够使这里的内容适应任何计算机语言。然而,正如所料,我在本文末尾提供了一个示例程序的链接。示例包包含两个版本:一个是 C++ 版本,一个是 Blitz Basic 版本。如果只想查看 A* 的运行情况,它还包含可执行文件。
将其从打开列表中删除并将其添加到关闭列表中。
检查所有相邻的方块。忽略那些在封闭列表中或无法行走(有墙壁、水或其他非法地形的地形)的那些,如果它们已经不在开放列表中,则将它们添加到开放列表中。使选定的方块成为新方块的“父级”。
如果相邻的方格已经在打开列表中,请检查通往该方格的这条路径是否更好。换句话说,如果我们使用当前方格到达那里,请检查该方格的 G 分数是否较低。如果没有,不要做任何事情。
另一方面,如果新路径的 G 成本较低,则将相邻方格的父方更改为选定方格(在上图中,将指针的方向更改为指向选定方格)。最后,重新计算该方格的 F 和 G 分数。如果这看起来令人困惑,您将在下面看到它。
将起始方块(或节点)添加到打开列表中。
重复以下操作:
a) 在开放列表中寻找最低的 F 成本方。我们将其称为当前方格。
b) 将其切换到关闭列表。
c) 对于与当前方格相邻的 8 个方格中的每一个 ...
如果它不可步行或在封闭列表中,请忽略它。否则请执行以下操作。
如果它不在打开列表中,请将其添加到打开列表中。使当前方格成为该方格的父方。记录正方形的 F、G 和 H 成本。
如果它已经在开放列表中,请使用 G 成本作为衡量标准,检查通往该方格的这条路径是否更好。较低的 G 成本意味着这是一条更好的路径。如果是,则将方块的父级更改为当前方块,并重新计算该方块的 G 和 F 分数。如果您保持您的开放列表按 F 分数排序,您可能需要借助该列表来说明更改。
将目标方块添加到封闭列表中,在这种情况下已找到路径(请参见下面的注释),或
找不到目标方格,打开列表为空。在这种情况下,没有路径。
保存路径。从目标方格向后工作,从每个方格到其父方格,直到到达起始方格。那是你的道路。注意:在本文的早期版本中,建议您可以在目标方格(或节点)已添加到打开列表而不是关闭列表时停止。这样做会更快,它几乎总是会给你最短的路径,但并非总是如此。这样做可能会产生影响的情况是,从第二个节点移动到最后一个节点到最后一个(目标)节点的移动成本可能会有很大差异 - 例如,在两个节点之间的河流交叉的情况下。
- 相关阅读:
java 自带命令
使用branch and bound分支定界算法选择UTXO
动态规划学习4:5 最长回文子串 三种方法
excel制作透视表
Pixel3系统提取镜像备份并还原到另一台手机
Vue---反向传值
【实战技能】初级软件开发工程师常见问题
【MySQL】操作表DML相关语句
Python+大数据-Spark技术栈(一) SparkBase环境基础
树的重心学习
- 原文地址:https://blog.csdn.net/ZhangRelay/article/details/126735454
