-
AutoSAR入门到精通讲解 (AppL) 2.1 AutoSAR-CP AppL概述
1. 概述
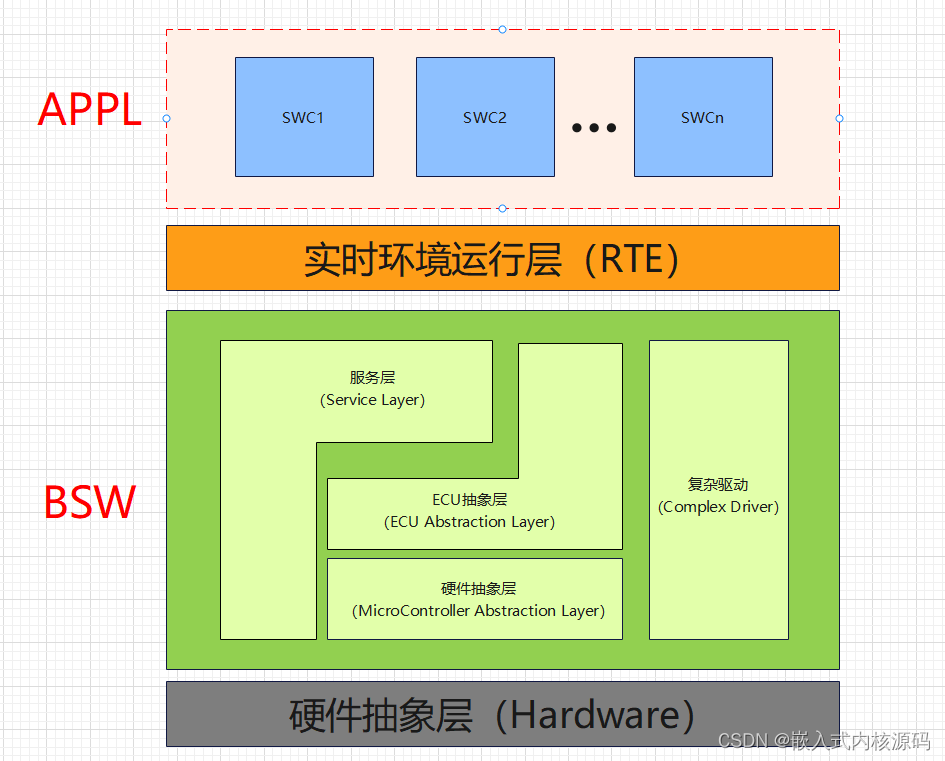
如下图是
AutoSAR-CP的整体框架,其中AppL在最上层,该章节就描述一下AppL的一些功能和介绍。
2. AppL的成员结构
AppL中最重要的就是SWC了,而SWC与其他SWC通信需要接口,每个SWC中又由runnable组成,所以AppL主要的组成就分下面三部分:- 应用软件组件(
SWC) AutoSAR标准接口(Port)和连接器(Connect)- 可运行实体(
Runnable)
3. SWC成员间的通信
如下图,
SWC成员之间不是直接通信的,它们之间的通信是通过虚拟功能总线(VBF)进行的。该总线是意义上的片内外通信的结合体,具体分为下列两部分:- 片内:在片内
SWC成员之间就是通过RTE通信,一个SWC可以把它理解为一个.c文件,.c文件之间的通信显然就只能通过全局变量去实现了。所以可以将ECU内部SWC的通信想象成全局变量去理解。 - 片外:片外很显然,肯定是通过物理总线去实现,在汽车电子中,目前应用最多的是
CAN Bus。 - 如下图所示:各个
SWC之间通过蓝色的线去通信,这个线可以把它当作上述描述的连接器(Connect,也就是上述所说的全局变量),其中,蓝色线的每个出口和入口都应该遵循标准的AutoSAR接口(Ports)。

4. SWC的分配
把上述的
5个SWC分配到两个ECU中(实际上汽车里面也是这么做的)。将车灯开关、调光控制器和左右顶灯(这里我只画了一个)放到一个ECU中由车身顶部的一个芯片控制;将左右车门开关(这里我只画了一个)和车门开关逻辑单元放到专用的车门ECU芯片中控制。那么还是先看图:

两个
ECU即为两个控制器,分别位于车身前部的车门控制器和位于车身顶部的顶灯控制器。ECU内部的SWC是通过RTE的管理来通信的;而跨ECU的通信就是通过外部总线(一般为CAN,就是车身上连接各ECU的CAN双绞线束)。 - 应用软件组件(
-
相关阅读:
Google共码未来 与 C站 创造者的经历
3 开源鸿蒙OpenHarmony4.1源码下载、编译,生成OHOS_Image可执行文件的最简易流程
Map的clear踩坑
Vue获取methods中方法的return返回值
【无App Push 通用测试方案
【Torch】Dataloader & torch.utils.data.DataLoader全面详实概念理解
前端导出word文件的多种方式、前端导出excel文件
聊聊 Libuv 最近引入的 io_uring
(最新版2022版)剑指offer之搜索算法题解
项目后端环境和前端环境的搭建
- 原文地址:https://blog.csdn.net/DSMGUOGUO/article/details/126728004