-
windows10下安装Mujoco 详细安装教程 + 附安装包
windows10下安装Mujoco 详细安装教程
MuJoCo 最初由美国华盛顿大学运动控制实验室主任、神经科学家 Emo Todorov 开发,于2015年通过创业公司 Roboti LLC , 被打造成了商业产品。2021年10月份后已开源,MuJoCo 的所有权从最初的 Roboti LLC 转为现在的 DeepMind ,但 Roboti LLC依然保留了原先旧版本 MuJoCo 的官网:http://roboti.us/index.html
该软件可用于强化学习 (Reinforcement Learning,RL) 算法的对比实验,机器人模型的仿真
完整安装包下载:https://download.csdn.net/download/yohnyang/86504311
另:关于机器人控制相关算法可以详见我的专栏:https://blog.csdn.net/yohnyang/category_11950508.html
1. Visual Studio Build Tools的安装


2. mujoco安装
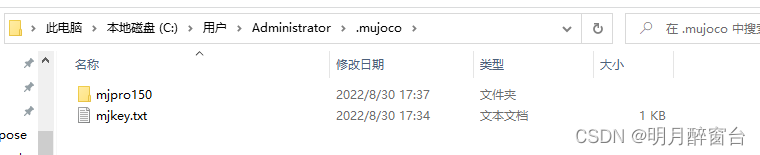
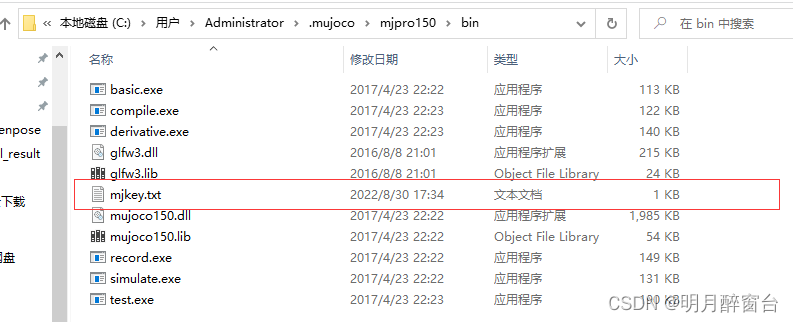
建立如下文件夹,并将文件解压、txt存放到对应位置

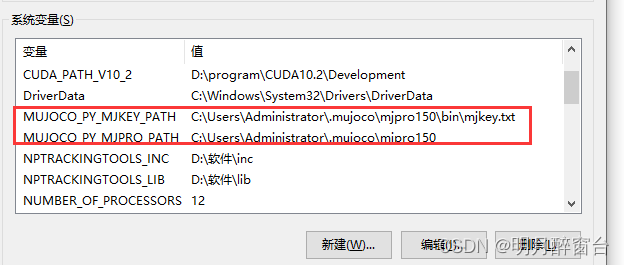
添加环境变量变量名:MUJOCO_PY_MJPRO_PATH 变量值:C:\Users\LENOVO-PC\.mujoco\mjpro150 变量名:MUJOCO_PY_MJKEY_PATH 变量值:C:\Users\LENOVO-PC\.mujoco\mjpro150\bin\mjkey.txt- 1
- 2
- 3
- 4
- 5
再在系统变量Path中添加如下:C:\Users\Administrator\.mujoco\mjpro150\bin C:\Users\Administrator\.mujoco\mjpro150 C:\Users\Administrator\.mujoco- 1
- 2
- 3
命令行cmd窗口打开测试mjpro仿真环境
>>>cd .mujoco\mjpro150\bin >>>simulate.exe ../model/humanoid.xml *** <<< MuJoCo Pro library version 1.50- 1
- 2
- 3
- 4

3. mujoco-py安装
命令行窗口:
conda info --envs #查看安装了哪些虚拟环境 conda create -n mujoco_py38 python=3.8.0 #新建虚拟环境- 1
- 2
下载mujoco-py包解压到该目录并修改名字为mujocopy50:

cd C:\Users\Administrator\.mujoco\mujocopy150 #进入目录 conda activate mujoco_py38 #激活虚拟环境 pip install -i https://pypi.tuna.tsinghua.edu.cn/simple -r requirements.txt #从清华源下载并安装相关依赖 pip install -i https://pypi.tuna.tsinghua.edu.cn/simple -r requirements.dev.txt #从清华源下载并安装相关依赖 python setup.py install #安装mujoco-py- 1
- 2
- 3
- 4
- 5
安装完成后使用Pycharm进行demo测试,测试代码如下:
import os import mujoco_py mj_path, _ = mujoco_py.utils.discover_mujoco() xml_path = os.path.join(mj_path, 'model', 'humanoid.xml') model = mujoco_py.load_model_from_path(xml_path) sim = mujoco_py.MjSim(model) print(sim.data.qpos) sim.step() print(sim.data.qpos)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- error:文件名或者扩展名过长:

- 解决:将mujocopy150文件夹中的mujoco复制到虚拟环境下的
.\Lib\site-packages目录下

并添加如下代码:
import os os.add_dll_directory("C:\\Users\\Administrator\\.mujoco\\mjpro150\\bin") os.add_dll_directory("C:\\Users\\Administrator\\.mujoco\\mujocopy150") import mujoco_py- 1
- 2
- 3
- 4
- 5
- 运行结果如下:

4. gym安装
命令行窗口激活环境,安装gym:
conda activate py37 pip install gym[mujoco]- 1
- 2
pycharm测试如下demo:
import gym env = gym.make('HalfCheetah-v4') #v4表示版本 env.reset() done = False while not done: _, _, done, _ = env.step(env.action_space.sample()) env.render() env.close()- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
5. urdf 格式转 xml进行仿真
- 在
urdf文件中做出如下修改:
<robot name=" "> <!--放到此处--!> <mujoco> <compiler meshdir="/home/lee/catkin_ws/src/sys/meshes/" balanceinertia="true" discardvisual="false" /> </mujoco>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
找到mujoco中的exe路径,将想要转换的urdf放到此处。。

#打开 cd .mujoco\mjpro150\bin #转换,不同版本命令可能不太一样,需要注意 compile.exe ./robot.urdf ./robot.xml #仿真 simulate.exe robot.xml- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
参考:
1.【Mujoco】在Win10下的安装
2. Win 10、Win 11 安装 MuJoCo 及 mujoco-py 教程 -
相关阅读:
GPS北斗时钟服务器(NTP网络时钟系统)施工部署方案
纯净版CentOS7设置ip
Synchronized 与 Lock 卖票问题、区别
【组成原理-存储】存储器的相关知识
HTML的学习-3|HTML 标签(下)
6.netty线程模型-Reactor
字符串哈希代码模板
Grafana系列-Loki-基于日志实现告警
23款奔驰E300L升级几何多光束大灯 车辆自检等功能
如何计算 GPT 的 Tokens 数量?
- 原文地址:https://blog.csdn.net/yohnyang/article/details/126609428