-
Zemax基础知识6--设计小知识
一、评价函数问题
--如果系统使用干涉仪或者MTF测试,常用波前差,相对参考质心
--如果使用CCD测试,则用点列图评价,相对参考质心
--无焦系统的测试方法将使用无焦直接输出,或将输出由一个辅助光学系统聚焦
--如果相差大于两个波长使用RMS SPOT,如果小于两个波长使用RMS WAVEFRONT
--MTF和圈入能量,与波前差相似,比较慢,一般在设计尾声使用
--PTV spot,波前,最小模糊圆
二、成本
如果可能,减少镜片或者使用塑胶材料代替玻璃材料。塑胶材料成型更简单,且可以量产
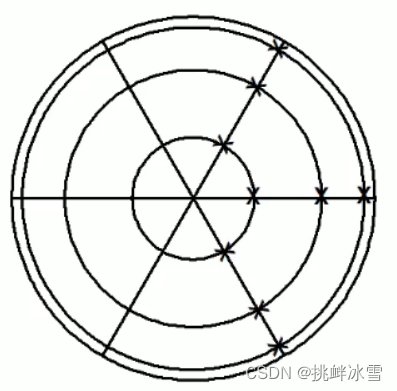
三、高斯求积算法
定义一些环分布的光线在环方向取样
利用n个环,可以将波前精确到r^(2n-1)阶
如果透镜具有旋转对称性效果会更好
就是几环几臂那个,如果对称性存在,只需追迹一部分
如果对称性不存在,我们设置的就是要 追迹 ( 环数 * 臂数 )条光线
四、矩形阵列算法
矩形阵列算法优点是能够准确计算表面孔径影响,缺点是速度慢
一般有遮拦孔径的系统可以使用矩形阵列,尤其是孔径不是圆形的。但是一般不要使用
五、参考点
一般选择以质心为参考点准确性更高,但计算量大
主光线为参考计算量小
六、像差平衡
有些变量在减少某些像差方面是无效的,所以减少有效自由度减小像差和最小光斑大小往往矛盾
七、剩余像差
--当一个设计优化好之后考虑剩余像差设计,但在评价函数中无法通过增加约束条件来减小像差
--可以用以下方法:放松约束、增加自由度、扩展面型、非球面、材料
八、求解功能
边缘光线角度决定F/#,F/#=0.5*NA=0.5*n*sinθm(θm为边缘光线角度)
边缘光线求解可以调整任何面(一般是最后一个玻璃到空气面)的曲率半径,在优化时,保持F/#固定,θm可以控制有效焦距
不能将依赖于光线追迹的SOLVE放在光阑前面
九、初始结构设计
--通过全局优化(下一篇内容我们展示一个这样的例子)
--现有技术、专利的数据库
-
相关阅读:
详述进程控制【Linux】
如何调整yolo混淆矩阵的大小,使其更加美观
【WP】猿人学13_入门级cookie
分享5个解决msvcp140.dll丢失的方法,全面解析msvcp140.dll丢失的原因
Fiddler抓包-只抓APP的请求
iOS 16.4更新指南:问题解答与新功能一览
Kratos战神微服务框架(二)
elasticsearch es 手动操作分片设置
实现Ubuntu交叉编译程序和Nvida Nano运行程序
腾讯云新客户优惠服务器88元/年,540元/3年,另有5年优惠服务器
- 原文地址:https://blog.csdn.net/lzy750750/article/details/126499515