-
毕业设计 STM32远程车锁控制系统 -物联网 单片机
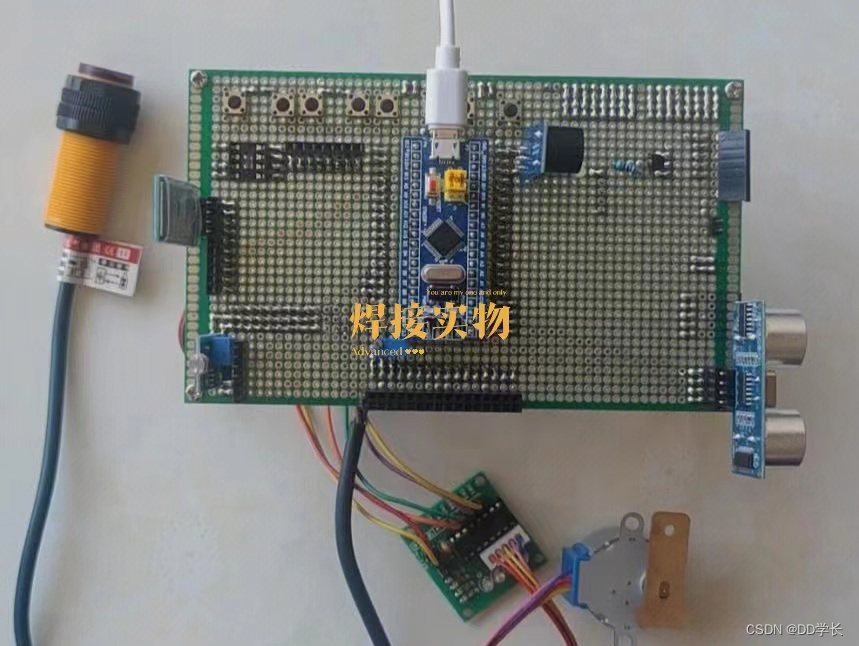
基于STM32远程车锁控制系统
停车场车位锁设计有蓝牙控制功能,
可以通过蓝牙控制启动开锁,用步进电机模拟,开锁之后当车进行倒车的时候,
可以将超声波采集到的距离数据发送给APP,另外当光敏电阻监测到比较暗的时候,会控制LED灯亮,给车照明。
车停好之后可以远程控制车锁上,电机模拟。
车锁之后如果光电管监测到有车要进入车位的时候,控制蜂鸣器报警提示。



// [主函数代码] #include "led.h" #include "delay.h" #include "sys.h" #include "usart.h" #include "hmi.h" #include "adc.h" #include "stdio.h" #include "string.h" #include "dht11.h" #include "stdlib.h" u8 table1[20]; u8 table2[20]; u8 table3[20]; u8 table4[20]; u8 table5[20]; u8 table6[20]; DHT11_Data_TypeDef DHT11_Data; int main(void) { u16 adcx; float temp; float value=2.5; delay_init(); //延时函数初始化 uart_init(9600); //串口初始化为9600 LED_Init(); //初始化与LED连接的硬件接口 Adc_Init(); //ADC初始化 DHT11_GPIO_Config(); HMISendstart(); while(1) { adcx=Get_Adc_Average(ADC_Channel_1,10); sprintf((char*)table1,"%d",adcx); HMISends("t3.txt=\""); //向串口屏发送电压值 HMISends(table1); HMISends("\""); HMISendb(0xff); temp=(float)adcx*(3.3/4096); sprintf((char*)table2,"%f",temp); HMISends("t4.txt=\""); //向串口屏发送电压值 HMISends(table2); HMISends("\""); HMISendb(0xff); if( Read_DHT11(&DHT11_Data)==SUCCESS) { LED0=!LED0; sprintf((char*)table3,"%d",DHT11_Data.humi_int); HMISends("t6.txt=\""); HMISends(table3); HMISends("\""); HMISendb(0xff); sprintf((char*)table4,"%d",DHT11_Data.temp_int); HMISends("t8.txt=\""); HMISends(table4); HMISends("\""); HMISendb(0xff); } if(USART_RX_STA&0x8000) { if(strcmp((char*)USART_RX_BUF,"moist")==0) { JDQ=0; delay_ms(1000); } else { value=atof((char*)USART_RX_BUF); } memset(USART_RX_BUF,0,sizeof(USART_RX_BUF)); USART_RX_STA=0; } if((temp>value)||(temp>2.5)) { JDQ=0; BEEP=0; } else { JDQ=1; BEEP=1; } delay_ms(250); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
源码:
https://blog.csdn.net/m0_71369066/article/details/126415022 -
相关阅读:
【pytorch】torch.gather()函数
Java Character.SubSet equals()方法具有什么功能呢?
MyBatis缓存
193页10万字一网统管解决方案2022
【运筹学】【如何使用Excel求解线性规划】
5W2H模拟
微信小程序发布流程
基于51单片机LCD声光音乐盒
2051. The Category of Each Member in the Store
【libxml2】v162 x64 MT 构建,包括依赖库libiconv
- 原文地址:https://blog.csdn.net/m0_71369066/article/details/126520453
