-
AD7793驱动程序(详细)
前言
AD7793是一款专门用来测温的芯片,功能强大。使用时MCU需要通过SPI通信总线配置AD7793使其工作,同时也需要SPI总线读取AD数据寄存器的数据。本文简单介绍SPI的通信时序、程序功能,如何简单的通过芯片手册成功配置AD7793芯片。
AD7793介绍
AD7793 是适合高精度测量应用的低功耗、低噪声的模拟/数字转换芯片,内置一个低噪声24 位Σ-Δ 型模拟数字转换器,其中含有3 个差分模拟输入,还集成了片内低噪声仪表放大器,因而可直接输入小信号。当增益设置为64、更新速率为4.17 Hz 时,均方根(RMS) 噪声为40 nV。采用2.7 ~ 5.25 V 电源供电,典型功耗为400 μA。
芯片内置一个精密低噪声、低漂移内部带隙基准电压源,也可采用外部差分基准电压。其它片内特性包括可编程激励电流源、熔断电流控制和偏置电压产生器。利用偏置电压产生器可将某一通道的共模电压设置为AVDD/2。
AD7793 可以采用内部或外部时钟工作,输出数据速率可通过软件编程设置,可在4.17 ~ 470 Hz 的范围内变化。内部结构框图如下

SPI总线
介绍
SPI是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便。
SPI分为主、从两种模式,一个SPI通讯系统需要包含一个(且只能是一个)主设备,一个或多个从设备。SPI接口的读写操作,都是由主设备发起。当存在多个从设备时,通过各自的片选信号进行管理。特点
传输速度较快但是没有指定的流控制,没有应答机制确认是否接收到数据;通常在使用SPI总线的时候STM32需要使用4根线和外设相连。以STM32上的SPI2为例:

NSS:片选设备线,每个从机都有自己的一条单独的总线与主机连接,此总线的作用就是为主机选择对应的从机进行传输数据,每个从机与主机之间的NSS总线互不相干。SPI中规定通信以NSS信号线拉低为开始,拉高为结束。
SCK:时钟信号线,因为SPI是同步通信,所以需要一根时钟信号线来统一主机和从机之间的数据传输,只有在有效的时钟信号下才能正常传输数据,不同设备支持的最高传输频率可能不一样,在传输过程中传输频率受限于低速的一方;SPI是串行通讯协议,数据一位一位进行传输,SCLK提供时钟脉冲,MISO、MOSI则基于此脉冲完成数据传输。
MOSI:(Master Output, Slave Input),顾名思义,MOSI就是主机输出/从机输入,因为SPI是全双工的通信总线,即主机和从机可以同时收发数据,这样的话就需要俩条线同时分别负责:主->从和从->主这俩条传输线路。而MOSI就专门负责主机向从机传输数据。
MISO:(Master Input,, Slave Output),与MOSI恰恰相反,MISO专门负责从机向主机传输数据。通信时序

以SPI通信时序图为例,通讯过程中所有的运作都是基于SCK时钟线进行,SPI通讯的起始和停止都是由NSS信号线控制,当NSS为低电平时表示起始信号,高电平则表示停止信号;SPI中使用MOSI和MISO来进行全双工传输数据,SCK来同步数据传输,即MOSI和MISO同时工作,在时钟信号线SCK为有效时对MOSI、MISO数据线进行采样,采到的信息即为传输的信息。
主设备和从设备之间需要处于同一种工作模式下,我们通常来说是通过配置主设备来满足从设备的模式要求,主要有四种工作模式;

主要通过时钟极性CPOL和时钟相位CPHA配置工作模式,详细信息请百度。STM32中SPI总线配置
void SPI1_Init(void) { /*分别定义两个结构体--------------------------*/ GPIO_InitTypeDef GPIO_InitStructure; SPI_InitTypeDef SPI_InitStructure; RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA, ENABLE );//PORTB时钟使能 RCC_APB2PeriphClockCmd( RCC_APB2Periph_SPI1, ENABLE );//SPI1时钟使能 /*配置SCK、MISO、MOSI引脚--------------------------*/ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //PB5/6/7复用推挽输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA /*配置CS片选引脚为普通的IO--------------------------*/ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA GPIO_SetBits(GPIOB,GPIO_Pin_4|GPIO_Pin_5|GPIO_Pin_6|GPIO_Pin_7); //PB5/6/7上拉 /*配置SPI1的工作模式(SPI1的方向,主从选择,数据长度,时钟极性、相位,NSS的选择,波特率的设置,高低位先行等)--------------------------*/ SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //设置SPI单向或者双向的数据模式:SPI设置为双线双向全双工 SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置SPI工作模式:设置为主SPI SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //设置SPI的数据大小:SPI发送接收8位帧结构 SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //串行同步时钟的空闲状态为高电平 SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //串行同步时钟的第二个跳变沿(上升或下降)数据被采样 SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号有SSI位控制 SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; //定义波特率预分频的值:波特率预分频值为256 SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始 SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值计算的多项式 SPI_Init(SPI1, &SPI_InitStructure); //根据SPI_InitStruct中指定的参数初始化外设SPIx寄存器 SPI_Cmd(SPI1, ENABLE); //使能SPI外设 SPI1_ReadWriteByte(0xff);//启动传输 } //SPI 速度设置函数 //SpeedSet: //SPI_BaudRatePrescaler_2 2分频 //SPI_BaudRatePrescaler_8 8分频 //SPI_BaudRatePrescaler_16 16分频 //SPI_BaudRatePrescaler_256 256分频 /* void SPI1_SetSpeed(u8 SPI_BaudRatePrescaler) { assert_param(IS_SPI_BAUDRATE_PRESCALER(SPI_BaudRatePrescaler)); SPI1->CR1&=0XFFC7; SPI1->CR1|=SPI_BaudRatePrescaler; //设置SPI1速度 SPI_Cmd(SPI1,ENABLE); } */ //SPIx 读写一个字节 //TxData:要写入的字节 //返回值:读取到的字节 uint8_t SPI1_ReadWriteByte(uint8_t TxData) { uint8_t retry=0; while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET) //检查指定的SPI标志位设置与否:发送缓存空标志位 { retry++; if(retry>200)return 0; } SPI_I2S_SendData(SPI1, TxData); //通过外设SPIx发送一个数据 retry=0; while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET) //检查指定的SPI标志位设置与否:接受缓存非空标志位 { retry++; if(retry>200)return 0; } return SPI_I2S_ReceiveData(SPI1); //返回通过SPIx最近接收的数据 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
SPI数据收发过程
1)发送数据时
把要发送的数据写到数据寄存器中,即数据总线上,然后放在发送缓冲器中,通过总线,并行传到移位寄存器里,然后串行从MOSI引脚移出。
当发送完一帧数据的时候,“状态寄存器 SR”中的“TXE 标志位”会被置 1,表示传输完一帧,发送缓冲区已空。注意要发送数据之前,必须往缓冲器里写数据才能发送,所以TXE要先清零再置位。
等待到“TXE标志位”为 1时,若还要继续发送数据,则再次往“数据寄存器 DR”写入数据即可
2)接收数据时
把MISO接收到的数据串行放在移位寄存器中,然后通过总线并行移到接收缓冲器里,然后放在数据总线上。
当接收完一帧数据的时候,“RXNE标志位”会被置 1,表示传输完一帧,接收缓冲区非空
“RXNE 标志位”为 1 时,通过读取“数据寄存器 DR”可以获取接收缓冲区中的内容。AD7793 寄存器配置
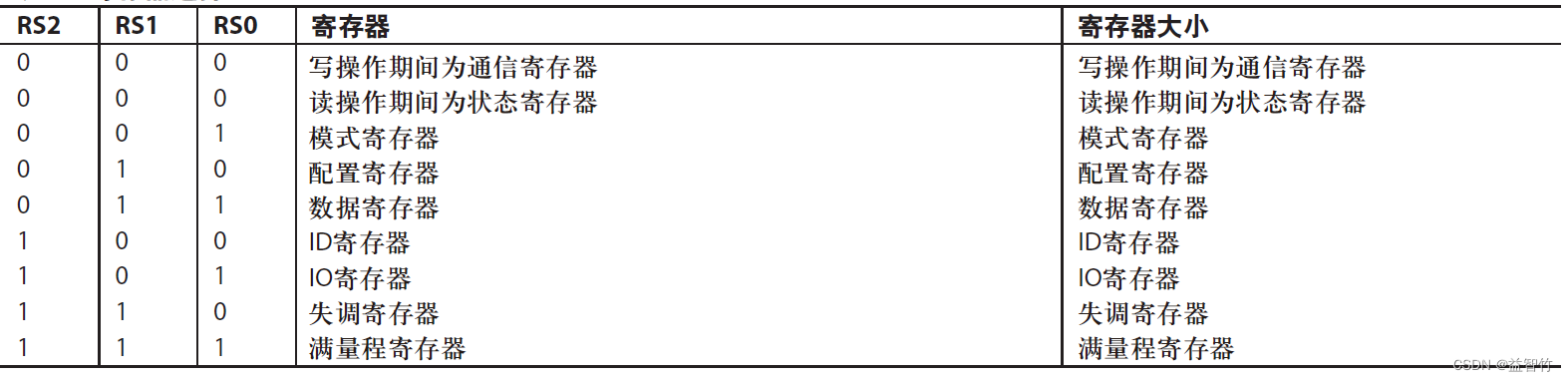
通信寄存器

由上表所示连续发送3次0xff重置AD芯片:void ResetAD7793()//复位ad7793 { CS=0; SPI1_ReadWriteByte(0xff);//写时为通讯寄存器/读时为状态寄存器 SPI1_ReadWriteByte(0xff); SPI1_ReadWriteByte(0xff); CS=1; delay_ms(10); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
重置之后通过下表去选择寄存器,在进行读取操作时需要将片选信号置0。

void AD7793_Init(void) { ResetAD7793(); /*写配置寄存器*/ CS=0; SPI1_ReadWriteByte(0x10);//写配置寄存器 SPI1_ReadWriteByte(0x10);//禁用偏置电压发生器、单极性模式,使用缓存模式 SPI1_ReadWriteByte(0x01);//配置外部基准电压源、检测通道2 delay_ms(2);- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
配置寄存器是一个16位的寄存器,由两个8位寄存器组成,分别表示高8位和低8位,所以要进行两次8位寄存器配置。以上代码为什么要禁用偏置电压,单极性和双极性有哪些区别,缓存是否设置详细都可以通过芯片手册查阅到。

/*写io口寄存器*/ SPI1_ReadWriteByte(0x28); //写入通信寄存器。下一步是写入IO寄存器。 SPI1_ReadWriteByte(0x03); //配置恒流源210ua,0x03 1ma电流 delay_ms(2);- 1
- 2
- 3
- 4
- 5
- 6
IO寄存器配置图如下

/*模式寄存器配置*/ SPI1_ReadWriteByte(0x08);// 配置模式寄存器,写通道寄存器 SPI1_ReadWriteByte(0x00);//设置模式寄存器为连续转换模式 SPI1_ReadWriteByte(0x09);// 0000 1001,内部时钟,clk脚不提供,更新速率16.7,对50HZ抑制80DB CS=1; delay_ms(2); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
找到模式寄存器之后,按照对照表进行配置,同样先配置高8位再配置低8位。

更新速率如下

通过以上配置AD芯片已经能够正常工作,接下来就是读取AD7793的数据/*获取到AD7793转换之后的值——————————————————————————————————————————*/ uint32_t GetAD7793() { uint8_t temp1,temp2,temp3;//每次读取8位,通过位与合成一个24位数据,那就直接定义成32位 uint32_t temp; /*读数据寄存器*/ CS=0; delay_us(5); SPI1_ReadWriteByte(0x40); //延时5us之后从状态寄存器中读取 status=SPI1_ReadWriteByte(0xff);//读取寄存器的状态 while(status & 0x80) { SPI1_ReadWriteByte(0x40); //从寄存器中读取 status=SPI1_ReadWriteByte(0xff); } SPI1_ReadWriteByte(0x58);//写入通信寄存器再从通信寄存器中读取 temp1=SPI1_ReadWriteByte(0xff); temp2=SPI1_ReadWriteByte(0xff); temp3=SPI1_ReadWriteByte(0xff); CS=1; delay_ms(2); temp=(temp1<<16)|(temp2<<8)| temp3; return temp; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
以上代码先找到状态寄存器,0100 0000,CR6置1读取时就是状态寄存器

读取一次记录此时的状态码,如果状态码第一位为1的话说明此时AD7793正在采样阶段,不能读取,当第一位为0时,找到数据寄存器进行读取,且每次读取8位,最终位与为一个24位数据,此数据就是AD转换之后的电压值。

此外为了检查AD芯片是否出现故障或损坏,可以通过读取ID的方式获取id值,故障状态下的id位0xff。uint8_t ReadID() { uint8_t byte=0; CS=0; SPI1_ReadWriteByte(0x60);//读ID byte=SPI1_ReadWriteByte(0xff); CS=1; return byte; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9

主函数里面SPI总线的初始化要在AD芯片初始化之前,while(1)循环中调用GetAD7793()就可以。 -
相关阅读:
鲜花销售小程序|基于微信小程序的鲜花销售系统设计与实现(源码+数据库+文档)
第十九章绘图
[项目管理-22]:项目中开环、闭环、安全、监控四种沟通模型:UDP/TCP/SCTP/PID模型
你想知道的do{...}while(0)的作用,都在这里了
5分钟制作可直接导入GPTs知识库中的自动爬虫
【MM32F5270开发板试用】快速移植STM32应用到MM32F5270(以OLED为例)
redis复制机制
正则表达式
cf 交互题
Hadoop3:MapReduce中实现自定义排序
- 原文地址:https://blog.csdn.net/m0_59592734/article/details/126323925
