-
window10环境下搭建ros
一、win10环境下在线搭建
1、编译器安装。
2、安装chocolatey
chocolatey是windows下的一个包管理工具,下载ros相关的包都采用这个工具。
安装过程:在菜单栏中搜索 x64 Native Tools Command Prompt for VS 2022 (2),然后右击选择管理员运行,输入:@"%SystemRoot%\System32\WindowsPowerShell\v1.0\powershell.exe" -NoProfile -InputFormat None -ExecutionPolicy Bypass -Command "iex ((New-Object System.Net.WebClient).DownloadString('https://chocolatey.org/install.ps1'))" && SET "PATH=%PATH%;%ALLUSERSPROFILE%\chocolatey\bin"- 1
3、安装Git
choco upgrade git -y- 1
4、ROS安装
确保您在C盘中有10GB的可用空间,用于安装ROS系统。
还是以管理员方式打开 x64 Native Tools Command Prompt for VS 2022 (2),依次输入:
mkdir c:\opt\chocolatey set ChocolateyInstall=c:\opt\chocolatey choco source add -n=ros-win -s="https://aka.ms/ros/public" --priority=1 choco upgrade ros-melodic-desktop_full -y --execution-timeout=0- 1
- 2
- 3
- 4
等待
5、创建ROS命令窗口快捷方式


找到VsDevCmd.bat 如:C:\Program Files (x86)\Microsoft Visual Studio\2022\Community\Common7\Tools\VsDevCmd.batC:\Windows\System32\cmd.exe /k "C:\Program Files (x86)\Microsoft Visual Studio\2022\Community\Common7\Tools\VsDevCmd.bat" -arch=amd64 -host_arch=amd64&& set ChocolateyInstall=c:\opt\chocolatey&& c:\opt\ros\melodic\x64\setup.bat- 1
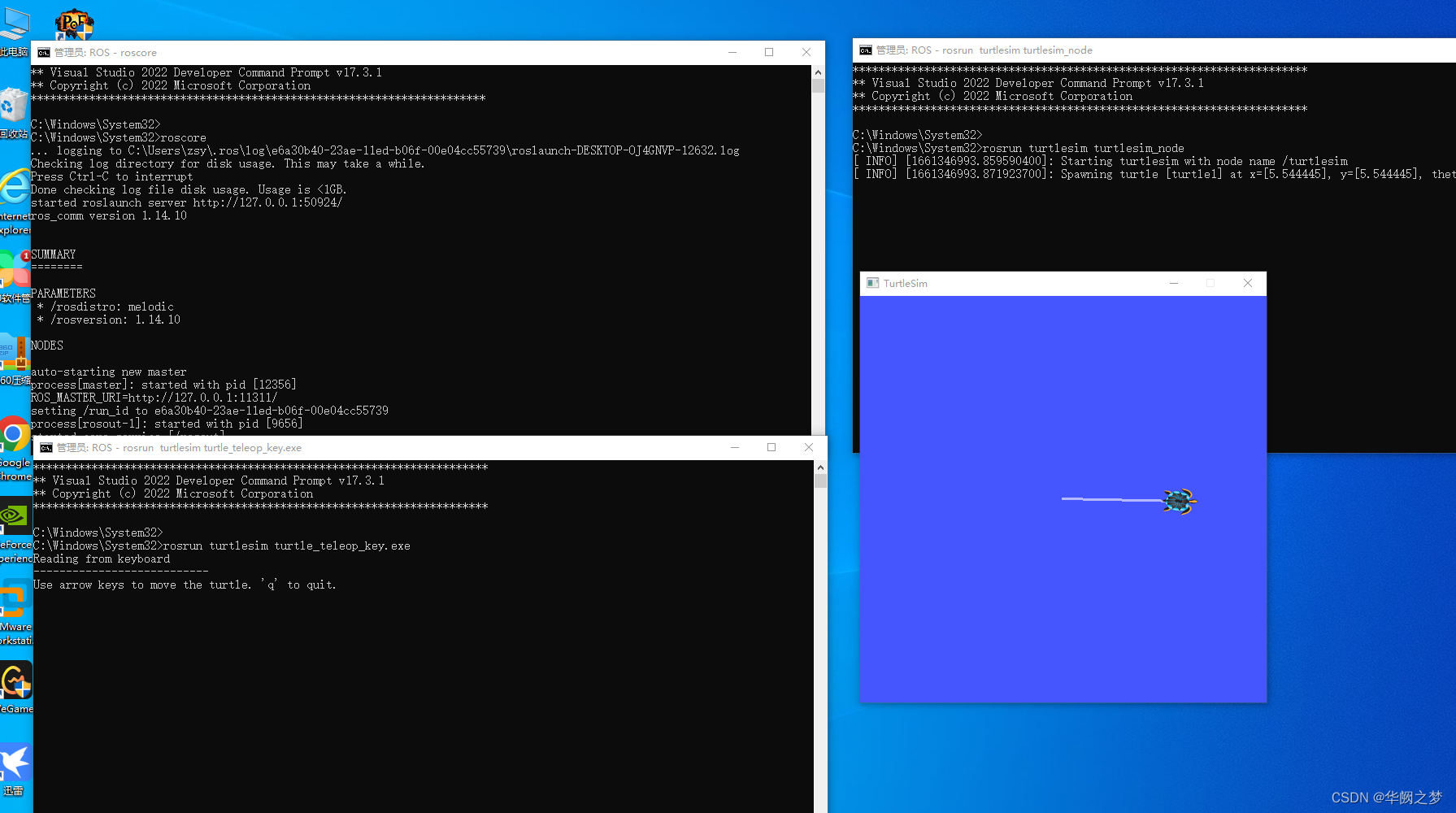
打开三个控制台分别输入如下命令后,出现小乌龟说明安装成功。
roscore rosrun turtlesim turtlesim_node rosrun turtlesim turtle_teleop_key.exe- 1
- 2
- 3
二、win10环境下在线搭建
1、编译器安装。略
2、安装chocolatey。略
3、安装Git。略
4、ROS安装
确保您在C盘中有10GB的可用空间,用于安装ROS系统。
1.离线包下载地址还是以管理员方式打开 x64 Native Tools Command Prompt for VS 2022 (2),依次输入:
mkdir c:\opt\chocolatey set ChocolateyInstall=c:\opt\chocolatey- 1
- 2
修改安装包搜索优先级,如图所示,是下载的nupkg文件所在的文件夹地址。
choco source add -n=ros-win -s=“E:\roswininstall” choco source remove -n=chocolatey choco source add -n=chocolatey -s"https://chocolatey.org/api/v2/" --priority=1 choco upgrade chocolatey-windowsupdate.extension choco upgrade ros-melodic-desktop_full -y --execution-timeout=0- 1
- 2
- 3
- 4
- 5
三、Linux安装
ubuntu各版本下载地址
ubuntu下载地址
vmware安装ubuntu时记得删除autoinst文件,否则会卡死
注:千万不要用20 版本的ubuntu系统问题很多,本人安装两天没成功。1、安装自适应桌面插件
sudo apt-get install open-vm-tools- 1
sudo apt-get install open-vm-tools-desktop- 1
如果上述两条指令安装失败则配置如下文件,再次尝试
- 打开source.list
sudo gedit /etc/apt/sources.list- 1
- 替换内容清华源
# 默认注释了源码镜像以提高 apt update 速度,如有需要可自行取消注释 deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial main restricted universe multiverse # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial main restricted universe multiverse deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-updates main restricted universe multiverse # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-updates main restricted universe multiverse deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-backports main restricted universe multiverse # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-backports main restricted universe multiverse deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-security main restricted universe multiverse # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-security main restricted universe multiverse # 预发布软件源,不建议启用 # deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-proposed main restricted universe multiverse # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ xenial-proposed main restricted universe multiverse- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
一定要配置下图不然不会下载成功

2、设置安装源
官方默认安装源:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'- 1
或来自国内清华的安装源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'- 1
或来自国内中科大的安装源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'- 1
3、设置密钥
这里可能有网络问题,换成手机热点就可以解决
gpg: 从公钥服务器接收失败:Server indicated a failure
可能是网络的原因,检查一下sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654- 1
4、安装
sudo apt update- 1
等待…
安装下1就不要安装2sudo apt install ros-noetic-desktop-full- 1
或者
安装下2就不要安装1sudo apt install ros-melodic-desktop-full- 1
5、设置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc source ~/.bashrc- 1
- 2
5、初始化rosdep
sudo rosdep init rosdep update- 1
- 2
6、安装构建依赖
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential- 1
参考文章
ubuntu取消锁屏
官方win10安装攻略
基于win10的vs2019的环境搭建
基于win10的vs2022的环境搭建
官方linux安装攻略
Linux环境搭建国内源配置
vmware环境搭建ros
linux公钥失败攻略
win10离线安装ros
win 环境下开发ros
win 环境下开发ros2
ROS2进阶:VS2019调试ROS2-examples程序 -
相关阅读:
python中的对象
面试题:项目中是如何使用ES(elasticsearch)的?如何优化的?数据量多少?
移动边缘计算终端如何赋能高校学习空间智慧管理
感恩节跟进技巧(附邮件模板)
java1.8新特性入门级讲解
【设计模式】Java设计模式 - 享元模式
Linux:今天学vim编辑器,gdb调试器,makefile项目自动化构建工具
网上赚钱的人其实都具备老板的思维
带头双向循环链表(最6的链表结构,数据结构必看)
软件测试工具
- 原文地址:https://blog.csdn.net/qq_41610493/article/details/126472989


