-
自动控制原理2.3---控制系统的结构图与信号流图
参考书籍:《自动控制原理》(第七版).胡寿松主编.
《自动控制原理PDF版下载》
1.系统结构图组成及绘制
- 控制系统的结构图和信号流图都是描述系统各元件间信号传递关系的数学图形,表示系统各变量间的因果关系及对各变量所进行的运算;
- 信号流图只适用于线性系统,结构图既适用于线性系统,也适用于非线性系统;
系统结构图的组成:
- 信号线:带有箭头的直线,箭头表示信号的流向,在直线旁标记信号的时间函数或象函数;
- 引出点(测量点):信号引出或测量的位置,从同一位置引出的信号在数值和性质方面完全相同;
- 比较点(综合点):对两个以上的信号进行加减运算,"+“表示相加,”-"表示相减;
- 方框(环节):对信号进行的数学变换,方框中是元部件或系统的传递函数;方框的输出变量等于方框的输入变量与传递函数的乘积,
C
(
s
)
=
G
(
s
)
U
(
s
)
C(s)=G(s)U(s)
C(s)=G(s)U(s);

结构图绘制:
- 考虑负载效应分别写出系统各元部件的微分方程或传递函数,并用方框表示;
- 根据各元部件的信号流向,用信号线依次将各方框连接,得到系统结构图;
- 注:结构图中的方框与实际系统的元部件不是一一对应的,一个实际元部件可以用一个方框或几个方框表示;一个方框可以表示几个元部件或一个子系统,或一个复杂系统;
实例分析:
Example1: 电压测量装置如下图所示, e 1 e_1 e1是待测量电压, e 2 e_2 e2是指示的电压测量值;如果 e 2 e_2 e2不同于 e 1 e_1 e1,产生误差电压 e = e 1 − e 2 e=e_1-e_2 e=e1−e2,经调制、放大后,驱动两相伺服电动机运转,并带动测量指针移动,直至 e 2 = e 1 e_2=e_1 e2=e1;此时指针指示的电压值即是待测量的电压值;绘制该系统的结构图。

解:系统由比较电路、机械调制器、放大器、两相伺服电动机及指针机构组成;
-
STEP1:考虑负载效应,分别列写各元部件的运动方程,并进行拉氏变换
-
比较电路: E ( s ) = E 1 ( s ) − E 2 ( s ) E(s)=E_1(s)-E_2(s) E(s)=E1(s)−E2(s);
-
调制器: U ~ ( s ) = E ( s ) U_{~}(s)=E(s) U~(s)=E(s);
-
放大器: U a ( s ) = K a E ( s ) U_a(s)=K_aE(s) Ua(s)=KaE(s);
-
两相伺服电动机:
M m = − C ω s Θ m ( s ) + M s , M s = C m U a ( s ) , M m = J m s 2 Θ m ( s ) + f m s Θ m ( s ) M_m=-C_{\omega}s\Theta_{m}(s)+M_s,M_s=C_mU_a(s),M_m=J_ms^2\Theta_m(s)+f_ms\Theta_m(s) Mm=−CωsΘm(s)+Ms,Ms=CmUa(s),Mm=Jms2Θm(s)+fmsΘm(s)- M m M_m Mm:电动机转矩;
- M s M_s Ms:电动机堵转转矩;
- U a ( s ) U_a(s) Ua(s):控制电压;
- Θ m ( s ) \Theta_m(s) Θm(s):电动机角位移;
- J m J_m Jm:折算到电动机轴上的总转动惯量;
- f m f_m fm:折算到电动机轴上的总黏性摩擦系数;
-
绳轮传动机构: L ( s ) = r Θ m ( s ) L(s)=r\Theta_m(s) L(s)=rΘm(s);
- r r r:绳轮半径;
- L L L:指针位移;
-
测量电位器: E 2 ( s ) = K 1 L ( s ) E_2(s)=K_1L(s) E2(s)=K1L(s); K 1 : K_1: K1:电位器传递系数;
-
-
STEP2:根据各元部件在系统中的工作关系,确定输入输出量,按照各自的运动方程分别画出每个元部件的方框图;

-
STEP3:用信号线按信号流向依次将各元部件的方框图连接,得到系统结构图

2.结构图的等效变换和简化
-
串联连接简化:n个方框串联连接的等效方框,等于各个方框传递函数乘积;
-
并联连接简化:n个方框并联连接的等效方框,等于各个方框传递函数代数和;
-
反馈连接简化:
Φ ( s ) = G ( s ) 1 ∓ G ( s ) H ( s ) \Phi(s)=\frac{G(s)}{1∓G(s)H(s)} Φ(s)=1∓G(s)H(s)G(s) -
比较点和引出点的移动:在移动前后必须保持信号的等效性,比较点和引出点之间一般不交换位置;"-"可以在信号线上越过方框移动,但不能越过比较点和引出点;

实例分析:Example2: 系统结构图如下,化简该系统结构图并求系统传递函数 C ( s ) / R ( s ) C(s)/R(s) C(s)/R(s);

解:
STEP1:化简系统结构图



STEP2:求传递函数
Φ ( s ) = C ( s ) R ( s ) = G 1 ( s ) G 2 ( s ) G 3 ( s ) G 4 ( s ) 1 + G 2 ( s ) G 3 ( s ) H 2 ( s ) + G 3 ( s ) G 4 ( s ) H 3 ( s ) + G 1 ( s ) G 2 ( s ) G 3 ( s ) G 4 ( s ) H 1 ( s ) \Phi(s)=\frac{C(s)}{R(s)}=\frac{G_1(s)G_2(s)G_3(s)G_4(s)}{1+G_2(s)G_3(s)H_2(s)+G_3(s)G_4(s)H_3(s)+G_1(s)G_2(s)G_3(s)G_4(s)H_1(s)} Φ(s)=R(s)C(s)=1+G2(s)G3(s)H2(s)+G3(s)G4(s)H3(s)+G1(s)G2(s)G3(s)G4(s)H1(s)G1(s)G2(s)G3(s)G4(s)
Tips:- 结构图简化的方法不止一种,步骤不尽相同;
- 如果题目不要求通过结构图简化来求传递函数,可以直接通过梅森增益公式来求解;
- 如果题目要求通过结构图化简来求传递函数,可以通过梅森增益公式来验证结果是否正确;
3.信号流图的组成及性质
说明:- 小圆圈:节点,表示方程式中的变量;
- 支路是连接两个节点的定向线段,用支路增益表示方程式中两个变量的因果关系;
- 典型信号流图说明:
- 上图由5个节点,8条支路组成;
- 5个节点: x 1 , x 2 , x 3 , x 4 , x 5 x_1,x_2,x_3,x_4,x_5 x1,x2,x3,x4,x5;
- 8条支路增益: a , b , c , d , e , f , g , 1 a,b,c,d,e,f,g,1 a,b,c,d,e,f,g,1;
信号流图基本性质:
- 节点标志系统的变量;
- 支路相当于乘法器;
- 信号在支路上只能沿箭头单向传递;
- 对于给定的系统,节点变量的设置是任意的,因此,信号流图不是唯一的;
信号流图常用术语:
- 源节点(输入节点):只有输出支路没有输入支路,一般代表系统的输入变量;
- 阱节点(输出节点):只有输入支路没有输出支路,一般代表系统的输出变量;
- 混合节点:既有输入支路也有输出支路;
- 前向通路:信号从输入节点到输出节点传递时,每个节点只通过一次的通路;前向通路上各支路增益乘积,称为前向通路总增益,用 p k p_k pk表示;
- 回路:起点和终点在同一节点,且信号通过每一节点不多余一次的闭合通路;回路中所有支路增益乘积,称为回路增益,用 L a L_a La表示;
- 不接触回路:回路之间没有公共节点,这种回路称为不接触回路;
4.信号流图的绘制
- 由系统微分方程绘制信号流图
- 写出含有微分方程或积分的线性方程;
- 对线性方程进行拉氏变换;
- 画信号流图;
- 由系统结构图绘制信号流图
- 从系统结构图绘制信号流图,在结构图的信号线上用小圆圈标志出传递的信号,得到节点;
- 用标有传递函数的线段代替结构图中的方框,得到支路;
实例分析:
Example3: 系统结构图如下所示,绘制相应的信号流图。

解:
STEP1:结构图上标注节点和支路

STEP2:绘制信号流图

注:- 支路增益为1的相邻两个节点,一般可以合并为一个节点,但对于源节点或阱节点不能合并;
- 在结构图比较点前没有引出点,可以在比较点后有引出点,只需在比较点后设置一个节点即可;
- 在比较点前有引出点,需要在引出点和比较点各设置一个节点,标志两个变量,支路增益为1;

5.梅森增益公式
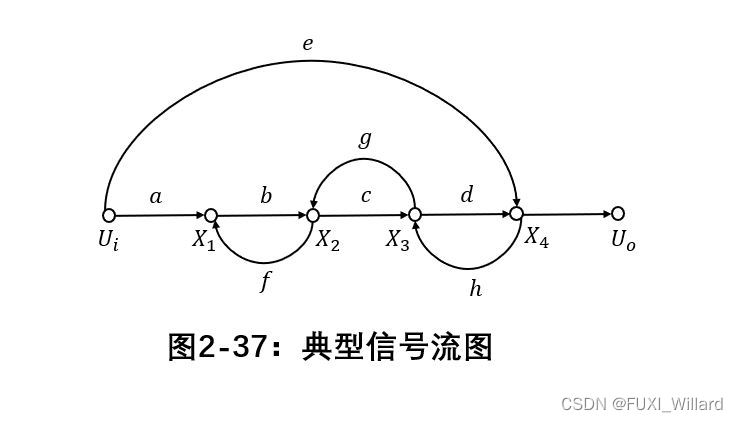
典型信号流图传递函数:
U o U i = X 4 X i = a b c d + e ( 1 − g c − b f ) 1 − d h − g c − f b + f b d h \frac{U_o}{U_i}=\frac{X_4}{X_i}=\frac{abcd+e(1-gc-bf)}{1-dh-gc-fb+fbdh} UiUo=XiX4=1−dh−gc−fb+fbdhabcd+e(1−gc−bf)
梅森增益公式:具有任意条前向通道及任意个单独回路和不接触回路的复杂信号流图,求取从任意源节点到任意阱节点之间的传递函数的梅森增益公式记作:
P = 1 Δ ∑ k = 1 n p k Δ k P=\frac{1}{\Delta}\sum_{k=1}^np_k\Delta{k} P=Δ1k=1∑npkΔk- P P P:从源节点到阱节点的传递函数(总增益);
- n n n:从源节点到阱节点的前向通路总数;
- p k p_k pk:从源节点到阱节点的第 k k k条前向通路总增益;
-
Δ
\Delta
Δ:流图特征式,
Δ
=
1
−
∑
L
a
+
∑
L
b
L
c
−
∑
L
d
L
e
L
f
+
⋯
+
\Delta=1-\sum{L_a}+\sum{L_bL_c}-\sum{L_dL_eL_f}+\dots+
Δ=1−∑La+∑LbLc−∑LdLeLf+⋯+
- ∑ L a \sum{L_a} ∑La:所有单独回路增益之和;
- ∑ L b L c \sum{L_bL_c} ∑LbLc:所有互不接触的单独回路中,每次取其中两个回路的回路增益的乘积之和;
- ∑ L d L e L f \sum{L_dL_eL_f} ∑LdLeLf:所有互不接触的单独回路中,每次取其中三个回路的回路增益的乘积之和;
- Δ k \Delta_k Δk:流图余因子式,等于流图特征式中除去与第 k k k条前向通路相接触的回路增益项以后的余项式;
实例分析:
Example4: 系统结构图如下,求系统的传递函数 C ( s ) / R ( s ) C(s)/R(s) C(s)/R(s);

解:由图可知:
-
该系统有两条前向通路,即: n = 2 , p 1 = G 1 G 2 G 3 , p 2 = G 1 G 4 n=2,p_1=G_1G_2G_3,p_2=G_1G_4 n=2,p1=G1G2G3,p2=G1G4;
-
该系统有五个单独回路,即: L 1 = − G 1 G 2 H 1 , L 2 = − G 2 G 3 H 2 , L 3 = − G 1 G 2 G 3 , L 4 = − G 4 H 2 , L 5 = − G 1 G 4 L_1=-G_1G_2H_1,L_2=-G_2G_3H_2,L_3=-G_1G_2G_3,L_4=-G_4H_2,L_5=-G_1G_4 L1=−G1G2H1,L2=−G2G3H2,L3=−G1G2G3,L4=−G4H2,L5=−G1G4;
-
没有不接触回路,且所有回路均与两条前向通路接触,因此: Δ 1 = Δ 2 = 1 \Delta_1=\Delta_2=1 Δ1=Δ2=1;
-
流图特征式: Δ = 1 − ( L 1 + L 2 + L 3 + L 4 + L 5 ) \Delta=1-(L_1+L_2+L_3+L_4+L_5) Δ=1−(L1+L2+L3+L4+L5);
-
由梅森增益公式可求得传递函数:
C ( s ) R ( s ) = 1 Δ ( p 1 Δ 1 + p 2 Δ 2 ) = G 1 G 2 G 3 + G 1 G 4 1 + G 1 G 2 H 1 + G 2 G 3 H 2 + G 1 G 2 G 3 + G 4 H 2 + G 1 G 4 \frac{C(s)}{R(s)}=\frac{1}{\Delta}(p_1\Delta_1+p_2\Delta_2)=\frac{G_1G_2G_3+G_1G_4}{1+G_1G_2H_1+G_2G_3H_2+G_1G_2G_3+G_4H_2+G_1G_4} R(s)C(s)=Δ1(p1Δ1+p2Δ2)=1+G1G2H1+G2G3H2+G1G2G3+G4H2+G1G4G1G2G3+G1G4 -
注:
- 如果题目不要求绘制出信号流图,可以直接应用梅森公式求解传递函数。
- 使用梅森增益公式需要特别注意回路的数目,容易漏某支路。
6.闭环系统的传递函数

参数说明:- R ( s ) R(s) R(s):有用输入作用,即输入信号;
- N ( s ) N(s) N(s):扰动作用;
- C ( s ) C(s) C(s):系统的输出信号;
有用输入和扰动对系统输出的影响
-
输入信号作用下的闭环传递函数
令 N ( s ) = 0 N(s)=0 N(s)=0,求得输入信号到输出信号之间的传递函数:
Φ ( s ) = C ( s ) R ( s ) = G 1 ( s ) G 2 ( s ) 1 + G 1 ( s ) G 2 ( s ) H ( s ) (1) \Phi(s)=\frac{C(s)}{R(s)}=\frac{G_1(s)G_2(s)}{1+G_1(s)G_2(s)H(s)}\tag{1} Φ(s)=R(s)C(s)=1+G1(s)G2(s)H(s)G1(s)G2(s)(1)
求得在输入信号下系统的输出量:
C ( s ) = Φ ( s ) R ( s ) = G 1 ( s ) G 2 ( s ) 1 + G 1 ( s ) G 2 ( s ) H ( s ) R ( s ) (2) C(s)=\Phi(s)R(s)=\frac{G_1(s)G_2(s)}{1+G_1(s)G_2(s)H(s)}R(s)\tag{2} C(s)=Φ(s)R(s)=1+G1(s)G2(s)H(s)G1(s)G2(s)R(s)(2) -
扰动作用下的闭环传递函数
令 R ( s ) = 0 R(s)=0 R(s)=0,求得扰动到输出信号之间的传递函数:
Φ n ( s ) = C ( s ) N ( s ) = G 2 ( s ) 1 + G 1 ( s ) G 2 ( s ) H ( s ) (3) \Phi_n(s)=\frac{C(s)}{N(s)}=\frac{G_2(s)}{1+G_1(s)G_2(s)H(s)}\tag{3} Φn(s)=N(s)C(s)=1+G1(s)G2(s)H(s)G2(s)(3)
求得在扰动下系统的输出量:
C ( s ) = Φ n ( s ) N ( s ) = G 2 ( s ) 1 + G 1 ( s ) G 2 ( s ) H ( s ) N ( s ) (4) C(s)=\Phi_n(s)N(s)=\frac{G_2(s)}{1+G_1(s)G_2(s)H(s)}N(s)\tag{4} C(s)=Φn(s)N(s)=1+G1(s)G2(s)H(s)G2(s)N(s)(4) -
输入信号和扰动同时作用时的输出
∑ C ( s ) = Φ ( s ) ⋅ R ( s ) + Φ n ( s ) ⋅ N ( s ) = G 1 ( s ) G 2 ( s ) R ( s ) + G 2 ( s ) N ( s ) 1 + G 1 ( s ) G 2 ( s ) H ( s ) (5) \sum{C(s)}=\Phi(s)·R(s)+\Phi_n(s)·N(s)=\frac{G_1(s)G_2(s)R(s)+G_2(s)N(s)}{1+G_1(s)G_2(s)H(s)}\tag{5} ∑C(s)=Φ(s)⋅R(s)+Φn(s)⋅N(s)=1+G1(s)G2(s)H(s)G1(s)G2(s)R(s)+G2(s)N(s)(5) -
闭环系统的误差传递函数
闭环系统在输入信号和扰动作用时,以误差信号 E ( s ) E(s) E(s)作为输出量时的传递函数称为误差传递函数。
Φ e ( s ) = E ( s ) R ( s ) = 1 1 + G 1 ( s ) G 2 ( s ) H ( s ) (6) \Phi_e(s)=\frac{E(s)}{R(s)}=\frac{1}{1+G_1(s)G_2(s)H(s)}\tag{6} Φe(s)=R(s)E(s)=1+G1(s)G2(s)H(s)1(6)Φ e n ( s ) = E ( s ) N ( s ) = − G 2 ( s ) H ( s ) 1 + G 1 ( s ) G 2 ( s ) H ( s ) (7) \Phi_en(s)=\frac{E(s)}{N(s)}=\frac{-G_2(s)H(s)}{1+G_1(s)G_2(s)H(s)}\tag{7} Φen(s)=N(s)E(s)=1+G1(s)G2(s)H(s)−G2(s)H(s)(7)
- 闭环系统传递函数分母形式均相同,均是同一个信号流图的特征式;
- 开环传递函数:等效于主反馈断开时,从输入信号 R ( s ) R(s) R(s)到反馈信号 B ( s ) B(s) B(s)之间的传递函数;
-
相关阅读:
程序设计原则
2.3 数据库-深入理解
iptables应用大全
springboot docker
Java程序员编写代码的技巧
【面试题精讲】如果一个类没有声明构造方法,该程序能正确执行吗?
网络编程入门
网络编程-套接字相关基础知识
深度学习——BRNN和DRNN
【BotR】CLR类型加载器设计
- 原文地址:https://blog.csdn.net/qq_39032096/article/details/126474986