-
数据结构——图
数据结构笔记目录:
1. 绪论、时间复杂度
2. 线性表
3. 树
4. 图
5. 查找
6. 排序
4.1 基本概念
不存在空图
-
顶点集一定非空
-
边集可以为空
图和树是逻辑上的区别,都是 逻辑结构
4.1.1 顶点的度
{ 无向图 ∑ i = 1 n T D ( v i ) = 2 e 有向图 ∑ i = 1 n T D ( v i ) = ∑ i = 1 n I D ( v i ) + ∑ i = 1 n O D ( v i ) ∑ i = 1 n I D ( v i ) = ∑ i = 1 n O D ( v i ) = e
⎩ ⎨ ⎧无向图有向图∑i=1nTD(vi)=2e∑i=1nTD(vi)=∑i=1nID(vi)+∑i=1nOD(vi)∑i=1nID(vi)=∑i=1nOD(vi)=e{ 无 向 图 ∑ i = 1 n T D ( v i ) = 2 e 有 向 图 ∑ i = 1 n T D ( v i ) = ∑ i = 1 n I D ( v i ) + ∑ i = 1 n O D ( v i ) ∑ i = 1 n I D ( v i ) = ∑ i = 1 n O D ( v i ) = e 4.1.2 图的种类
1. 简单图
- v i → v j v_i \rightarrow v_j vi→vj 间无重复边
- 任一顶点无自身到自身的顶点
2. n个顶点的完全图
{ 无向图 n ( n − 1 ) 2 条边 有向图 n ( n − 1 ) 条边
⎩ ⎨ ⎧无向图有向图2n(n−1)条边n(n−1)条边{ 无 向 图 n ( n − 1 ) 2 条 边 有 向 图 n ( n − 1 ) 条 边 3. 子图
顶点集为图G的子集
- 并非所有的顶点子集与边子集的组合都是图G的子图
- 任一条边及其两个端点都在的边集与顶点集的组合才构成子图
4. 连通图[无向图]
无向图连通:顶点 v → w v\rightarrow w v→w 直接有路径
图 G 中任两顶点间都连通
- 一点可以访问全部
- 若边数小于n-1,则一定是非连通图
- 连通分量:无向图中极大连通子图
- 生成树:连通图 的包含所有结点的极小连通子图
- 包含n-1条边,n个顶点
- 加一条边构成回路,减一条边为非连通图
- 生成森林:非连通图 的多个连通分量生成的多个树构成的森林
5. 路径&完全图
路径
v p → v q v_p \rightarrow v_q vp→vq 之间的顶点序列
- 路径长度:路径中的顶点个数
- 距离: v p → v q v_p \rightarrow v_q vp→vq 的最短路径长度
- 简单路径:顶点不重复
回路、环:起点和终点 ( v p = = v q v_p == v_q vp==vq) 相同的路径
- 简单回路:除首尾顶点不重复的路径
- 有拓扑序列的图一定无环
完全图
已知有n个顶点,确保连通的的最小边数为:n-1个顶点的完全图的边数+1, ( n − 1 ) ( n − 2 ) 2 + 1 \frac{(n-1)(n-2)}{2}+1 2(n−1)(n−2)+1
已知有n条边,组成非连通图的顶点数为:k个顶点组成完全图+1, k ( k − 1 ) 2 + 1 ⇒ ⌈ 2 n ⌉ + 1 \frac{k(k-1)}{2}+1\Rightarrow \lceil \sqrt{2n} \rceil+1 2k(k−1)+1⇒⌈2n⌉+1
6. 强连通图[有向图]
有向图连通: v ⇄ w v\rightleftarrows w v⇄w ,双向连通
每对顶点间有 路径
- 不是每对顶点间都有 弧
-
强连通分量
有向图中的极大强连通图
-
有向完全图一定是强连通图
4.2 图的存储
4.2.1 邻接矩阵法
1. 规则
- 表示
{ 无权图 取 0 或 1 带权图 w i j 或 0 或 ∞
{无权图带权图取0或1wij或0或∞{ 无 权 图 取 0 或 1 带 权 图 w i j 或 0 或 ∞ -
无向图
-
邻接矩阵对称且唯一
-
可进行压缩存储,只存放上(下)三角矩阵元素
对称矩阵默认为无向图
-
第i行(列)非零元素个数= v i v_i vi 的出度OD( v i v_i vi )或者入度ID( v i v_i vi )
-
-
有向图
- 第i行非零且非 ∞ \infty ∞ 的元素个数为顶点 v i v_i vi 的出度
- 第i列非零且非 ∞ \infty ∞ 的元素个数为顶点 v i v_i vi 的入度
2. 特点
-
适用于 稠密图 存储
-
空间复杂度为 O ( ∣ v ∣ 2 ) O(\mid v\mid^2) O(∣v∣2)
-
确定两点之间是否有边 O ( 1 ) O(1) O(1) ——数组的随机存取特性
确定图中边数 O ( ∣ v ∣ 2 ) O(\mid v\mid^2) O(∣v∣2)
-
某个顶点出度越大,则存储矩阵的行非零元素越多
-
图G的邻接矩阵为A,则 A n [ i ] [ j ] A^n[i][j] An[i][j] 表示从 v i → v j v_i \rightarrow v_j vi→vj 的长度为n的路径数量
3. 表示
typedef struct{ VexType Vex[MaxVertexNum];//顶点集 EdgeType Edge[MaxVertexNum][MaxVertexNum];//邻接矩阵表示边集 int vexnum,arcnum; }MGraph;- 1
- 2
- 3
- 4
- 5
4. 有向无环图的矩阵表示
有向无环图:非零元素集中在上三角或下三角区域,其对称区域全为0
- 图中比不存在环
- 一定存在拓扑序列但不唯一
上三角:出度大编号小
下三角:入度大编号小
4.2.2 邻接表法
邻接表法:只存出度
逆邻接表法:只存入度
邻接表:每个顶点 v 建立相应的边表
-
顶点头指针(顺序存储) :顶点头指针为边链表的头指针,指向与 v i v_i vi 关联的首条边
-
边信息(单链表)
无向图:依附于 v i v_i vi 的边
有向图:以 v i v_i vi 为尾的弧
1. 特点
-
适用于 稀疏图
-
邻接表 不唯一
同一顶点的边结点连接顺序不唯一,取决于建立边表的算法及边的输入序列
-
存储空间
无向图: O ( ∣ v ∣ + 2 ∣ e ∣ ) O(\mid v\mid+2\mid e\mid) O(∣v∣+2∣e∣)
有向图: O ( ∣ v ∣ + ∣ e ∣ ) O(\mid v\mid+\mid e\mid) O(∣v∣+∣e∣)
-
时间复杂度
找所有邻边:读顶点的边表—— O ( n ) O(n) O(n)
确定边是否存在:扫一个端点的边表—— O ( n ) O(n) O(n)
-
有向图某顶点的度
出度:邻接表中结点个数
入度:需遍历全部邻接表
2. 表示
typedef struct{ VexType data; ArcNode *firstArc; }VNode,AdList[MaxVertexNum];//邻接表 typedef struct{ int adjvex;//邻接点域 double weigh;//边表权值 struct ArcNode *nextArc;//邻接顶点 }ArcNode;//边表结点 typedef struct{ int vexnum; int arcnum; AdList vertices;//顶点头指针 }AGraph;- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16

4.2.3 邻接多重表
无向图的存储结构

4.2.4 十字链表法
有向图的存储结构

4.3 图的基本操作
独立于存储结构
参数相同;实现不同,性能不同
Adjacent(G,x,y);//x与y之间是否存在边 Neighbors(G,x);//x的邻接边 FirstNeighbor(G,x);//G中x的第一个邻接点 NextNerghbor(G,x,y);//G中除x的下一个邻接点 InsertVertex(G,x);//插入点 DeleteVertex(G,x);//删除点 AddEdge(G,x,y);//新增边 RemoveEdge(G,x,y);//移除边- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
已知n个顶点的图,其邻接矩阵表示为MGraph,邻接表表示为LGraph
-
判别图中边数 n(e)
n(x):表示x的个数
无向图 有向图 MGraph n ( e ) = n ( 1 ) 2 n(e)=\frac{n(1)}{2} n(e)=2n(1) n ( e ) = n ( 1 ) n(e)=n(1) n(e)=n(1) LGraph n ( e ) = n ( e N o d e ) 2 n(e)=\frac{n(eNode)}{2} n(e)=2n(eNode) n ( e N o d e ) n(eNode) n(eNode) -
判断两点是否连通
MGraph M G r a p h [ i ] [ j ] = ? 1 MGraph[i][j] \overset{?}{=}1 MGraph[i][j]=?1 O ( 1 ) O(1) O(1) LGraph 遍历顶点i的邻接表 O ( e ) O(e) O(e) -
度的计算
无向图 有向图 MGraph 2 ∗ 第 i 行 ′ 1 ′ 的个数 2*第 i 行 '1' 的个数 2∗第i行′1′的个数 出度:第 i 行 ‘1’ 的个数
入度:第 i 列 ‘1’ 的个数LGraph n(eNode) 出度:表头为 i 的单链表中 e N o d e 的个数 出度:表头为 i 的单链表中 eNode 的个数 出度:表头为i的单链表中eNode的个数
入度:边表中 i 的个数 入度:边表中 i 的个数 入度:边表中i的个数
4.3 图的遍历
从某一顶点出发,沿图中的边对图中所有顶点访问且只访问一次
-
遍历与经过的区别
从某一点出发经过图中所有结点 ≠ \neq = 遍历:每个结点不重复的访问一次
-
对每个顶点查找邻接点的过程取决于存储结构
矩阵: O ( ∣ v ∣ 2 ) O(\mid v\mid^2) O(∣v∣2)
邻接表: O ( ∣ e ∣ ) O(\mid e\mid) O(∣e∣)
-
树是一种特殊的图
4.3.1 广度优先搜索
从某一顶点 v 开始,由近到远访问和 v 有路径长度为1,2,3…的顶点
- 逐层访问,故需要借助队列
1. 实现
bool visted[MAX_VERTEX_NUM]; bool BFSTraverse(Graph G){ //初始化 for(int i = 0;i < G.vernum;++i) visited[i] = FALSE; InitQueue(Q); //BFS for(int i = 0;i < G.vexnum;++i) if(!visited[i]) BFS(G,i);//使用for循环确保每个连通分量都被访问 } void BFS(Graph G,int v){//从顶点v出发,广度优先遍历图G visit(v); visited[v] = TRUE; EnQueue(Q,v);//顶点v入队 while(!isEmpty(Q)){ DeQueue(Q,v); for(w = FirstNeighbor(G,v);w >= 0; w=NextNeighbor(G,v,w)){ //检测v的所有邻接点w if(!visited[w]){//w为v尚未访问的邻接点 visit(w); visited[w] = TRUE; EnQueue(Q,w); } } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
2. 性能分析
-
空间复杂度
O ( ∣ v ∣ ) O(\mid v\mid) O(∣v∣)
-
时间复杂度[与采取的存储方式有关]
-
邻接矩阵 O ( ∣ v ∣ 2 ) O(\mid v\mid^2) O(∣v∣2)
-
邻接表 O ( ∣ v ∣ + ∣ e ∣ ) O(\mid v\mid+\mid e\mid) O(∣v∣+∣e∣)
顶点入队 O ( ∣ v ∣ ) O(\mid v\mid) O(∣v∣)
搜索所有邻接点,访问边 O ( ∣ e ∣ ) O(\mid e\mid) O(∣e∣)
-
3. 应用
-
求 u → v u \rightarrow v u→v 路径长度最小的路径
-
无权图求单源点最短路径
void BFS_Min_Distance(Graph G,int u){ //d[i]表示从u到i的最短路径 for(i = 0;i < G.vexnum;++i) d[i] = INFINITE; visited[u] = TRUE; d[u] = 0; EnQueue(Q,u); while(!isEmpty(Q)){ DeQueue(Q,u);//BFS算法主过程 for(w = FirstNeighbor(G,u);w >= 0; w = NextNeighbor(G,u,w)){ if(!visited[w]){ visited[w] = TRUE;//设已访问标记 d[w] = d[u]+1; EnQueue(Q,w); } } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
-
广度优先生成树
邻接矩阵:表示法唯一 ⟹ \Longrightarrow ⟹ 生成树唯一
邻接表:表示法不唯一 ⟹ \Longrightarrow ⟹ 生成树不唯一
4.3.2 深度优先搜索
{ 图的邻接矩阵唯一 ⟹ 基于邻接矩阵的 D F S 、 B F S 序列唯一 图的邻接表不唯一 ⟹ 基于邻接表的 D F S 、 B F S 序列不唯一
{图的邻接矩阵唯一⟹基于邻接矩阵的DFS、BFS序列唯一图的邻接表不唯一⟹基于邻接表的DFS、BFS序列不唯一{ 图 的 邻 接 矩 阵 唯 一 ⟹ 基 于 邻 接 矩 阵 的 D F S 、 B F S 序 列 唯 一 图 的 邻 接 表 不 唯 一 ⟹ 基 于 邻 接 表 的 D F S 、 B F S 序 列 不 唯 一 DFS——递归算法,用一个递归工作栈,空间复杂度 O ( ∣ v ∣ ) O(\mid v\mid) O(∣v∣)
性能分析
-
时间复杂度
邻接矩阵 O ( ∣ v ∣ 2 ) O(\mid v\mid^2) O(∣v∣2)
邻接表 O ( ∣ v ∣ + ∣ e ∣ ) O(\mid v\mid+\mid e\mid) O(∣v∣+∣e∣)
-
空间复杂度
O ( ∣ v ∣ ) O(\mid v\mid) O(∣v∣)
bool visited[MAX_VERTEX_NUM];//访问标记数组 void DFSTraverse(Graph G){ for(v = 0;v < G.vexnum;++v) //初始化 visited[v] = FALSE; for(v = 0;v < G.vexnum;++v)//遍历所有连通分量 if(!visited[v]) DFS(G,v); } void DFS(Graph G,int v){ visit(v); visited[v] = TRUE;//访问v并做标记 for(w = FirstNeighbor(G,v);w >= 0; w = NextNeighbor(G,v,w)){ if(!visited[w]) DFS(G,w); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
4.3.3 图的遍历与连通性
-
连通
- 无向图:从某一顶点 v 出发,一次遍历可访问图中所有顶点
- 有向图:初始点到图中每个顶点都有路径
-
连通分量个数
DFSTraverse/BFSTraverse中调用DFS/BFS次数为连通分量数
- 对一个有向无环图,
DFSTraverse的退栈序列就是一个拓扑序列

4.4 应用
4.4.1 最小生成树
-
边数 = 顶点数 - 1
-
带权连通图权值和最小
最小权值和唯一,但树形不唯一
若各边权值互不相等,则树形唯一
Generate_MST(Graph G){ T = NULL; while T未形成树 do 找最小代价边(u,v)且加入T后不形成回路 T = T ∪ (u,v); }- 1
- 2
- 3
- 4
- 5
- 6
1. 深度优先、广度优先生成树

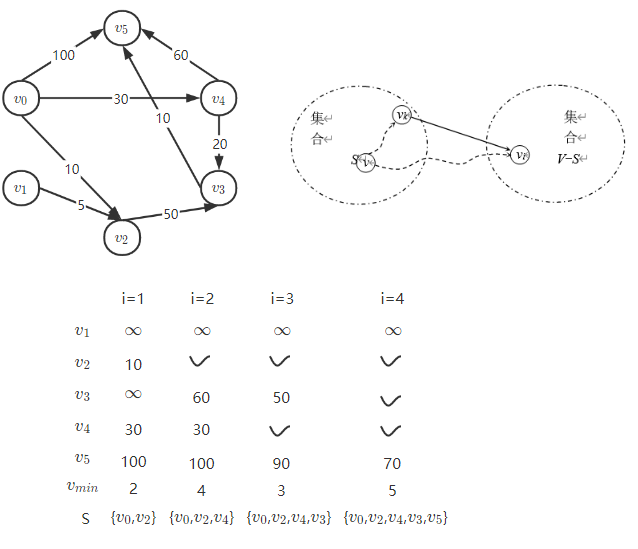
2. Prim算法
选点:Prime——Point
手动模拟

实现
void Prim(G,T){ T = ∅;//初始化为空集 U = {'a'};//MST的顶点集 while((V-U) != ∅){ 设(u,v)是使 u∈U与v∈V,且权值最小的边; T = T∪{(u,v)}; U = U∪{v}; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
时间复杂度: O ( ∣ v ∣ 2 ) O(\mid v\mid^2) O(∣v∣2) ,故不依赖于边集,适用于稠密图
3. Kruskal算法

void Kruskal(G,T){ T = V;//初始化树,仅含顶点 numS = n;//连通分量数 while(numS > 1){//若连通分量数大于1 从E中取出权值最小的边(v,w); if(v和u属于不同连通分量){ T = T∪{(v,u)};//将此边加入生成树中 numS--; } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
时间复杂度: O ( ∣ e ∣ l o g ∣ e ∣ ) O(\mid e\mid log\mid e\mid) O(∣e∣log∣e∣) ,适用于点多边少
4.4.2 最短路径
带权路径长度:路劲上权值的和
- 满足连通的 u → v u \rightarrow v u→v
- 找所有 u → v u \rightarrow v u→v 中权值最小的路径
区别:
Dijkstra: 单源点最短路径Floyd: 多源点最短路径1. Dijkstra
void Dijkstra(MGraph G,int v0,Patharc P,ShortPathTable D){ int flag[MAXVEX];//访问标记数组 0-未访问 1-已访问 for(int i = 0;i < G.numVertices;++i){ flag[i] = 0; D[i] = G.arc[v0][i];//D[]为距离数组 P[i] = 0;//P[i]为到达vi的路径长度 } D[v0] = 0,flag[v0] = 1,P[0] = 0; for(int i = 0;i < G.numVertices;++i){ int min = INFINITY;//记录当前距离最小值 int idx;//记录距离最小值下标 for(int j = 0;j < G.numVertices;++j)//查找距离v0最近的点 if(!flag[j] && D[j] < min){//vj未被访问且距离最小 idx = j; min = D[j]; } flag[idx] = 1; for(int w = 0;w < G.numVertices;++w)//更新各顶点最小距离 if(!flag[w] && (min + G.arc[idx][w] < D[w])) D[w] = min + G.arc[idx][w]; P[i+1] = idx; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
2. Floyd

A ( 0 ) = [ 0 6 13 10 0 4 / 19 5 15 / ∞ 0 ] = [ 0 6 13 10 0 4 5 15 0 ] P A T H ( 0 ) = [ a b a c b a b a c / b c c a c a b / c b ] = [ a b a c b a b c c a c a b ]
A(0)=⎣ ⎡01056015/∞134/190⎦ ⎤=⎣ ⎡010560151340⎦ ⎤PATH(0)=⎣ ⎡bacaabcab/cbacbac/bc⎦ ⎤=⎣ ⎡bacaabcabacbc⎦ ⎤A ( 0 ) = [ 0 6 13 10 0 4 / 19 5 15 / ∞ 0 ] = [ 0 6 13 10 0 4 5 15 0 ] P A T H ( 0 ) = [ a b a c b a b a c / b c c a c a b / c b ] = [ a b a c b a b c c a c a b ] A ( 1 ) = [ 0 6 10 / 13 10 0 4 5 / ∞ 15 0 ] = [ 0 6 13 10 0 4 5 15 0 ] P A T H ( 1 ) = [ a b a b c / a c b a b c c b a / c a c a b ] = [ a b a c b a b c c a c a b ]
A(1)=⎣ ⎡0105/∞601510/1340⎦ ⎤=⎣ ⎡010560151340⎦ ⎤PATH(1)=⎣ ⎡bacba/caabcababc/acbc⎦ ⎤=⎣ ⎡bacaabcabacbc⎦ ⎤A ( 1 ) = [ 0 6 10 / 13 10 0 4 5 / ∞ 15 0 ] = [ 0 6 13 10 0 4 5 15 0 ] P A T H ( 1 ) = [ a b a b c / a c b a b c c b a / c a c a b ] = [ a b a c b a b c c a c a b ] A ( 2 ) = [ 0 ∞ / 6 13 9 / 10 0 4 5 15 0 ] = [ 0 6 13 9 0 4 5 15 0 ] P A T H ( 2 ) = [ a c b / a b a c b c a / b a b c c a c a b ] = [ a b a c b c a b c c a c a b ]
A(2)=⎣ ⎡09/105∞/60151340⎦ ⎤=⎣ ⎡09560151340⎦ ⎤PATH(2)=⎣ ⎡bca/bacaacb/abcabacbc⎦ ⎤=⎣ ⎡bcacaabcabacbc⎦ ⎤A ( 2 ) = [ 0 ∞ / 6 13 9 / 10 0 4 5 15 0 ] = [ 0 6 13 9 0 4 5 15 0 ] P A T H ( 2 ) = [ a c b / a b a c b c a / b a b c c a c a b ] = [ a b a c b c a b c c a c a b ] 4.4.3 有向无环图
有向无环图:一个有向图中无环,简称DAG
用于描述公共子式
- 符号最多为二元运算符
- 出现多少种运算数就多少个叶结点

4.4.4 拓扑排序
在一个有向无环图的顶点组成的序列中
- 每个顶点出现且只出现一次
- 若顶点A在序列中排在顶点B前面,则在图中不存在B->A的路径
对有向无环图的一种排序,若存在一条顶点A到顶点B的路径,则在排序中顶点B出现在顶点A的后面。
1. AOV
AOV(用顶点表示活动):若用DAG表示一个工程,顶点表示活动,有向边 < v i , v j >
- v i v_i vi 是 v j v_j vj 的直接前驱, v j v_j vj 是 v i v_i vi 的直接后继,具有传递性
- 任何活动 v i v_i vi 都不能以自身作为前驱或者后继

2. 拓扑排序步骤
-
每次从AOV中选一个没有前驱(入度=0)的顶点输出
-
从AOV网中删除该顶点和以该顶点为起点的所有边
-
重复 1. 2. 直至当前的AOV为空或当前网中不存在无前驱的顶点
若AOV为空,则该图存在拓扑序列
若AOV不空,则该图不存在拓扑序列

3. 拓扑排序实现
bool TopologicalSort(Graph G){ InitStack(S);//初始化栈,存储入度为0的顶点 for(int i = 0;i < G.vexnum;++i) if(indegree[i] == 0) Push(S,i);//将所有入度为0的顶点入栈 int count = 0;//表示已经输出的顶点数 while(!IsEmpty(S)){ Pop(S,i);//栈顶元素出栈 print[count++] = i;//输出顶点i for(p = G.vertices[i].firstarc;p;p = p->nextarc){ //将所有i指向的顶点入度减1并将入度为0的顶点压栈 v = p->adjvex;//v是p的邻接点 if(!(--indegree[v])) Push(S,v);//入度为0则入栈 } } if(count < G.vexnum) return false;//排序失败,有向图有回路 else return true;//存在拓扑序列 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
-
时间复杂度: O ( ∣ v ∣ + ∣ e ∣ ) O(\mid v\mid+\mid e\mid) O(∣v∣+∣e∣)
-
入度为零的顶点,即没有前驱活动的或前驱活动全部完成的顶点,工程可以从这个顶点所代表的活动开始或继续
-
若一个顶点有多个直接后继,则拓扑序列不唯一
-
AOV网中各个顶点地位相同,故可重新编号,若是DAG则其邻接矩阵是三角矩阵
4.4.5 关键路径
1. AOE
有向无环图中,顶点表示事件,有向边表示活动,边上权值表示完成该活动的开销。用边表示活动的图为AOE。
- 只有在顶点所代表的事件发生后,从该顶点出发的有向边代表的活动才能开始
- 只有在进入某顶点各有向边所代表的活动完成后,该顶点所代表的事件才能发生
- AOE网中,只有一个入度为0的顶点(源点),表示整个工程开始;一个出度为0的顶点(汇点),表示整个工程结束

拓扑序列: v 1 , v 2 , v 3 , v 4 , v 5 , v 5 , v 6 , v 7 , v 8 , v 9 v_1,v_2,v_3,v_4,v_5,v_5,v_6,v_7,v_8,v_9 v1,v2,v3,v4,v5,v5,v6,v7,v8,v9
2. 关键路径
从源点到汇点的路径中,具有最大路径长度的路径;关键路径上的活动为关键活动
- 加快关键活动可以缩短整个工程的工期,但缩短到一定程度,关键活动会为非关键活动
- 若AOE网中关键路径不唯一,只有加快公共的关键路径上的关键活动,才能缩短工期

3. 活动的最早开始时间最晚开始时间
活动最早开始时间 = 活动的起点事件最早开始时间
活动的最晚开始时间 = 活动的终点事件最晚开始时间-活动的时长
活动的最晚开始时间-活动的最早开始时间 = 0 的活动为关键活动

即关键路径为( v 1 , v 4 , v 7 , v 8 , v 10 , v 11 v_1,v_4,v_7,v_8,v_{10},v_{11} v1,v4,v7,v8,v10,v11)
-
-
相关阅读:
使用Go的功能选项模式优雅实现devstream内部复杂对象的创建
接口自动化测试实战之接口概念、项目简介及测试流程问答详解
用例篇 | 单元测试用例复用到集成测试?Testlet Library来助力(上)
C语言模拟类的宏
Python——Python基础编程题目
【Unity Shader】渲染纹理实现镜子效果
关于dubbo快速开发和服务提供者无法注册上注意点
3D制图教程
Ubuntu下MySQL无法启动和访问的问题解决与修复
EasyExcel综合课程实战
- 原文地址:https://blog.csdn.net/qq_40479037/article/details/126439241
