-
人脸识别-Loss-2017:SphereFace【基于angular margin这一流派的人脸识别本质上来说就是基于margin的分类】
论文:《SphereFace: Deep Hypersphere Embedding for Face Recognition》
论文链接:https://arxiv.org/abs/1704.08063
官方代码:https://github.com/wy1iu/sphereface
pytorch代码:https://github.com/clcarwin/sphereface_pytorch这篇是CVPR2017的文章,用改进的softmax做人脸识别,改进点是提出了 angular softmax loss(A-softmax loss)用来改进原来的softmax loss。如果你了解large margin softmax loss(作者和A-softmax loss是同一批人),那么A-softmax loss简单讲就是在large margin softmax loss的基础上添加了两个限制条件||W||=1和b=0,使得预测仅取决于W和x之间的角度。
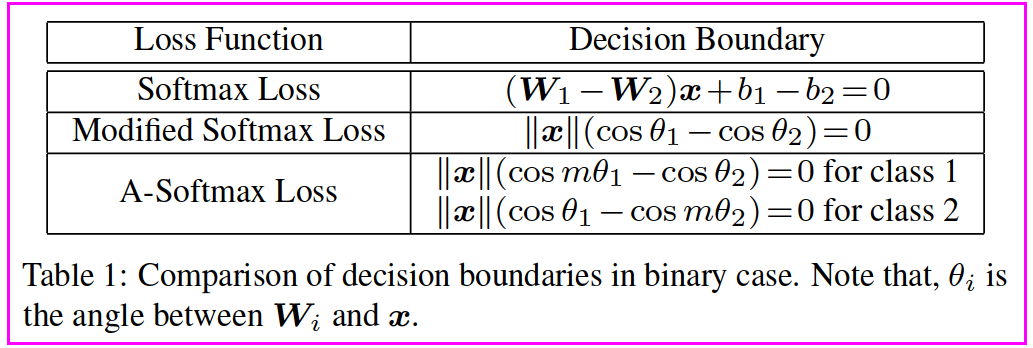
一、Softmax Loss
L i = − log e W y i T x i + b y i ∑ j e W j T x i + b j = − log e ∥ W y i ∥ ∥ x i ∥ cos ( θ y i , i ) + b y i ∑ j e ∥ W j ∥ ∥ x i ∥ cos ( θ j , i ) + b j {{L}_{i}}=-\log \cfrac{{{e}^{W_{y_i}^{T}{{x}_{i}}+{{b}_{y_i}}}}}{\sum\nolimits_{j}{{{e}^{W_{j}^{T}{{x}_{i}}+{{b}_{j}}}}}}=-\log \cfrac{{{e}^{\left\| {{W}_{y_i}} \right\|\left\| {{x}_{i}} \right\|\cos ({{\theta }_{y_i}},i)+{{b}_{y_i}}}}}{\sum\nolimits_{j}{{{e}^{\left\| {{W}_{j}} \right\|\left\| {{x}_{i}} \right\|\cos ({{\theta }_{j}},i)+{{b}_{j}}}}}} Li=−log∑jeWjTxi+bjeWyiTxi+byi=−log∑je∥Wj∥∥xi∥cos(θj,i)+bje∥Wyi∥∥xi∥cos(θyi,i)+byi
二、SphereFace Loss
将 W W W 归一化到 1 1 1,且不考虑偏置项,即 b j = 0 b_j=0 bj=0,则上式变成:
L modified = 1 N ∑ i − log ( e ∥ x i ∥ cos ( θ y i , i ) ∑ j e ∥ x i ∥ cos ( θ j , i ) ) {{L}_{\text{modified}}}=\cfrac{1}{N}\sum\limits_{i}{-\log (\cfrac{{{e}^{\left\| {{x}_{i}} \right\|\cos ({{\theta }_{y_i}},i)}}}{\sum\nolimits_{j}{{{e}^{\left\| {{x}_{i}} \right\|\cos ({{\theta }_{j}},i)}}}}}) Lmodified=N1i∑−log(∑je∥xi∥cos(θj,i)e∥xi∥cos(θyi,i))其中 θ θ θ 为 W W W 和 x x x 的夹角。
为了进一步限制夹角的范围,使用 m θ mθ mθ(其中 θ θ θ 范围为 [ 0 , π m ] [ 0,\cfrac{\pi }{m}] [0,mπ]),上式变成
L ang = 1 N ∑ i − log ( e ∥ x i ∥ cos ( m θ y i , i ) e ∥ x i ∥ cos ( m θ y i , i ) + ∑ j ≠ y i e ∥ x i ∥ cos ( θ j , i ) ) {{L}_{\text{ang}}}=\cfrac{1}{N}\sum\limits_{i}{-\log (\cfrac{{{e}^{\left\| {{x}_{i}} \right\|\cos (m{{\theta }_{y_i}},i)}}}{{{e}^{\left\| {{x}_{i}} \right\|\cos (m{{\theta }_{y_i}},i)}}+\sum\nolimits_{j\ne y_i}{{{e}^{\left\| {{x}_{i}} \right\|\cos ({{\theta }_{j}},i)}}}}}) Lang=N1i∑−log(e∥xi∥cos(mθyi,i)+∑j=yie∥xi∥cos(θj,i)e∥xi∥cos(mθyi,i))
为了使得上式单调,引入 ψ ( θ y i , i ) \psi ({{\theta }_{y_i,i}}) ψ(θyi,i):
L ang = 1 N ∑ i − log ( e ∥ x i ∥ ψ ( θ y i , i ) e ∥ x i ∥ ψ ( θ y i , i ) + ∑ j ≠ y i e ∥ x i ∥ cos ( θ j , i ) ) {{L}_{\text{ang}}}=\cfrac{1}{N}\sum\limits_{i}{-\log (\cfrac{{{e}^{\left\| {{x}_{i}} \right\|\psi ({{\theta }_{y_i,i}})}}}{{{e}^{\left\| {{x}_{i}} \right\|\psi ({{\theta }_{y_i,i}})}}+\sum\nolimits_{j\ne y_i}{{{e}^{\left\| {{x}_{i}} \right\|\cos ({{\theta }_{j}},i)}}}}}) Lang=N1i∑−log(e∥xi∥ψ(θyi,i)+∑j=yie∥xi∥cos(θj,i)e∥xi∥ψ(θyi,i))
其中: ψ ( θ y i , i ) = ( − 1 ) k cos ( m θ y i , i ) − 2 k \psi ({{\theta }_{y_i,i}})={{(-1)}^{k}}\cos (m{{\theta }_{y_i,i}})-2k ψ(θyi,i)=(−1)kcos(mθyi,i)−2k
代码中引入了超参数 λ λ λ,为:
λ = max ( λ min , λ max 1 + 0.1 × i t e r a t o r ) \lambda =\max ({{\lambda }_{\min }},\cfrac{{{\lambda }_{\max }}}{1+0.1\times iterator}) λ=max(λmin,1+0.1×iteratorλmax)
其中, λ min = 5 {{\lambda }_{\min }}=5 λmin=5, λ max = 1500 {{\lambda }_{\max }}=1500 λmax=1500为程序中预先设定的值。
实际的 ψ ( θ ) ψ(θ) ψ(θ) 为
ψ ( θ y i ) = ( − 1 ) k cos ( m θ y i ) − 2 k + λ cos ( θ y i ) 1 + λ \psi ({{\theta }_{y_i}})=\frac{{{(-1)}^{k}}\cos (m{{\theta }_{y_i}})-2k+\lambda \cos ({{\theta }_{y_i}})}{1+\lambda } ψ(θyi)=1+λ(−1)kcos(mθyi)−2k+λcos(θyi)对应下面代码为:
output = cos_theta * 1.0 output[index] -= cos_theta[index]*(1.0+0)/(1+self.lamb) output[index] += phi_theta[index]*(1.0+0)/(1+self.lamb)- 1
- 2
- 3
对于 y i y_i yi 处的计算,
o u t p u t ( y i ) = cos ( θ y i ) − cos ( θ y i ) 1 + λ + ψ ( θ y i ) 1 + λ = ψ ( θ y i ) + λ cos ( θ y i ) 1 + λ = ( − 1 ) k cos ( m θ y i ) − 2 k + λ cos ( θ y i ) 1 + λ output(y_i)=\cos ({{\theta }_{y_i}})-\frac{\cos ({{\theta }_{y_i}})}{1+\lambda }+\frac{\psi ({{\theta }_{y_i}})}{1+\lambda }=\frac{\psi ({{\theta }_{y_i}})+\lambda \cos ({{\theta }_{y_i}})}{1+\lambda }=\frac{{{(-1)}^{k}}\cos (m{{\theta }_{y_i}})-2k+\lambda \cos ({{\theta }_{y_i}})}{1+\lambda } output(yi)=cos(θyi)−1+λcos(θyi)+1+λψ(θyi)=1+λψ(θyi)+λcos(θyi)=1+λ(−1)kcos(mθyi)−2k+λcos(θyi)
和上面的公式对应。代码
class AngleLinear(nn.Module): def __init__(self, in_features, out_features, m = 4, phiflag=True): super(AngleLinear, self).__init__() self.in_features = in_features self.out_features = out_features self.weight = Parameter(torch.Tensor(in_features,out_features)) self.weight.data.uniform_(-1, 1).renorm_(2,1,1e-5).mul_(1e5) self.phiflag = phiflag self.m = m self.mlambda = [ lambda x: x**0, # cos(0*theta)=1 lambda x: x**1, # cos(1*theta)=cos(theta) lambda x: 2*x**2-1, # cos(2*theta)=2*cos(theta)**2-1 lambda x: 4*x**3-3*x, lambda x: 8*x**4-8*x**2+1, lambda x: 16*x**5-20*x**3+5*x ] def forward(self, input): # input为输入的特征,(B, C),B为batchsize,C为图像的类别总数 x = input # size=(B,F),F为特征长度,如512 w = self.weight # size=(F,C) ww = w.renorm(2,1,1e-5).mul(1e5) #对w进行归一化,renorm使用L2范数对第1维度进行归一化,将大于1e-5的截断,乘以1e5,使得最终归一化到1.如果1e-5设置的过大,裁剪时某些很小的值最终可能小于1。注意,第0维度只对每一行进行归一化(每行平方和为1),第1维度指对每一列进行归一化。由于w的每一列为x的权重,因而此处需要对每一列进行归一化。如果要对x归一化,需要对每一行进行归一化,此时第二个参数应为0 xlen = x.pow(2).sum(1).pow(0.5) # 对输入x求平方,而后对不同列求和,再开方,得到每行的模,最终大小为第0维的,即B(由于对x不归一化,但是计算余弦时需要归一化,因而可以先计算模。但是对于w,不太懂为何不直接使用这种方式,而是使用renorm函数?) wlen = ww.pow(2).sum(0).pow(0.5) # 对权重w求平方,而后对不同行求和,再开方,得到每列的模(理论上之前已经归一化,此处应该是1,但第一次运行到此处时,并不是1,不太懂),最终大小为第1维的,即C cos_theta = x.mm(ww) # 矩阵相乘(B,F)*(F,C)=(B,C),得到cos值,由于此处只是乘加,故未归一化 cos_theta = cos_theta / xlen.view(-1,1) / wlen.view(1,-1) # 对每个cos值均除以B和C,得到归一化后的cos值 cos_theta = cos_theta.clamp(-1,1) #将cos值截断到[-1,1]之间,理论上不截断应该也没有问题,毕竟w和x都归一化后,cos值不可能超出该范围 if self.phiflag: cos_m_theta = self.mlambda[self.m](cos_theta) # 通过cos_theta计算cos_m_theta,mlambda为cos_m_theta展开的结果 theta = Variable(cos_theta.data.acos()) # 通过反余弦,计算角度theta,(B,C) k = (self.m*theta/3.14159265).floor() # 通过公式,计算k,(B,C)。此处为了保证theta大于k*pi/m,转换过来就是m*theta/pi,再向上取整 n_one = k*0.0 - 1 # 通过k的大小,得到同样大小的-1矩阵,(B,C) phi_theta = (n_one**k) * cos_m_theta - 2*k # 通过论文中公式,得到phi_theta。(B,C) else: theta = cos_theta.acos() # 得到角度theta,(B, C),每一行为当前特征和w的每一列的夹角 phi_theta = myphi(theta,self.m) # phi_theta = phi_theta.clamp(-1*self.m,1) cos_theta = cos_theta * xlen.view(-1,1) # 由于实际上不对x进行归一化,此处cos_theta需要乘以B。(B,C) phi_theta = phi_theta * xlen.view(-1,1) # 由于实际上不对x进行归一化,此处phi_theta需要乘以B。(B,C) output = (cos_theta,phi_theta) return output # size=(B,C,2) class AngleLoss(nn.Module): def __init__(self, gamma=0): super(AngleLoss, self).__init__() self.gamma = gamma self.it = 0 self.LambdaMin = 5.0 self.LambdaMax = 1500.0 self.lamb = 1500.0 def forward(self, input, target): self.it += 1 cos_theta,phi_theta = input # cos_theta,(B,C)。 phi_theta,(B,C) target = target.view(-1,1) #size=(B,1) index = cos_theta.data * 0.0 #得到和cos_theta相同大小的全0矩阵。(B,C) index.scatter_(1,target.data.view(-1,1),1) # 得到一个one-hot矩阵,第i行只有target[i]的值为1,其他均为0 index = index.byte() # index为float的,转换成byte类型 index = Variable(index) self.lamb = max(self.LambdaMin,self.LambdaMax/(1+0.1*self.it)) # 得到lamb output = cos_theta * 1.0 #size=(B,C) # 如果直接使用output=cos_theta,可能不收敛(未测试,但其他程序中碰到过直接对输入使用[index]无法收敛,加上*1.0可以收敛的情况) output[index] -= cos_theta[index]*(1.0+0)/(1+self.lamb) # 此行及下一行将target[i]的值通过公式得到最终输出 output[index] += phi_theta[index]*(1.0+0)/(1+self.lamb) logpt = F.log_softmax(output) # 得到概率 logpt = logpt.gather(1,target) # 下面为交叉熵的计算(和focal loss的计算有点类似,当gamma为0时,为交叉熵)。 logpt = logpt.view(-1) pt = Variable(logpt.data.exp()) loss = -1 * (1-pt)**self.gamma * logpt loss = loss.mean() # target = target.view(-1) # 若要简化,理论上可直接使用这两行计算交叉熵(此处未测试,在其他程序中使用后可以正常训练) # loss = F.cross_entropy(cos_theta, target) return loss- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
参考资料:
(原)SphereFace及其pytorch代码
SphereFace算法详解
人脸识别之SphereFace
人脸识别论文再回顾之三:sphereface
SphereFace的翻译,解读以及训练 -
相关阅读:
ReactHook技巧
企业最关心的ISO三体系认证的几个问题
【深度学习】python调用超分Real-ESRGAN
什么是Vue.js的响应式系统(reactivity system)?如何实现数据的双向绑定?
为什么 OpenAI 团队采用 Python 开发他们的后端服务?
学习栈,Java实现
深度剖析 —— 文件操作
【面试题】公平锁和非公平锁/可重入锁
【Kubernetes】初识k8s--扫盲阶段
细粒度IP定位参文2(Corr-SLG):A street-level IP geolocation method (2021年)
- 原文地址:https://blog.csdn.net/u013250861/article/details/126415555
