-
桌面级群控机器人平台设计与开发(Cocube单机器人)部分节选
机器人核心技术之一就是控制。
单机器人侧重自身控制的每一个细节;
多机器人侧重集群协作协同的控制。
单机器人如果控制不好,不稳定,指标不达标,就不能实现多机器人控制的预期目标。
和个体人一致,自身管理不到位,那很难去引导他人。
个体-集群,微观-宏观,辩证统一。
节选了四个案例:
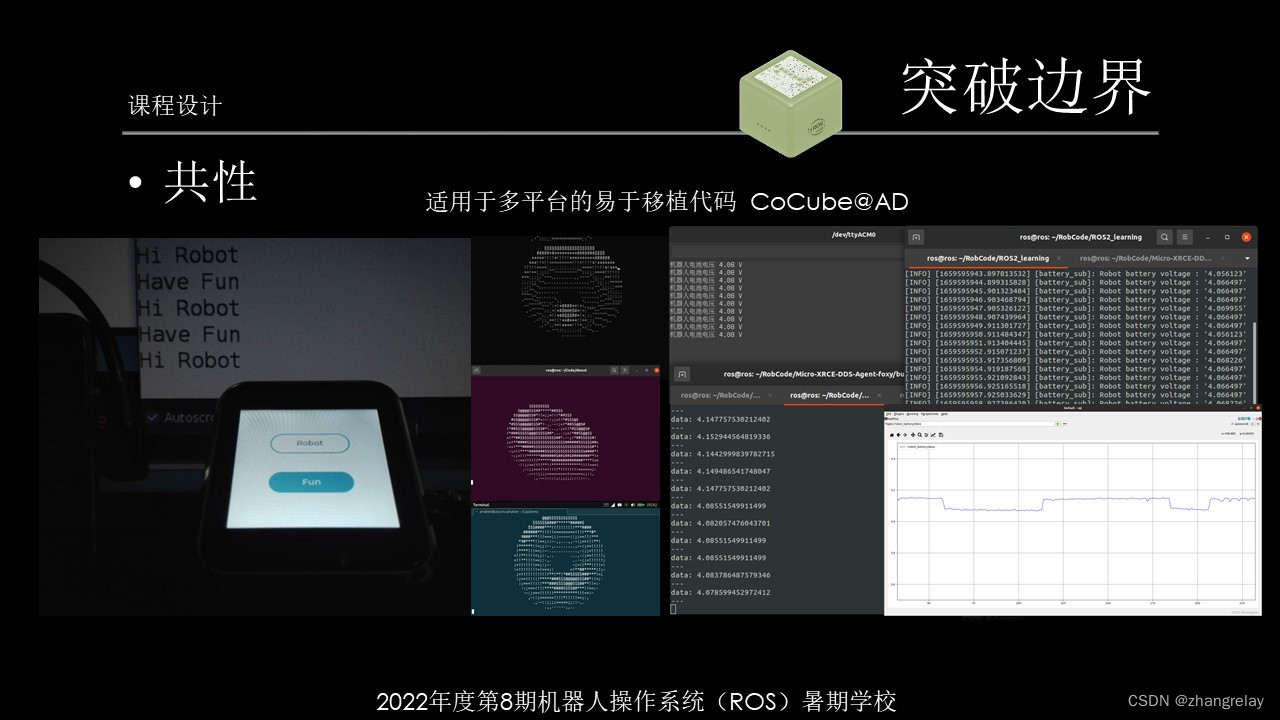
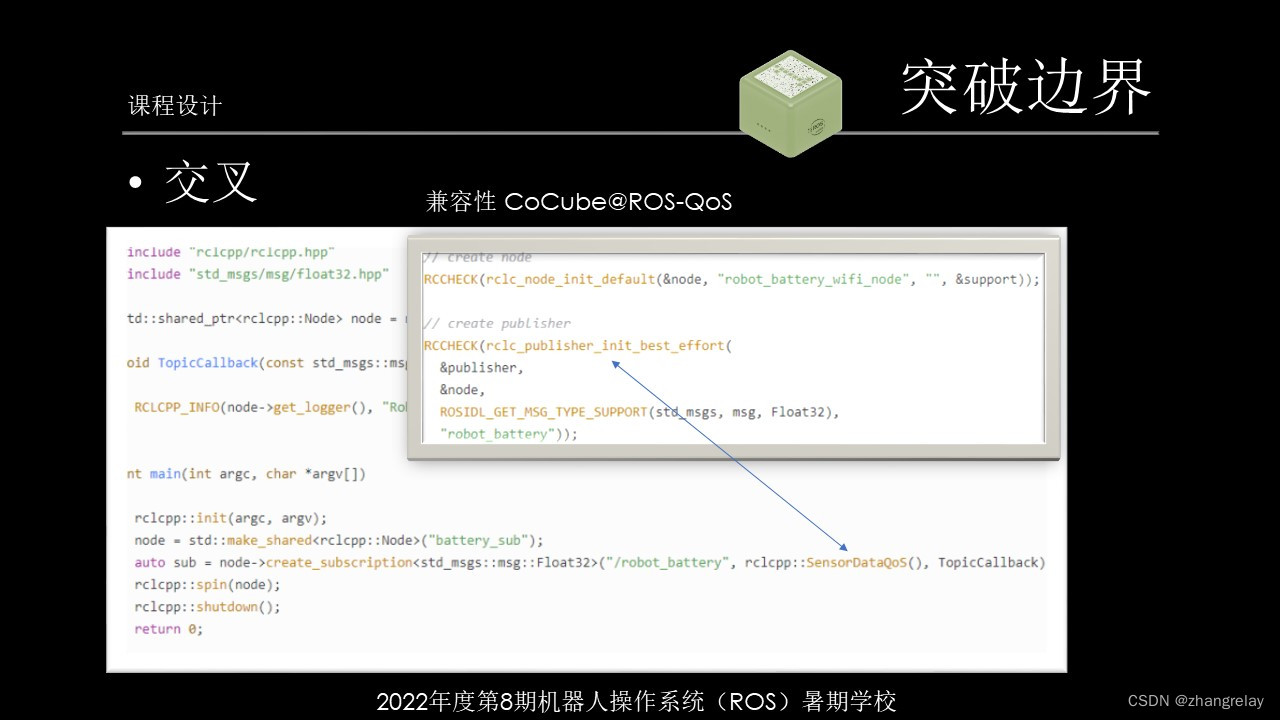
- 突破边界,从课程设计角度思考(教师主导)难
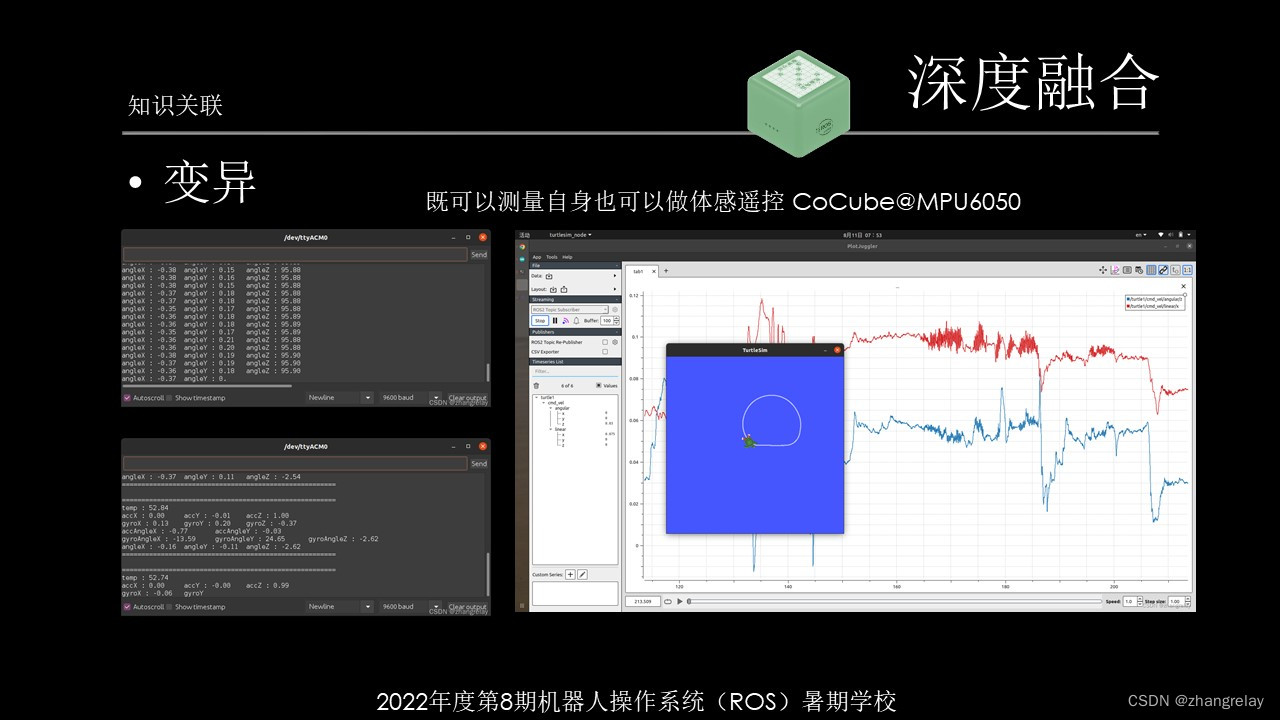
- 深度融合,从知识点关联角度展开 (教师主导)难
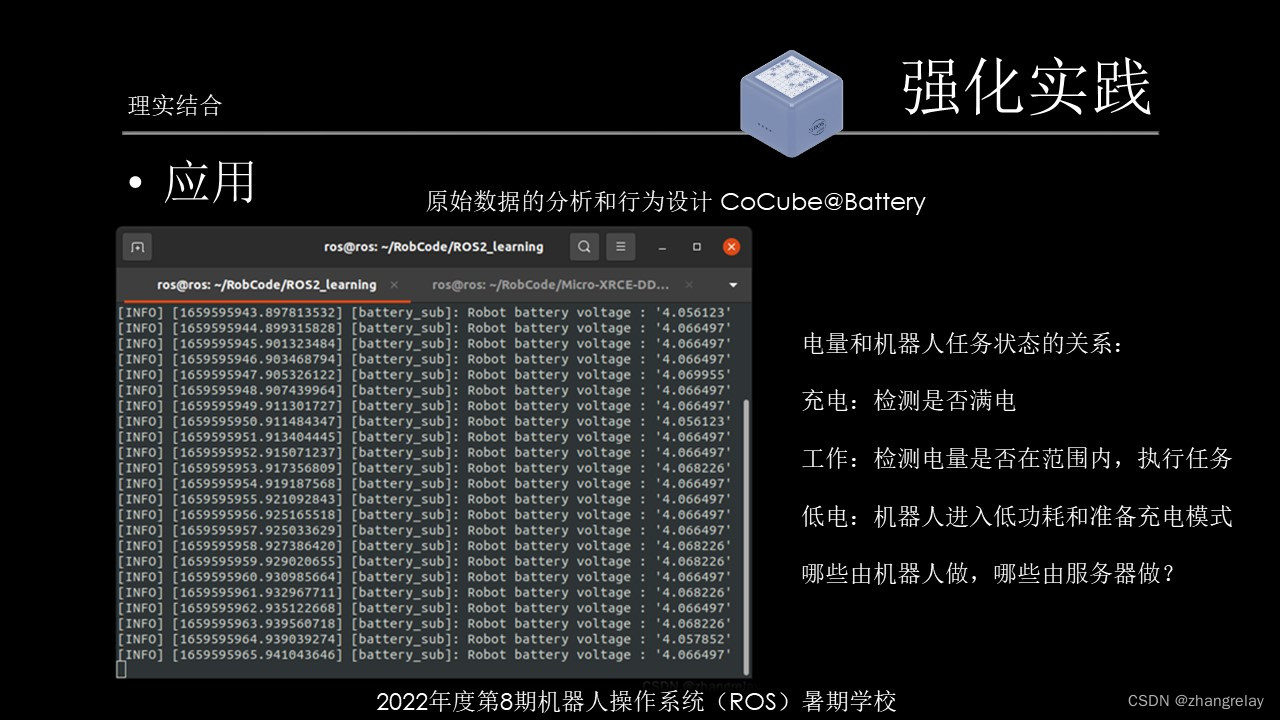
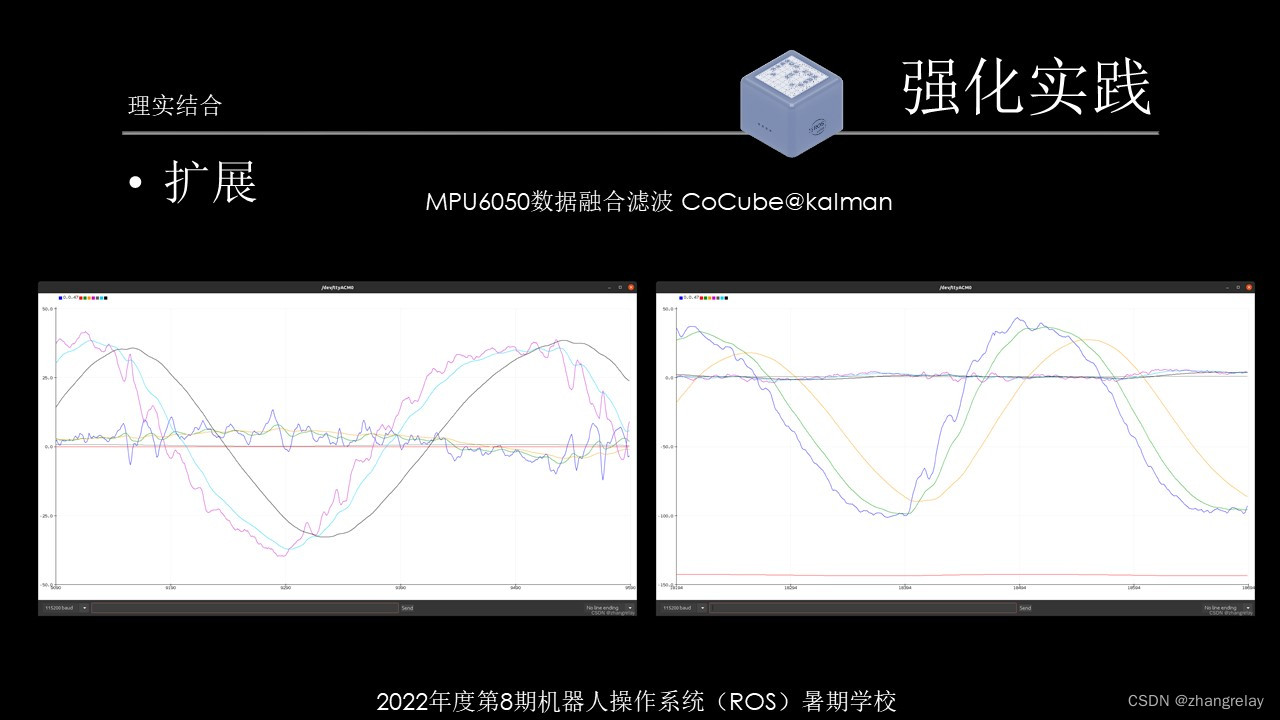
- 强化实践,由基础理论到进阶应用(学生主体)难
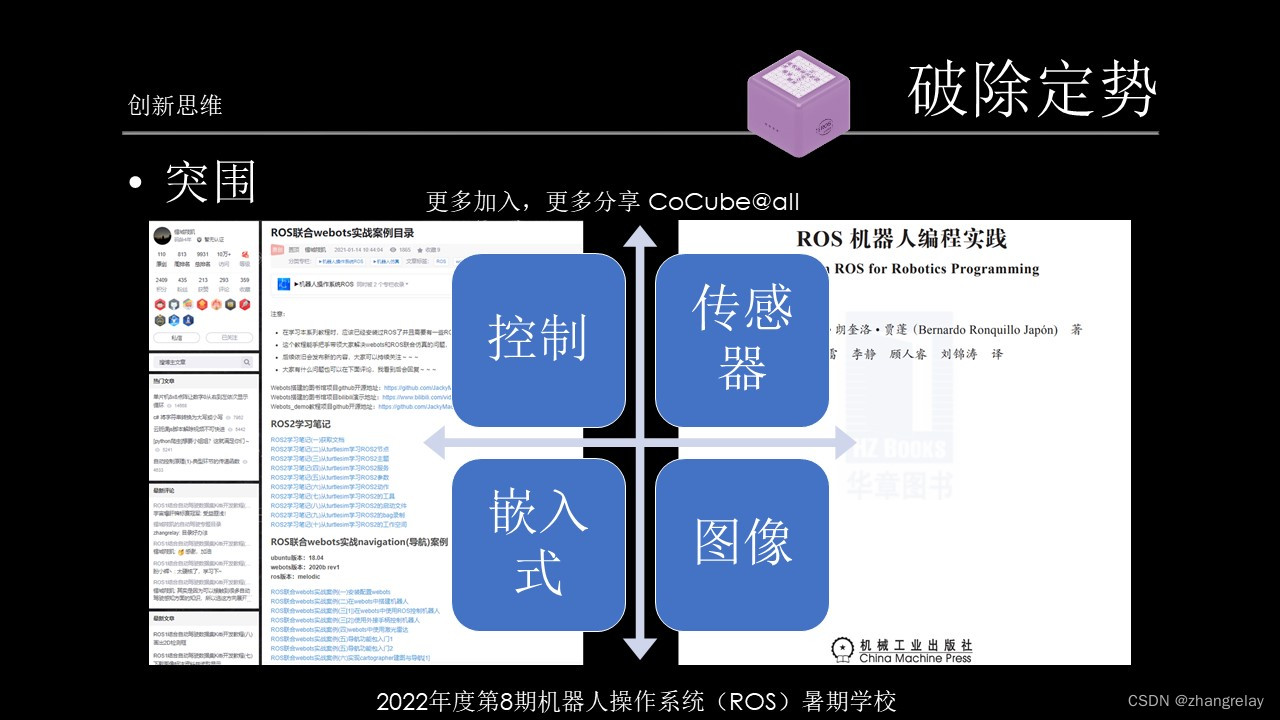
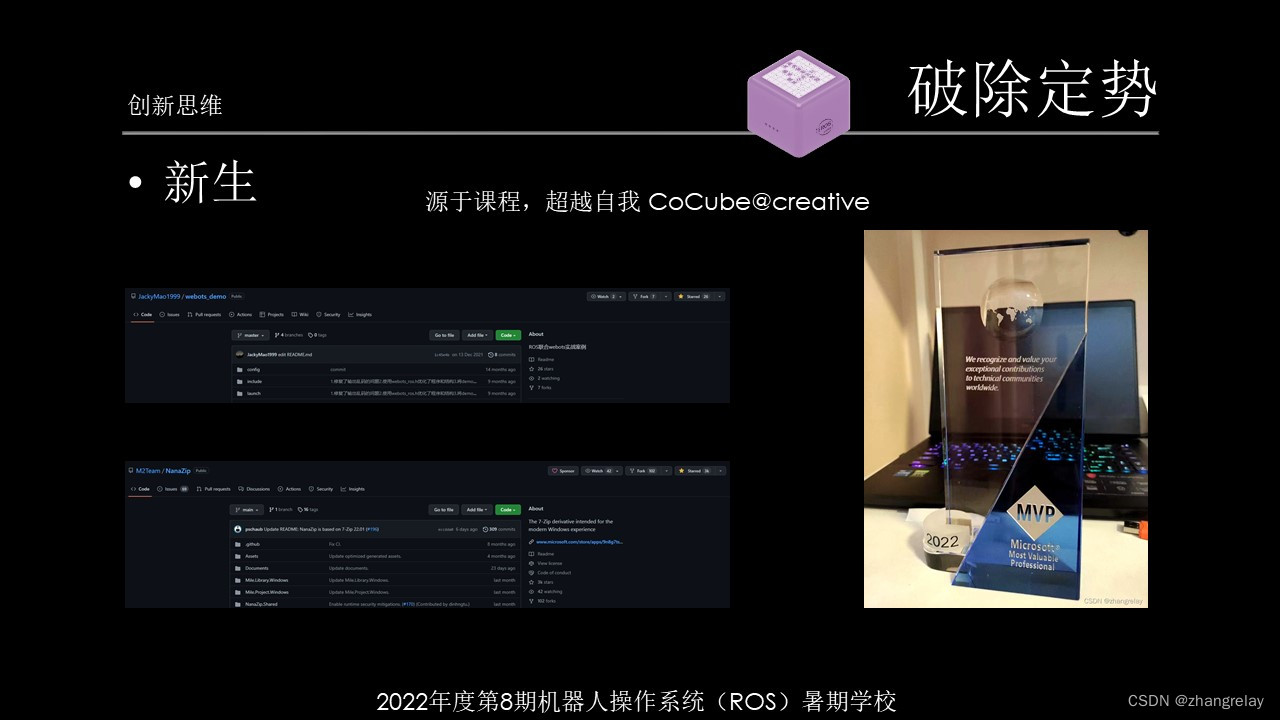
- 破除定势,打碎壁垒实现创新思维(学生主体)极其困难
为何???
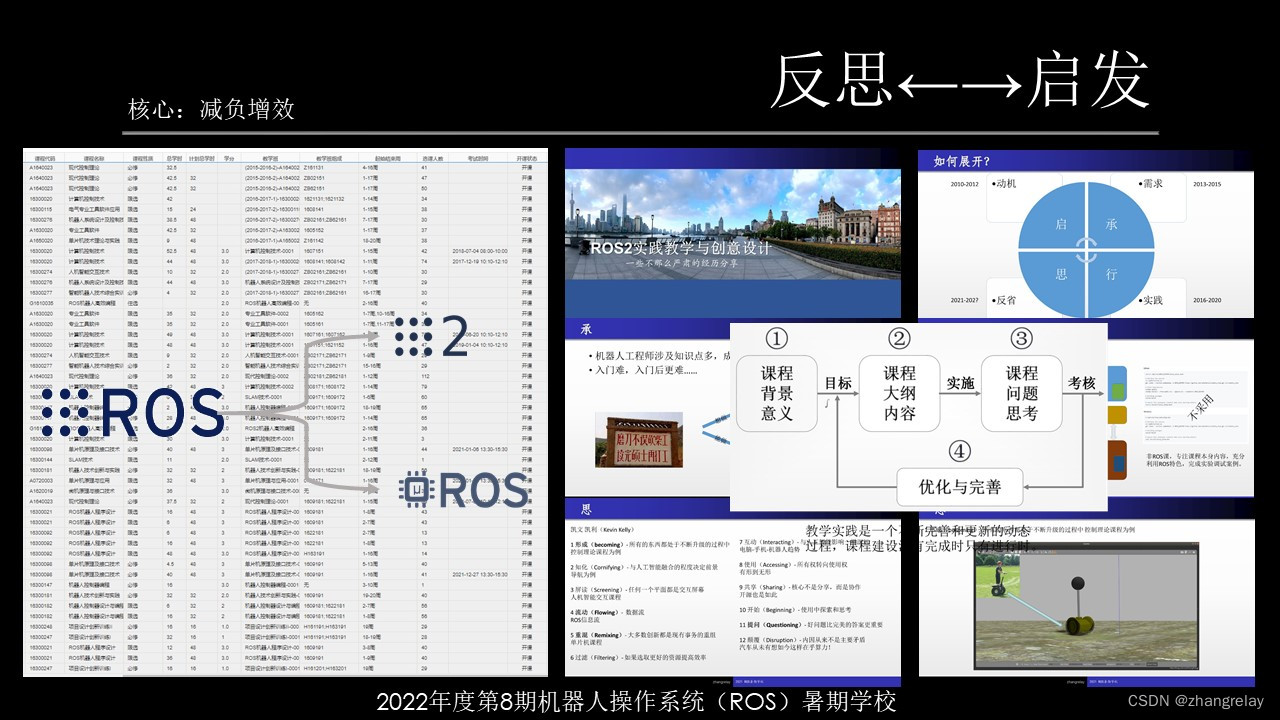
任务繁重,效果极差。
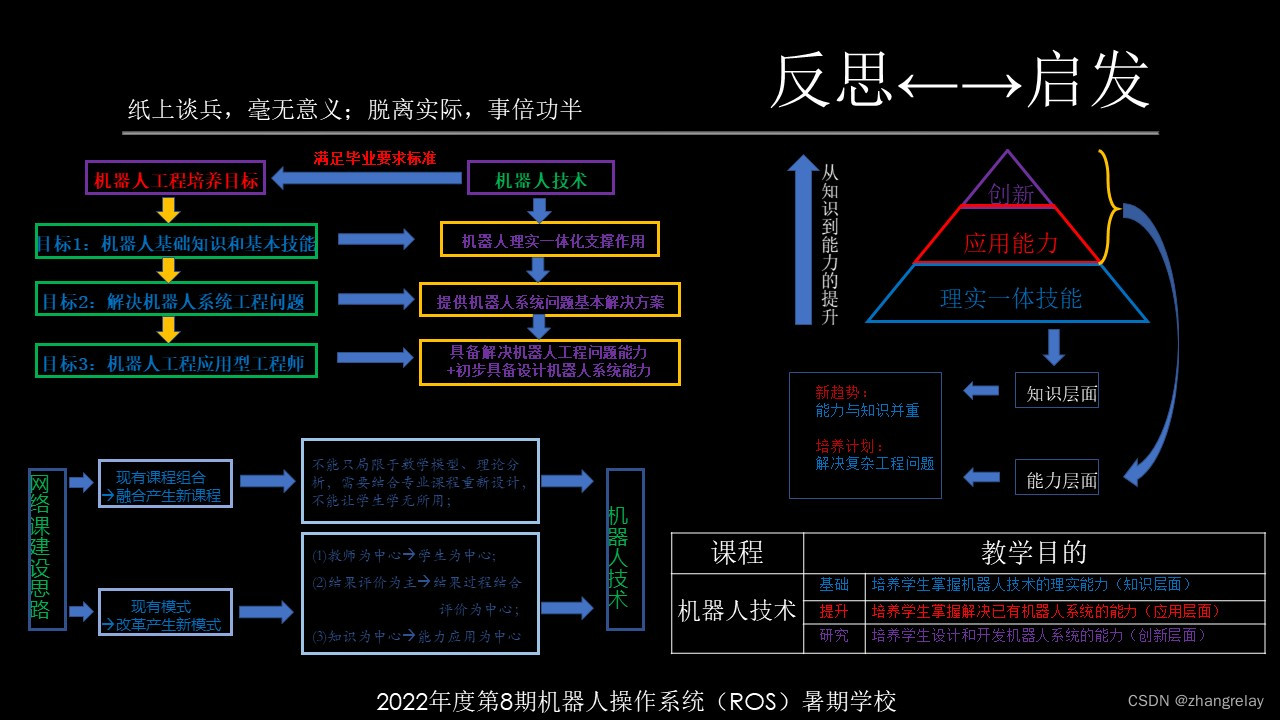
纸上谈兵,毫无意义;脱离实际,必败无疑!!!
为什么我是不合格的高校机器人工程专业讲师?_zhangrelay的博客-CSDN博客
为何所做的课程努力几乎全部失败呢?→机器人工程类←_zhangrelay的博客-CSDN博客
突破边界:
机器人微控制器编程(CoCube)-突破边界_zhangrelay的博客-CSDN博客
深度融合:
机器人微控制器编程(CoCube)-深度融合_zhangrelay的博客-CSDN博客

强化实践:
机器人微控制器编程(CoCube)-强化实践_zhangrelay的博客-CSDN博客
破除定势(如下都是学生或毕业生取得的成果):
包括发布教程帮助更多人,出版教材变被动为主动,取得各种国际奖项等。
机器人微控制器编程(CoCube)-破除定势_zhangrelay的博客-CSDN博客
-
相关阅读:
什么是智能合约,如何熟悉智能合约
Gradle 设置全局镜像源
易基因:植物宏病毒组研究:植物病毒的进化与生态 | 顶刊综述
磁盘监控:告警时发送邮件
MATLAB命令
【LVGL布局】柔性布局
从0到1搭建大数据平台之数据存储
uniapp地图围栏代码
【洛谷】P2916 [USACO08NOV] Cheering up the Cow G(最小生成树--点权转换)
贝塞尔函数
- 原文地址:https://blog.csdn.net/ZhangRelay/article/details/126379311