-
蒙特卡洛策略梯度(REINFORCE算法)及其改进
蒙特卡洛策略梯度(REINFORCE算法)
回顾
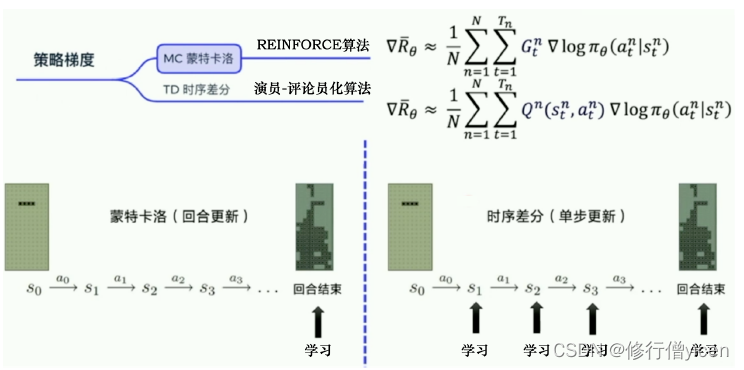
策略梯度中的梯度等于:某一状态下采取某一动作的对数概率乘以一个权重。而这个权重就是回合中的奖励值。

蒙特卡洛策略梯度:REINFORCE
蒙特卡洛算法的核心就是智能体与环境必须完成一个完整的Episode交互。当智能体完成一个Episode后,再利用获得的数据(或轨迹)进行智能体参数 θ \theta θ的更新。即一个Episode,参数更新一次。
根据轨迹数据,可以计算出每一步骤之后未来总奖励 G t G_{t} Gt。 G 1 G_{1} G1表示从第一步往后所能得到的未来总奖励; G 2 G_{2} G2表示从第二步往后所能得到的未来总奖励;依次类推。
计算每一步未来总奖励 G t G_{t} Gt
在训练中可以用列表来依次存储state,action 和reward,具体代码可以表示为:
class Agent(): def __init__(self, state_dim, action_dim): ....其他参数 self.episode_s = [] self.episode_a = [] self.episode_r = [] def store(self, state, action, reward): # 保留回合中的数据 self.episode_s.append(state) self.episode_a.append(action) self.episode_r.append(reward) def learn(self): # 计算从每一个时刻开始,到回合结束所得到的折扣奖励 G = [] g = 0 for r in self.episode_r[::-1]: g = self.gamma * g + r G.insert(0,g)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
计算动作概率
class Policy(nn.Module): def __init__(self, s_dim, a_dim, h_dim): super(Policy, self).__init__() self.s_dim = s_dim self.a_dim = a_dim self.h_dim = h_dim self.fc1 = nn.Linear(self.s_dim, self.h_dim) self.fc2 = nn.Linear(self.h_dim, self.a_dim) def forward(self, state): s = F.relu(self.fc1(state)) a_prob = F.softmax(self.fc2(s),dim=1) return a_prob- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
交互过程中,选择动作
def choose_action(self, state,deterministic): state = torch.tensor(state,dtype=torch.float).to(device) state = torch.unsqueeze(state,dim=0) a_prob = self.policy(state).cpu().data.numpy().flatten() if deterministic: a = np.argmax(a_prob) else: a = np.random.choice(range(self.a_dim),p=a_prob) return a- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
策略更新
策略的loss就是每一步未来总奖励乘以相应动作的对数概率。
def learn(self): # 计算从每一个时刻开始,到回合结束所得到的折扣奖励 G = [] g = 0 for r in self.episode_r[::-1]: g = self.gamma * g + r G.insert(0,g) for i,s in enumerate(self.episode_s): state = torch.unsqueeze(torch.tensor(s,dtype=torch.float),dim=0).to(device) a = self.episode_a[i] a_prob = self.policy(state).flatten() # 展开 g = G[i] #loss = - g * torch.log(a_prob[a]) # loss1 loss = - pow(self.gamma, i) * g * torch.log(a_prob[a])# loss2 # 测试结果显示,loss的收敛效果会更好。第一种方差很大。 self.policy_optim.zero_grad() loss.backward() self.policy_optim.step()- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
蒙特卡洛策略梯度:REINFORCE,使用baseline

当使用baseline策略时,我们需要使用网络计算b。故多增加一个网络
class Value(nn.Module): def __init__(self, state_dim, hidden_width): super(Value, self).__init__() self.fc1 = nn.Linear(state_dim, hidden_width) self.fc2 = nn.Linear(hidden_width, 1) def forward(self, s): s = F.relu(self.fc1(s)) v_s = self.fc2(s) return v_s- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
策略更新
def learn(self): G = [] g = 0 for r in self.episode_r[::-1]: g = self.gamma * g + r G.insert(0,g) # 在列表的index=0的位置插入元素g for i,s in enumerate(self.episode_s): state = torch.unsqueeze(torch.tensor(s,dtype=torch.float),dim=0).to(device) a = self.episode_a[i] a_prob = self.policy(state).flatten() # 展开 g = G[i] v_s = self.value(state).flatten() # policy_loss = - pow(self.gamma, i) * (g-v_s.detach()) * torch.log(a_prob[a]) policy_loss = - (g - v_s.detach()) * torch.log(a_prob[a]) self.policy_optim.zero_grad() policy_loss.backward() self.policy_optim.step() value_loss = (g-v_s)**2 self.value_optim.zero_grad() value_loss.backward() self.value_optim.step() self.episode_s, self.episode_a, self.episode_r = [],[],[] # 一个回合的数据只能用一次- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
注意
蒙特卡洛策略梯度算法,每一个回合的数据只能用一次。用完就扔掉。
使用时序差分方法
- 蒙特卡洛方法的智能体每次都要走完一个Episode后,参数才能开始更新,更新频率比较慢。
- 而时序差分方法的更新频率更高。该方法是使用 Q ( s , a ) Q(s,a) Q(s,a)来近似代替REINFORCE算法中的 G t G_{t} Gt。
参考
https://github.com/Lizhi-sjtu/DRL-code-pytorch/tree/main/1.REINFORCE
-
相关阅读:
241. 为运算表达式设计优先级
设计模式 08 代理模式
Linux环境下 安装部署mysql
【区块链 | 智能合约】Ethereum源代码(3)- 以太坊RPC通信实例和原理代码分析(上)
为 DevOps 战士准备的 Linux 命令
关于Android12安装apk出现-108异常INSTALL_PARSE_FAILED_MANIFEST_MALFORMED的解决方法
一区W&R | 河海大学李轶课题组利用环境兼容的载氧生物炭修复缺氧淡水生物机制
React 中的重新渲染
GaN HEMTs在电力电子应用中的交叉耦合与基板电容分析与建模
N种实用功能,助力企业智破服务难题
- 原文地址:https://blog.csdn.net/weixin_44769214/article/details/126312733
