-
跨时钟域问题(三)异步FIFO的Verilog实现(格雷码)
🏡 博客首页:安静到无声
⛳️ 欢迎关注: ❤️ 点赞 🎒 收藏 ✏️ 留言
🚧 系列专栏:跨时钟域
🎈 如有错误不吝赐教

异步FIFO概述
异步FIFO是用来在两个异步时钟域间传输数据。

图1 用异步FIFO进行数据传输 System X利用xclk时钟将数据写入FIFO,并利用System X利用yclk时钟进行输出。
其中fifo_full和fifo_empty分别是满标志和空标志,用于说明数据状态,当fifo_full时,不再进行数据的写入,当fifo_empty时不再进行数据的读取。
格雷码(gray code)的使用
在产生FIFO满信号时,要将写指针和读指针进行比较,由于两个指针分别在各自的时钟域,彼此之间是异步的,在使用二进制进行计数器实现指针时,就会导致用于比较的指针取样错误。
使用自然二进制码计数时,相邻数据之间可能会产生多bit的变化。这会产生较大的尖峰电流以及其他问题。
比如,二进制计数器的值会从FFF变为000。这时所有位会同时改变。虽然能通过同步计数器避免亚稳态,但是仍然能得到极不相关的取样值,所以同步计数器不是最终的解决方案。
从FFF 到000可能的转换:
- FFF→000
- FFF→001
- FFF→010
- FFF→011
- FFF→100
- FFF→101
- FFF→110
- FFF→111
如果同步时钟边沿在FFF向000转换的中间位置到来,就可能将三位二进制数的任何值取样并同步到新的时钟域中。鉴于以上情况,强烈建议避免使用二进制计数器实现读、写指针。
格雷码是一种相邻数据只有1bit变化的码制。因此可以使用格雷码去取代二进制计数器,并且用打拍的方式去同步(跨时钟域问题(二)(单bit信号跨时钟域 1. 电平同步器 2. 边沿同步器 3. 脉冲检测器))(只有深度为2的n次方才能用格雷码的方式去同步,这样才能保证最大值和最小值只有一位的变化)。我们可以将指针转为格雷码同步到另一个时钟域再进行比较。如果同步时钟在计数值转换期间到来,这种编码能够消除绝大部分的错误。

图2 格雷码编码计数器 2.1 格雷码编码的verilog的实现
自然二进制编码转换为格雷码如下:

图3 二进制转化为格雷码 g r a y _ c o d e = b i n a r y _ c o d e ⊕ ( b i n a r y _ c o d e > > 1 ) gray\_code = binary\_code \oplus (binary\_code > > 1) gray_code=binary_code⊕(binary_code>>1)
格雷码转化为自然二进制

图4 格雷码转化为自然二进制

我们以牛客网VL47 格雷码计数器为例!
代码`timescale 1ns/1ns module gray_counter( input clk , input rst_n , output reg [ 3:0] gray_out ); reg [ 3:0] binary_cnt ; reg flag ; always @(posedge clk or negedge rst_n) begin if (!rst_n) begin flag <= 1'd0; end else begin flag <= ~flag; end end always @(posedge clk or negedge rst_n) begin if (!rst_n) begin binary_cnt <= 1'd0; end else begin if (flag == 1'd1) begin binary_cnt <= binary_cnt + 1'd1; end else begin binary_cnt <= binary_cnt; end end end always @(*) begin gray_out <= binary_cnt ^ (binary_cnt >> 1); end endmodule- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
格雷码下的 fifo空满判断
在判断写满时,要将读地址指针同步到写地址指针的时钟域;在判读读空是,要将写地址指针同步到读地址指针的时钟域。
对于“空”的判断依然依据二者完全相等(包括MSB);
而对于“满”的判断,如下图,由于gray码除了MSB外,具有镜像对称的特点,当读指针指向7,写指针指向8时,除了MSB,其余位皆相同,不能说它为满。因此不能单纯的只检测最高位了,在gray码上判断为满必须同时满足以下3条:
- wr_adr_gray和同步过来的rd_adr_gray的MSB不相等,因为wptr必须比rptr多折回一次。
- wr_adr_gray与rd_adr_gray的次高位不相等(如下图位置7和位置15,转化为二进制对应的是0111和1111,MSB不同说明多折回一次,111相同代表同一位置,而对应的格雷码是最高位相反同时次高位也相反)
- 剩下的其余位完全相等。
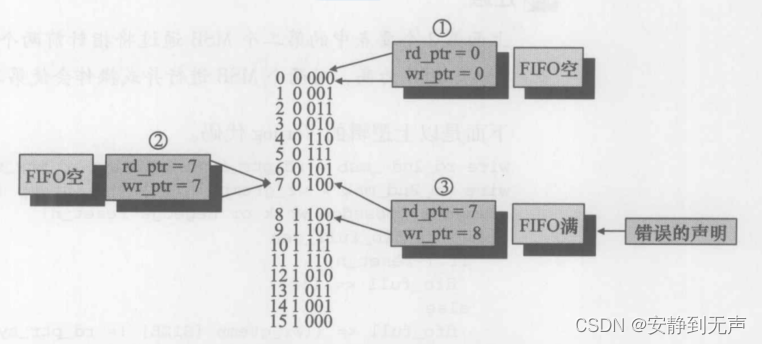
图5 空满信号的判断
异步FIFO代码及仿真实现
module asyn_fifo #( parameter data_width = 16 ,//数据的宽度 parameter data_depth = 8 ,//数据的深度 parameter ram_depth = 256 //定义ram ) ( //复位时钟 input rst_n ,//复位时钟 //写时钟域 input wr_clk ,//写时钟域时钟 input wr_en ,//写使能 input [data_width-1:0] data_in ,//写入数据 output full ,//满标志 //读时钟域 input rd_clk ,//读时钟域时钟 input rd_en ,//读使能 output reg [data_width-1:0] data_out ,//读出数据 output empty //满标志 ); //定义双端口ram的读写地址 wire [data_depth-1:0] wr_adr ;//双端口ram的写地址 wire [data_depth-1:0] rd_adr ;//双端口ram的读地址 //定义双端口ram的读写指针!为什么比读写地址多一位,在博客中讲解! reg [data_depth:0] wr_adr_ptr ;//写指针 reg [data_depth:0] rd_adr_ptr ;//读指针 //转换为格雷码进行打拍操作 wire [data_depth:0] wr_adr_gray ;//写地址指针二进制转化为格雷码 reg [data_depth:0] wr_adr_gray1 ;//打一拍缓存 reg [data_depth:0] wr_adr_gray2 ;//打两拍缓存 wire [data_depth:0] rd_adr_gray ;//读地址指针二进制转化为格雷码 reg [data_depth:0] rd_adr_gray1 ;//打一拍缓存 reg [data_depth:0] rd_adr_gray2 ;//打两拍缓存 //读写地址比控制指针少一位 assign wr_adr = wr_adr_ptr[data_depth-1:0]; assign rd_adr = rd_adr_ptr[data_depth-1:0]; //开辟一段内存空间 reg [data_width-1:0] ram_fifo [ram_depth-1:0] ;//data_width*ram_depth //写数据 integer i; always @(posedge wr_clk or negedge rst_n) begin if (!rst_n) begin for (i = 0; i < ram_depth; i = i + 1) begin ram_fifo[i] <= 'd0; end end else begin if(wr_en && (~full)) begin //如果写使能开启,且未满 ram_fifo[wr_adr] <= data_in; end else begin ram_fifo[wr_adr] <= ram_fifo[wr_adr]; end end end //读数据 always @(posedge rd_clk or negedge rst_n) begin if (!rst_n) begin data_out <= 'd0; end else begin if(rd_en && (~empty)) begin //如果读使能开启,且未空 data_out <= ram_fifo [rd_adr]; end else begin data_out <= 'd0; //否则读出为0 end end end //写地址指针控制 always @(posedge wr_clk or negedge rst_n) begin if (!rst_n) begin wr_adr_ptr <= 'd0; end else begin if(wr_en && (~full)) begin wr_adr_ptr <= wr_adr_ptr + 1'b1; end else begin wr_adr_ptr <= wr_adr_ptr; end end end //读地址指针控制 always @(posedge rd_clk or negedge rst_n) begin if (!rst_n) begin rd_adr_ptr <= 'd0; end else begin if(rd_en && (~empty)) begin rd_adr_ptr <= rd_adr_ptr + 1'b1; end else begin rd_adr_ptr <= rd_adr_ptr; end end end //二进制指针转化为格雷码 assign wr_adr_gray = (wr_adr_ptr >> 1) ^ wr_adr_ptr; assign rd_adr_gray = (rd_adr_ptr >> 1) ^ rd_adr_ptr; //格雷码的同步 读时钟域同步到写时钟域 always @(posedge wr_clk or negedge rst_n) begin if (!rst_n) begin rd_adr_gray1 <= 'd0; rd_adr_gray2 <= 'd0; end else begin rd_adr_gray1 <= rd_adr_gray; rd_adr_gray2 <= rd_adr_gray1; end end //格雷码的同步 写时钟域同步到读时钟域 always @(posedge rd_clk or negedge rst_n) begin if (!rst_n) begin wr_adr_gray1 <= 'd0; wr_adr_gray2 <= 'd0; end else begin wr_adr_gray1 <= wr_adr_gray; wr_adr_gray2 <= wr_adr_gray1; end end //空标志---->表示读空---->同步到读时钟域的写地址指针和读地址指针相同 assign empty = (rd_adr_gray == wr_adr_gray2) ? 1'b1 : 1'b0; assign full = (wr_adr_gray[data_depth] != rd_adr_gray2[data_depth]) && (wr_adr_gray[data_depth-1] != rd_adr_gray2[data_depth-1]) && (wr_adr_gray[data_depth-2:0] == rd_adr_gray2[data_depth-2:0]); endmodule- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
仿真
`timescale 1ns / 1ps module asyn_fifo_tb; reg rst_n ; reg wr_clk ; reg wr_en ; reg [ 15:0] data_in ; wire full ; reg rd_clk ; reg rd_en ; wire [ 15:0] data_out ; wire empty ; asyn_fifo asyn_fifo_inst ( .rst_n (rst_n ), .wr_clk (wr_clk ), .wr_en (wr_en ), .data_in (data_in ), .full (full ), .rd_clk (rd_clk ), .rd_en (rd_en ), .data_out (data_out ), .empty (empty ) ); initial wr_clk = 0; always#10 wr_clk = ~wr_clk; initial rd_clk = 0; always#30 rd_clk = ~rd_clk; always@(posedge wr_clk or negedge rst_n)begin if(!rst_n) data_in <= 'd0; else if(wr_en) data_in <= data_in + 1'b1; else data_in <= data_in; end initial begin rst_n = 0; wr_en = 0; rd_en = 0; #200; rst_n = 1; wr_en = 1; #6000; wr_en = 0; rd_en = 1; #18000; rd_en = 0; $stop; end endmodule- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
仿真结果

vivado的工程已将经传至地址参考
- 硬件架构的艺术——数字电路设计方法与艺术
- 牛客网——格雷码计数器
- https://blog.csdn.net/weixin_41458037/article/details/96499750
- https://www.bilibili.com/video/BV1Wf4y1N7h4?spm_id_from=333.337.search-card.all.click&vd_source=e3e56f2c8b99f0309ca6937cefb13991
-
相关阅读:
MySQL高级十四:索引的基本使用
JavaOOP-类、对象、方法、变量作用域及JavaDoc注释
牛客--汽水瓶python
谷歌浏览器F12开发者模式网络不要展示请求毫秒 谷歌浏览器控制台network界面那个时间段怎么隐藏
高防服务器主要运用在哪些场景?
城市轨道交通站应急照明疏散指示系统设计
代码随想录算法训练营第二十三天|669 修剪二叉搜索树 108 将有序数组转换为二叉搜索树 538 把二叉搜索树转换为累加树
SpringBoot介绍及自动装配
RabbitMQ 模拟实现【四】:虚拟主机设计
触发器,寄存器,三态输出电路
- 原文地址:https://blog.csdn.net/lihuanyu520/article/details/126292771