-
网络模型(DeepLab, DeepLabv3)
参考
和之前模型的区别
1、U-net系列的应用场景是小目标, 所以局部特征就足够了。但是当用来分割大目标的时候,就不太友好了。
2、为了增大感受野,传统分割算法会选择pooling,但这样会丢失一部分信息。
3、基于上述问题,DeepLab提出空洞卷积(delated convolution)增大感受野。
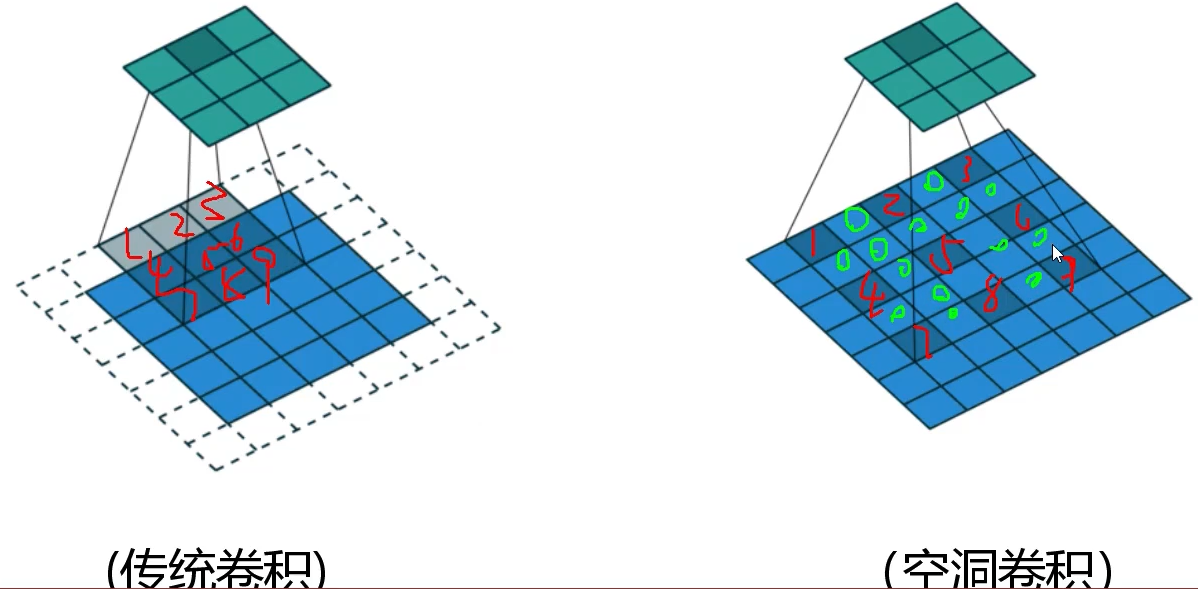
空洞卷积的优势
1、增大感受野
2、通过设置dilation rate参数完成空洞卷积,不增加额外的计算
3、可以按照参数扩大任意倍数的感受野, 并且不引入额外的参数
4、应用简单,在卷积层中设置一个参数就可以了。
(可学习空洞卷积?)SPP(图像金字塔:获取图像的多尺度(多感受野)特征)
ASPP 基于SPP使用空洞卷积
DeepLabv3 模型

-
相关阅读:
OD【1】:自定义Dataset
【OpenStack云平台】Packmaker 集群
经典卷积和深度卷积的神经网络
内网渗透之PTH&PTT&PTK(域控)
人工智能已经帮助世界各地的研究人员推断远远超出人类认知能力范围的关系
浅谈敏捷开发
学完这套jmeter结果数据写入到指定文件,涨薪3k没问题
CSS 技术
阿里云核心产品list
SpringBoot集成Redisson操作Redis
- 原文地址:https://blog.csdn.net/qq_40837795/article/details/126247261